



写在前面&笔者的个人理解
该算法允许在线高精度地图构建。我们的方法MapTracker将传感器流累积到两种显示的内存缓冲区中:1)鸟瞰图(BEV)空间中的Raster latents和2)道路元素(即人行横道、车道线和道路边界)上的Vector latents。该方法借鉴了目标跟踪中的查询传播范式,该范式明确地将前一帧的跟踪道路元素与当前帧相关联,同时融合了与距离步幅的内存latents 子集,以进

开源链接:https://map-tracker.github.io/
总结来说,本文的主要贡献如下:
- 一种新的矢量HD建图算法,将HD建图公式化为跟踪任务,并利用两种表示中的memory latents历史来实现时间一致性;
- 一种改进的矢量HD建图基准,具有时间一致的GT和一致性感知的mAP metric;
- SOTA性能!在传统和新的度量上比当前的最佳方法有显着改进。
相关工作回顾
本文通过两种方式来思考和解决一致向量HD建图问题。我们首先回顾了基于视觉的自动驾驶中使用Transformer和记忆设计的视觉目标跟踪的最新趋势。最后,我们讨论了竞争矢量HD建图方法。
使用transformers进行视觉目标跟踪。视觉目标跟踪有着悠久的历史,其中端到端transformer方法由于其简单性而成为最近的趋势。 TrackFormer、TransTrack和MOTR利用注意力机制和跟踪查询来显式关联跨帧的实例。 MeMOT和MeMOTR进一步扩展了具有记忆机制的跟踪transformer,以获得更好的长期一致性。本文通过将跟踪查询与更稳健的内存机制结合起来,将矢量HD建图公式化为跟踪任务。
自动驾驶中的Memory设计。单帧自动驾驶系统在处理遮挡、传感器故障或复杂环境方面存在困难。具有Memory的时间建模提供了有希望的补充。存在许多用于光栅BEV功能的Memory设计,这些功能构成了大多数自动驾驶任务的基础。 BEVDet4D和BEVFormerv2将多个过去帧的特征叠加为Memory,但计算随着历史长度线性扩展,难以捕获长期信息。 VideoBEV跨帧传播BEV光栅查询,以循环积累信息。在向量域中,Sparse4Dv2使用类似的RNN风格的内存进行目标查询,而Sparse4Dv3进一步使用时间去噪进行稳健的时间学习。这些思想已被矢量HD建图方法部分纳入。本文针对道路元素的光栅BEV潜伏时间和矢量潜伏时间提出了一种新的存储器设计。
矢量HD建图。传统上,高精地图是用基于SLAM的方法离线重建的,然后是人工管理,需要高昂的维护成本。随着精度和效率的提高,在线矢量高精地图算法比离线地图算法更受关注,这将简化生产流程并处理地图更改。 HDMapNet通过后处理将光栅图分割转化为矢量图实例,并建立了第一个矢量HD建图基准。 VectorMapNet和MapTR都利用基于DETR的transformer进行端到端预测。前者自回归地预测每个检测到的曲线的顶点,而后者使用分层查询和匹配损失来同时预测所有顶点。 MapTRv2通过辅助任务和网络修改进一步补充了MapTR。曲线表示、网络设计和训练范式是其他工作的重点。 StreamMapNet通过借鉴BEV感知中的流思想,朝着一致建图迈出了一步。该想法将过去的信息累积为memory latents,并作为条件(即条件检测框架)通过。 SQD MapNet模仿DN-DETR,提出了时间曲线去噪以促进时间学习。
MapTracker

