
Heim >Technologie-Peripheriegeräte >KI >Wie schwierig ist es für einen Roboter, die Kraft seiner Hände zu beherrschen und die Hausarbeit sicher zu erledigen? Der Vizepräsident von 1X Artificial Intelligence schreibt eine ausführliche Erklärung
Wie schwierig ist es für einen Roboter, die Kraft seiner Hände zu beherrschen und die Hausarbeit sicher zu erledigen? Der Vizepräsident von 1X Artificial Intelligence schreibt eine ausführliche Erklärung

- WBOYOriginal
- 2024-09-02 16:34:12900Durchsuche


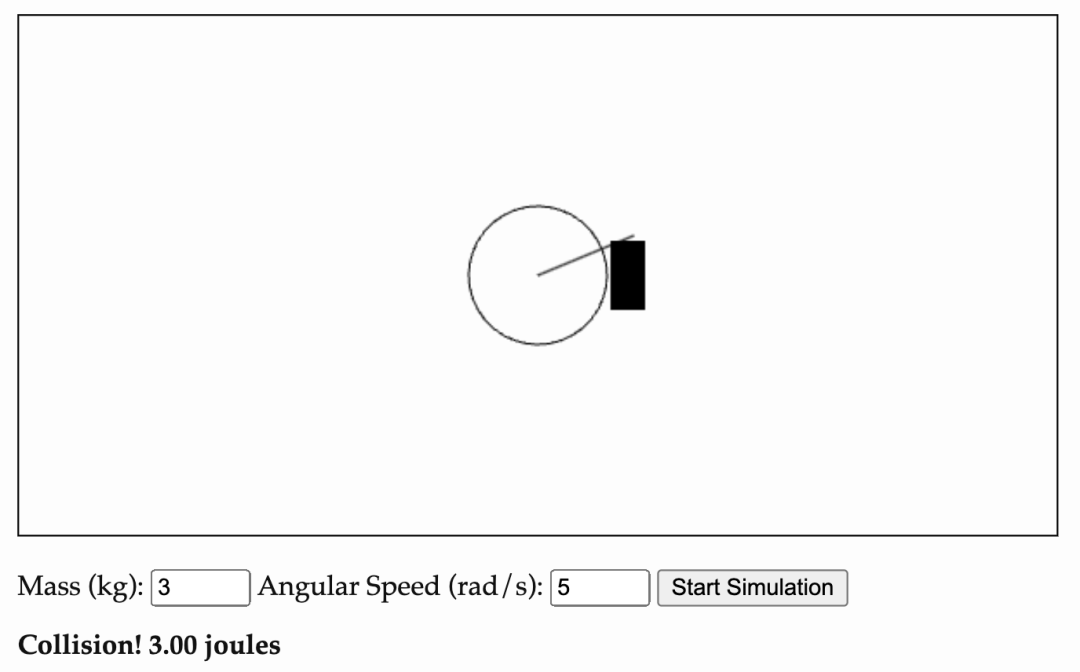
 , wobei I das Trägheitsmoment und ω die Winkelgeschwindigkeit ist. Da angenommen wird, dass der Hebel keine Masse hat, entspricht die Trägheit des Systems der eines festen Zylinders:
, wobei I das Trägheitsmoment und ω die Winkelgeschwindigkeit ist. Da angenommen wird, dass der Hebel keine Masse hat, entspricht die Trägheit des Systems der eines festen Zylinders:  . Wenn wir die Werte einsetzen, erhalten wir I = 0,24 kg⋅m^2. Daher kann die kinetische Rotationsenergie dieses Systems weiter auf 3 Joule berechnet werden.