鲁棒记忆机制是MapTracker的核心,它将传感器流累积为两种表示的latent memories: 1)自上而下的BEV坐标系中车辆周围区域的鸟瞰(BEV)记忆作为潜在图像;和2)道路元素(即,行人专用区交叉口、车道线和道路边界)的矢量(VEC)记忆作为一组潜在量。
两个简单的想法与memory机制实现了一致的建图。第一个想法是使用历史的memory buffer,而不是当前帧的单个memory。单个memory应该保存整个历史的信息,但很容易丢失memory,尤其是在有大量车辆遮挡道路结构的杂乱环境中。具体地说,为了效率和覆盖率,我们基于车辆运动在每一帧选择过去latent memories的子集进行融合。第二个想法是将在线高精地图制定为跟踪任务。VEC memory机制保持每个道路元素的memory latents期序列,并通过借用跟踪文献中的查询传播范式使该公式变得简单。本节的其余部分解释了我们的神经架构(见图2和图3),包括BEV和VEC memory buffers及其相应的网络模块,然后介绍了训练细节。
Memory Buffers
BEV memory是BEV坐标系中的2D latent,以车辆为中心并在第t帧处定向。空间维度(即50×100)覆盖矩形区域,左/右15m,前/后30m。每个存储器潜伏时间累积整个过去的信息,而buffer在最后20帧中保持这样的memory latents时间,使得memory机制冗余但稳健。
VECmemory是一组向量潜伏时间,每个向量latents时间累积直到帧t的活动道路元素的信息。活动元素的数量随帧而变化。buffer保存过去20帧的latent vectors及其在帧之间的对应关系(即,对应于相同道路元素的矢量潜伏序列)。
BEV Module

输入是 1)由图像主干处理的机载环视图像的CNN特征及其相机参数;2) BEV memory buffer和3)车辆运动。以下内容解释了BEV模块体系结构的四个组成部分及其输出。
- BEV Query Propagation:BEV memory是车辆坐标系中的2D latent image。仿射变换和双线性插值将当前BEV memory初始化为先前的BEV memory。对于变换后位于latent image之外的像素,每像素可学习的嵌入向量是初始化,其操作在图3中表示为“MaskBlend”。
- Deformable Self-Attention:可变形的自注意力层丰富了BEV memory。
- Perspective-to-BEV Cross-Attention:与StreamMapNet类似,BEVFormer的空间可变形交叉注意力层将透视图信息注入MBEV(t)。
- BEV Memory Fusion:buffer中的memory latents被融合以丰富MBEV(t)。使用所有的memories在计算上是昂贵且冗余的。
输出是1)保存到buffer并传递到VEC模块的最终memory MBEV(t);以及2)由分割头推理并用于损失计算的光栅化道路元素几何图形S(t)。分割头是一个线性投影模块,将memory latent中的每个像素投影到2×2的分割掩模,从而产生100×200的掩模。
VEC Module
输入是BEV memory MBEV(t)和vector memory buffer以及车辆运动;
- Vector Query Propagation:vector memory是活动道路元素的一组潜在矢量。
- Vector Instance Self Attention:标准的自注意力层;
- BEV-to-Vector Cross Attention:Multi-Point Attention;
- Vector Memory Fusion:对于当前存储器MVEC(t)中的每个潜在矢量,将缓冲器中与相同道路元素相关联的潜在矢量进行融合以丰富其表示。相同的跨步帧选择选择四个潜在向量,其中对于一些具有短跟踪历史的道路元素,所选择的帧π(t)将不同且更少。例如,跟踪了两帧的元素在buffer中只有两个latents。
输出是1)通过来自MVEC(t)的单个完全连接层的分类测试的“positive”道路元素的最终存储器MVEC(t);以及2)由来自MVEC(t)的3层MLP回归的正道路元素的矢量道路几何形状。
Training
BEV loss:

VEC损失。受MOTR(一种用于多目标跟踪的端到端转换器)的启发,我们将基于匹配的损失扩展到明确考虑GT跟踪。新元素的最佳实例级标签分配定义为:

然后归纳定义所有输出和GT之间的标签分配ω(t):

矢量输出的跟踪样式损失为:

转换损失。我们借用StreamMapNet中的转换损失Ltrans来训练PropMLP,这强制潜在空间中的查询转换保持向量几何和类类型。最后的训练损失是:

Consistent Vector HD Mapping Benchmarks
Consistent ground truth
MapTR从nuScenes和Agroverse2数据集创建了矢量HD建图基准,被许多后续研究采用。然而,人行横道是天真地合并在一起的,而且跨框架不一致。分割线也与其图形跟踪过程的失败不一致(对于Argoverse2)。
StreamMapNet继承了VectorMapNet的代码,并创建了一个具有更好真实性的基准,该基准已在研讨会挑战中使用。然而,仍然存在一些问题。对于Argoverse2,分隔线有时会拆分为较短的线段。对于nuScenes,大型人行横道有时会分割出小环路,其不一致性在每帧中随机出现,导致暂时不一致的表示。我们在附录中提供了现有基准问题的可视化。
我们改进了现有基准的处理代码,以(1)增强每帧的GT几何结构,然后(2)计算它们在帧之间的对应关系,形成GT“轨迹”。
(1) 增强每帧几何图形。我们继承和改进了在社区中流行的MapTR代码库,同时进行了两个更改:用StreamMapNet中的处理取代步行区处理,并通过更多的几何约束来提高质量;以及通过增强图跟踪算法来处理原始注释的噪声来增强除法器处理中的时间一致性(仅适用于Argoverse2)。
(2) Forming tracks。给定每帧道路元素的几何结构,我们求解每对相邻帧之间的最优二分匹配问题,以建立道路元素的对应关系。成对的对应关系被链接以形成道路元素的轨迹。一对道路元素之间的匹配分数定义如下。道路元素几何图形是多边形曲线或环形。我们根据车辆运动将旧帧中的元素几何体转换为新帧,然后将具有一定厚度的两条曲线/循环光栅化为实例遮罩。他们在并集上的交集是匹配的分数。
Consistency-aware mAP metric
mAP度量不会惩罚暂时不一致的重建。我们将重建的道路元素和每个帧中的地面实况与倒角距离独立匹配,如在标准mAP过程中一样,然后通过以下检查消除暂时不一致的匹配。首先,对于不预测跟踪信息的基线方法,我们使用与获得GT时间对应关系相同的算法来形成重建道路元素的轨迹(我们还扩展了算法,通过权衡速度来重新识别丢失的元素;详细信息请参阅附录)。接下来,让“祖先”是属于前一帧中相同轨迹的道路元素。从序列的一开始,如果它们的祖先中有任何一个不匹配,我们就会将每帧匹配(重建元素和地面实况元素)删除为暂时不一致。然后利用剩余的暂时一致的匹配来计算标准mAP。
实验
我们基于StreamMapNet代码库构建我们的系统,同时使用8个NVIDIA RTX A5000 GPU在nuScenes上为72个epoch和Argoverse2上为35个epoch训练我们的模型。三个训练阶段的批量大小分别为16、48和16。训练大约需要三天时间,而推理速度大约为10 FPS。在解释了数据集、指标和基线方法之后,本节提供了实验结果。


我们的贡献之一是在两个现有的对应物(即MapTR和StreamMapNet)上实现了暂时一致的地面实况(GT)。表1和表2显示了在三个GT中的一个上训练和测试系统的结果(如第一列所示)。由于我们的代码库是基于StreamMapNet的,我们在StreamMapNet GT和我们的临时一致GT上评估我们的系统。
nuScenes结果。表1显示,MapTRv2和StreamMapNet都使用我们的GT实现了更好的mAP,这是我们在修复其原始GT中的不一致性时所期望的。 StreamMapNet的改进略高,因为它具有时间建模(而MapTR没有),并利用了数据中的时间一致性。 MapTracker显着优于竞争方法,尤其是在我们的一致性GT在原始和一致性意识mAP得分中分别提高了8%和22%以上的情况下。注意,MapTracker是唯一产生明确跟踪信息(即,重构元素在帧之间的对应关系)的系统,这是一致性区域mAP所需要的。一个简单的匹配算法为基线方法创建轨迹。
Argoverse2结果。表2显示,MapTRv2和StreamMapNet都通过我们一致的GT获得了更好的mAP分数,它除了暂时一致之外,还具有更高质量的GT(用于人行横道和分隔物),使所有方法都受益。 MapTracker在所有设置中都以显着的优势(即分别为11%或8%)优于所有其他基线。一致性意识评分(C-mAP)进一步证明了我们卓越的一致性,比StreamMapNet提高了18%以上。
Results with geographically non-overlapping data

nuScenes和Agroverse2数据集的官方训练/测试划分具有地理重叠(即,训练/测试中出现相同的道路),这允许过度拟合。表3比较了StreamMapNet和MapTracker提出的基于地理上不重叠分割的最佳基线方法。 MapTracker始终以显着的优势表现出色,表现出强大的跨场景泛化能力。请注意,对于这两种方法,nuScenes数据集的性能都会降低。经过仔细检查,道路要素的检测是成功的,但回归的坐标误差很大,导致性能低下。附录提供了更多分析。
Ablation studies

表4中的消融研究证明了MapTracker中关键设计元素的贡献。第一个“基线”条目是StreamMapNet,它没有时间推理能力(即没有BEV和矢量流存储器和模块)。第二个条目是StreamMapNet。两种方法都训练了110个时期,直到完全收敛。最后三个条目是MapTracker的变体,包含或不包含关键设计元素。第一种变体丢弃BEV/VEC模块中的存储器融合组件。该变体利用跟踪公式,但依赖于单个BEV/VEC存储器来保存过去的信息。第二种变体添加了内存缓冲区和内存融合组件,但没有跨步,即使用最新的4帧进行融合。这种变体提高了性能,证明了我们记忆机制的有效性。最后一种变体添加了内存跨步,从而更有效地利用了内存机制并提高了性能。
Qualitative evaluations

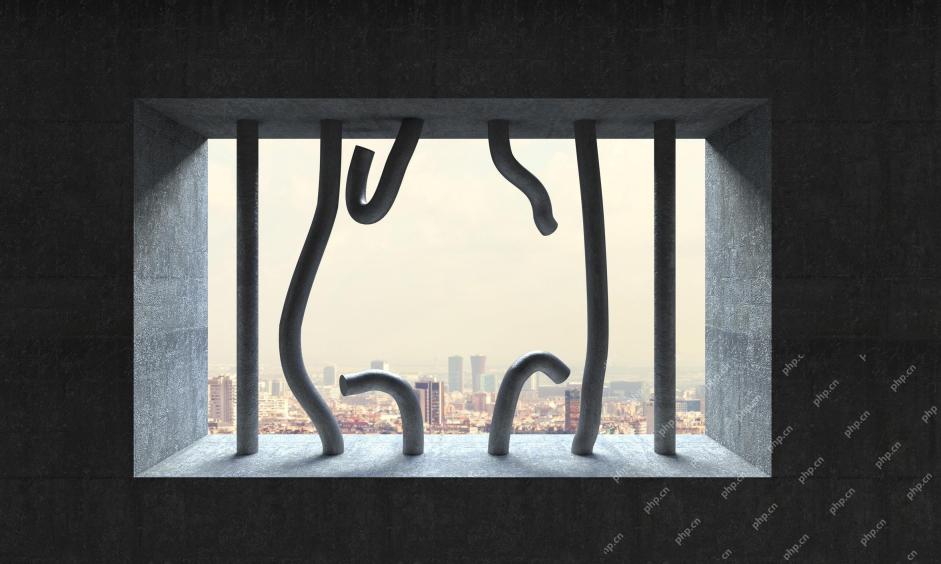
图4显示了MapTracker和基线方法在nuScenes和Argoverse2数据集上的定性比较。为了更好地可视化,我们使用一种简单的算法将每帧矢量HD地图合并为全局矢量HD地图。有关合并算法和每帧重建的可视化的详细信息,请参阅附录。 MapTracker产生了更精确、更干净的结果,显示出卓越的整体质量和时间一致性。对于车辆正在转弯或没有轻微向前移动的场景(包括图1中的两个示例),StreamMapNet和MapTRv2可能会产生不稳定的结果,从而导致破碎和嘈杂的合并结果。这主要是因为基于检测的公式难以在复杂的车辆运动下维持时间相干重建。
结论
本文介绍了MapTracker,它将在线HD映射公式化为跟踪任务,并利用raster and vector latents的历史来保持时序一致性。我们使用查询传播机制来跨帧关联被跟踪的道路元素,并将所选择的memory entries的子集与距离步幅融合以增强一致性。我们还通过使用跟踪标签生成一致的GT,并通过时序一致性检查增强原始mAP指标,来改进现有的基准。当使用传统度量进行评估时,MapTracker在nuScenes和Agroverse2数据集上显着优于现有方法,并且当使用我们的一致性感知度量进行评估后,它表现出了卓越的时序一致性。
局限性:我们确定了MapTracker的两个局限性。首先,当前的跟踪公式不处理道路元素的合并和分割(例如,U形边界在未来的帧中分割成两条直线,反之亦然)。基本事实也不能恰当地代表他们。其次,我们的系统仍处于10 FPS,实时性能有点不足,尤其是在关键的崩溃事件中。优化效率和处理更复杂的现实世界道路结构是我们未来的工作。
以上是在线地图还能这样?MapTracker:用跟踪实现在线地图新SOTA!的详细内容。更多信息请关注PHP中文网其他相关文章!

 一个提示可以绕过每个主要LLM的保障措施Apr 25, 2025 am 11:16 AM
一个提示可以绕过每个主要LLM的保障措施Apr 25, 2025 am 11:16 AM隐藏者的开创性研究暴露了领先的大语言模型(LLM)的关键脆弱性。 他们的发现揭示了一种普遍的旁路技术,称为“政策木偶”,能够规避几乎所有主要LLMS
 5个错误,大多数企业今年将犯有可持续性Apr 25, 2025 am 11:15 AM
5个错误,大多数企业今年将犯有可持续性Apr 25, 2025 am 11:15 AM对环境责任和减少废物的推动正在从根本上改变企业的运作方式。 这种转变会影响产品开发,制造过程,客户关系,合作伙伴选择以及采用新的
 H20芯片禁令震撼中国人工智能公司,但长期以来一直在为影响Apr 25, 2025 am 11:12 AM
H20芯片禁令震撼中国人工智能公司,但长期以来一直在为影响Apr 25, 2025 am 11:12 AM最近对先进AI硬件的限制突出了AI优势的地缘政治竞争不断升级,从而揭示了中国对外国半导体技术的依赖。 2024年,中国进口了价值3850亿美元的半导体
 如果Openai购买Chrome,AI可能会统治浏览器战争Apr 25, 2025 am 11:11 AM
如果Openai购买Chrome,AI可能会统治浏览器战争Apr 25, 2025 am 11:11 AM从Google的Chrome剥夺了潜在的剥离,引发了科技行业中的激烈辩论。 OpenAI收购领先的浏览器,拥有65%的全球市场份额的前景提出了有关TH的未来的重大疑问
 AI如何解决零售媒体的痛苦Apr 25, 2025 am 11:10 AM
AI如何解决零售媒体的痛苦Apr 25, 2025 am 11:10 AM尽管总体广告增长超过了零售媒体的增长,但仍在放缓。 这个成熟阶段提出了挑战,包括生态系统破碎,成本上升,测量问题和整合复杂性。 但是,人工智能
 'AI是我们,比我们更多'Apr 25, 2025 am 11:09 AM
'AI是我们,比我们更多'Apr 25, 2025 am 11:09 AM在一系列闪烁和惰性屏幕中,一个古老的无线电裂缝带有静态的裂纹。这堆积不稳定的电子设备构成了“电子废物土地”的核心,这是身临其境展览中的六个装置之一,&qu&qu
 Google Cloud在下一个2025年对基础架构变得更加认真Apr 25, 2025 am 11:08 AM
Google Cloud在下一个2025年对基础架构变得更加认真Apr 25, 2025 am 11:08 AMGoogle Cloud的下一个2025:关注基础架构,连通性和AI Google Cloud的下一个2025会议展示了许多进步,太多了,无法在此处详细介绍。 有关特定公告的深入分析,请参阅我的文章
 IR的秘密支持者透露,Arcana的550万美元的AI电影管道说话,Arcana的AI Meme,Ai Meme的550万美元。Apr 25, 2025 am 11:07 AM
IR的秘密支持者透露,Arcana的550万美元的AI电影管道说话,Arcana的AI Meme,Ai Meme的550万美元。Apr 25, 2025 am 11:07 AM本周在AI和XR中:一波AI驱动的创造力正在通过从音乐发电到电影制作的媒体和娱乐中席卷。 让我们潜入头条新闻。 AI生成的内容的增长影响:技术顾问Shelly Palme


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

SecLists
SecLists是最终安全测试人员的伙伴。它是一个包含各种类型列表的集合,这些列表在安全评估过程中经常使用,都在一个地方。SecLists通过方便地提供安全测试人员可能需要的所有列表,帮助提高安全测试的效率和生产力。列表类型包括用户名、密码、URL、模糊测试有效载荷、敏感数据模式、Web shell等等。测试人员只需将此存储库拉到新的测试机上,他就可以访问到所需的每种类型的列表。

VSCode Windows 64位 下载
微软推出的免费、功能强大的一款IDE编辑器

SublimeText3汉化版
中文版,非常好用

WebStorm Mac版
好用的JavaScript开发工具