. Wenn wir die Werte einsetzen, erhalten wir I = 0,24 kg⋅m^2. Daher kann die kinetische Rotationsenergie dieses Systems weiter auf 3 Joule berechnet werden. 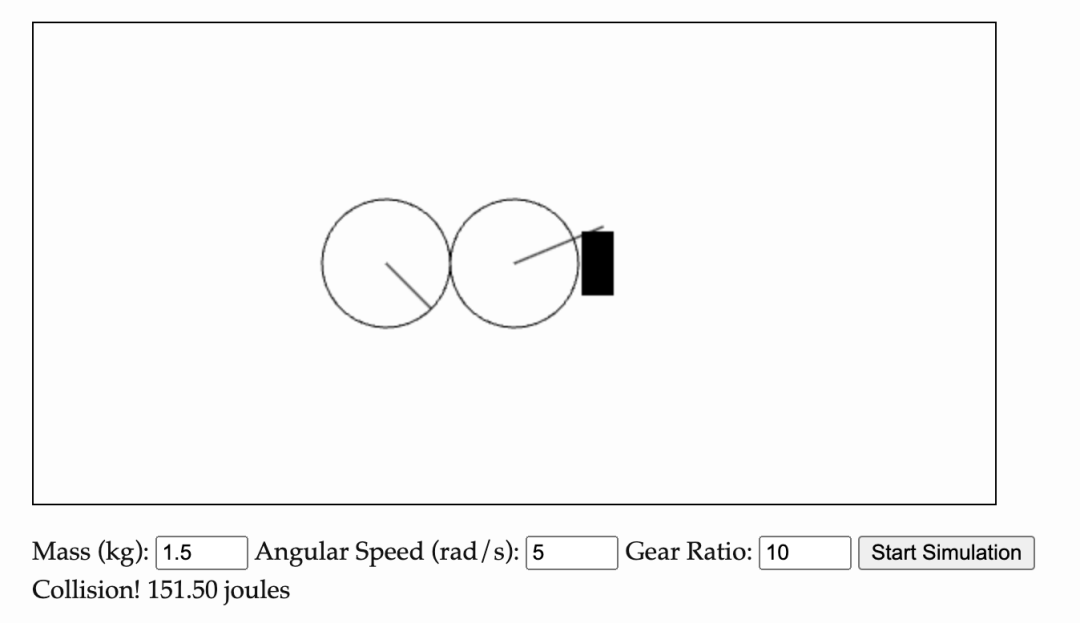

Der Grund dafür ist, dass das Getriebe eine entscheidende mechanische Hebelwirkung bietet: Viele Motoren können im Einzelbetrieb nicht genügend Drehmoment liefern, daher installieren Ingenieure Zahnräder bei Hochgeschwindigkeitsmotoren für das nötige Drehmoment geopfert.
Diese Art von Zahnradsystem ist „starr“ und kann nicht „umgekehrt“ angetrieben werden. Sobald die Zahnräder anfangen zu rotieren, greifen sie fest ineinander und es wird schwierig, sie zu drehen Kehren Sie um. Am anderen Ende des Getriebes muss also mehr Kraft aufgewendet werden, um der vom Hochgeschwindigkeitsmotor erzeugten Rotationskraft standzuhalten.
Basierend auf den oben genannten Überlegungen engagiert sich 1X Technologies seit zehn Jahren für die Herstellung von Motoren mit hohem Drehmoment und niedriger Drehzahl, um die Sicherheit des Übertragungssystems zu maximieren. Dank des vom NEO-Roboter verwendeten Motor- und Antriebssystems mit kleineren Übersetzungsverhältnissen und geringerem Gewicht ist er der erste echte Haushaltsroboter, der sicher in die häusliche Umgebung integriert werden kann.
1 Daten sind die Grundlage für Fortschritt allgemeiner Roboter. Roboterhardware ist teuer, und die Einstellung menschlicher Fernbediener zur Ausführung von Aufgaben mit sperriger Hardware ist ebenso teuer. Darüber hinaus ist die Effizienz der Fernsteuerung sehr gering und liegt weit unter der Geschwindigkeit, mit der Menschen Aufgaben direkt erledigen können.
2. Wenn wir Menschen Kopfkameras anschnallen und sie große Gummihandschuhe tragen lassen, die ihre Haut bedecken, können wir schnell einen großen Datensatz von Menschen sammeln, die verschiedene Aufgaben ausführen und Aufgaben. Normale Menschen erledigen in ihrem Alltag unbewusst eine Vielzahl unterschiedlicher Handlungen und betrieblicher Aufgaben. Obwohl es schwierig ist, die Rohbewegungsausgabe direkt wahrzunehmen, können wir durch die Analyse von Posenänderungen in Videos auf Aktionen schließen. Diese Art der Datenerfassung könnte dazu beitragen, Hindernisse für die Entwicklung von Allzweckrobotern abzubauen, bis fortschrittlichere Hardware verfügbar ist.
3. Es gibt viele Ego- und Third-Person-Videos im Internet, mit denen Roboter trainiert werden können, verschiedene Aktivitäten, die Menschen in Videos ausführen, zu erkennen und zu erlernen, wodurch sie weiter expandieren unsere Datengröße.
Bevor wir diese Art der Datenerfassung erweitern, ist es auch wichtig zu beachten, dass es in unserem Körper keine schnell rotierenden Teile gibt, verglichen mit einem Motor, der sich mit 5000 U/min dreht , die kinetische Energie der Muskeln ist sehr gering, die effektive Masse, die wir beim Bewegen tragen, ist auch viel kleiner. Sie werden also feststellen, dass die Gelenkwinkel eines Roboters zwar ungefähr denen eines Menschen entsprechen, die effektive Masse, die von seinen rotierenden Motoren bereitgestellt wird, jedoch möglicherweise gleich ist zu groß, um die Aufgabe geschickt auszuführen.
Selbst wenn wir effiziente Bewegungssteuerungsstrategien entwickeln, können Roboter bei der Ausführung von Aktionen wie dem einfachen Ein- und Ausschalten von Lichtern oder dem eleganten Laufen immer noch nicht die menschliche Geschwindigkeit und Gewandtheit erreichen. Denn die Kräfte, die Roboter beim Berühren von Objekten ausüben, unterscheiden sich deutlich von denen des Menschen.
Wenn Sie also menschliche Videos schnell in Roboterbewegungsstrategien umwandeln möchten, benötigen Sie die folgenden Methoden:
1. Ein sehr nachgiebiger und flexibler Roboter wie NEO
2. Lassen Sie den Roboter die Bewegungsbahn des Videos mit einer Geschwindigkeit verfolgen, die langsamer als 1x ist, anstatt es direkt zu kopieren. Dynamik der „menschlichen Hardware“. Dies eignet sich jedoch nur für statische Betriebsaufgaben und nicht für Aufgaben, die den Kontakt mit vielen Gegenständen erfordern, wie zum Beispiel das Falten von Kleidung und das Zubereiten von Speisen in der Küche.
3. Entkoppeln Sie Bewegungsplanung und dynamische Planung, sodass sich die Bewegungsplanung auf das Erreichen der Zielposition konzentrieren kann, während sich die dynamische Planung auf die Kontrolle der Kraft konzentriert, wenn eine Kollision auftritt.
Das obige ist der detaillierte Inhalt vonWie schwierig ist es für einen Roboter, die Kraft seiner Hände zu beherrschen und die Hausarbeit sicher zu erledigen? Der Vizepräsident von 1X Artificial Intelligence schreibt eine ausführliche Erklärung. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
Stellungnahme:
Der Inhalt dieses Artikels wird freiwillig von Internetnutzern beigesteuert und das Urheberrecht liegt beim ursprünglichen Autor. Diese Website übernimmt keine entsprechende rechtliche Verantwortung. Wenn Sie Inhalte finden, bei denen der Verdacht eines Plagiats oder einer Rechtsverletzung besteht, wenden Sie sich bitte an admin@php.cn
Vorheriger Artikel:Mit der Integration von mehr als 200 verwandten Studien ist hier die neueste Übersicht über das große Modell „Lebenslanges Lernen“.Nächster Artikel:Mit der Integration von mehr als 200 verwandten Studien ist hier die neueste Übersicht über das große Modell „Lebenslanges Lernen“.
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr