



相机和激光雷达的标定是许多任务中至关重要的基础工作,标定的准确度直接影响了后续方案融合的效果上限。随着许多自动驾驶和机器人公司投入了大量的人力和物力来不断提高标定的准确性,今天我们将为大家介绍一些常见的Camera-Lidar标定工具箱,建议大家收藏起来!
1.Libcbdetect
一次拍摄多棋盘格检测:https://www.cvlibs.net/software/libcbdetect/
使用MATLAB编写的算法能够自动提取角点并将它们精确到亚像素级别,并将这些角点组合成矩形棋盘状的图案。该算法具有处理不同类型图像(如针孔相机、鱼眼相机、全景相机)的能力。

2.Autoware 标定包
Autoware 框架的激光雷达-相机标定工具包。
链接:https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator

3.基于3D-3D匹配的靶标标定
基于3D-3D点对应关系的激光雷达相机标定,ROS包,出自论文《LiDAR-Camera Calibration using 3D-3D Point correspondences》!
链接:https://github.com/ankitdhall/lidar_camera_calibration

4.上海 AI Lab OpenCalib
上海人工智能实验室出品,OpenCalib提供了一个传感器标定工具箱。工具箱可用于标定IMU、激光雷达、相机和Radar等传感器。
链接:https://github.com/PJLab-ADG/SensorsCalibration


5.Apollo 标定工具
Apollo标定工具箱,链接:https://github.com/ApolloAuto/apollo/tree/master/modules/calibration
6.Livox-camera标定工具
本方案提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
链接:https://github.com/Livox-SDK/livox_camera_lidar_calibration
中文文档:https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/README_cn.md

7.CalibrationTools
CalibrationTools为激光雷达-激光雷达、激光雷达相机等传感器对提供标定工具。除此之外,还提供了:
1)定位-偏差估计工具估计用于航位推算(IMU和里程计)的传感器的参数,以获得更好的定位性能!
2)Autoware控制输出的可视化和分析工具;
3)用于修复车辆指令延迟的校准工具;
链接:https://github.com/tier4/CalibrationTools

8.Matlab
Matlab自带的工具箱,支持激光雷达和相机的标定,链接:https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html

9.ROS 标定工具
ROS Camera LIDAR Calibration Package,链接:https://github.com/heethesh/lidar_camera_calibration

10.Direct visual lidar calibration
该软件包提供了一个用于激光雷达相机标定的工具箱:可通用:它可以处理各种激光雷达和相机投影模型,包括旋转和非重复扫描激光雷达,以及针孔、鱼眼和全向投影相机。无目标:它不需要标定目标,而是使用环境结构和纹理进行标定。单次拍摄:标定至少只需要一对激光雷达点云和相机图像。可选地,可以使用多个激光雷达相机数据对来提高精度。自动:标定过程是自动的,不需要初始猜测。准确和稳健:它采用了像素级直接激光雷达相机配准算法,与基于边缘的间接激光雷达相机配准相比,该算法更稳健和准确。
链接:https://github.com/koide3/direct_visual_lidar_calibration
11.2D lidar-camera工具箱
这是一个基于 ROS 的单线激光和相机外参数自动标定代码。标定原理如下图所示,相机通过二维码估计标定板平面在相机坐标系下的平面方程,由于激光点云落在平面上,将点云通过激光坐标系到相机坐标系的外参数 转换到相机坐标系,构建点到平面的距离作为误差,使用非线性最小二乘进行求解。
链接:https://github.com/MegviiRobot/CamLaserCalibraTool

以上是相机与激光雷达是怎么标定的?一览行业所有主流的标定工具的详细内容。更多信息请关注PHP中文网其他相关文章!

 langgraph教程初学者May 08, 2025 am 10:12 AM
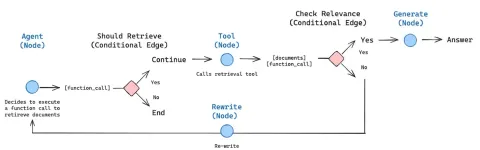
langgraph教程初学者May 08, 2025 am 10:12 AMLangchain的Langgraph:构建复杂LLM应用程序的初学者指南 使用大语言模型(LLM)构建应用程序为创建智能,交互式系统提供了令人兴奋的可能性。 但是,复杂性增加了信号
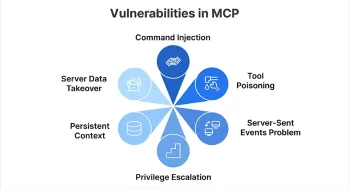 MCP中的6个安全风险:识别主要漏洞 - 分析VidhyaMay 08, 2025 am 09:32 AM
MCP中的6个安全风险:识别主要漏洞 - 分析VidhyaMay 08, 2025 am 09:32 AM模型上下文协议(MCP):AI代理的安全雷区 模型上下文协议(MCP)通常被称为“ AI代理的USB-C”,是将大型语言模型(LLMS)与外部工具和数据连接起来的标准。 这允许
 如何使用代理抹布构建智能常见问题解答聊天机器人May 07, 2025 am 11:28 AM
如何使用代理抹布构建智能常见问题解答聊天机器人May 07, 2025 am 11:28 AM人工智能代理人现在是企业大小的一部分。从医院的填写表格到检查法律文件到分析录像带和处理客户支持 - 我们拥有各种任务的AI代理。伴侣
 从恐慌到权力:领导者在AI时代必须学到什么May 07, 2025 am 11:26 AM
从恐慌到权力:领导者在AI时代必须学到什么May 07, 2025 am 11:26 AM生活是美好的。 也可以预见的是,您的分析思维更喜欢它的方式。您今天只开会进入办公室,完成一些最后一刻的文书工作。之后,您要带您的伴侣和孩子们度过当之无愧的假期去阳光
 为什么预测AGI将超过AI专家的科学共识的原因为什么May 07, 2025 am 11:24 AM
为什么预测AGI将超过AI专家的科学共识的原因为什么May 07, 2025 am 11:24 AM但是,科学共识具有打ic和陷阱,也许是通过使用融合的实验,也称为合奏,也许是一种更谨慎的方法。 让我们来谈谈。 对创新AI突破的这种分析是我的一部分
 工作室吉卜力的困境 - 生成AI时代的版权May 07, 2025 am 11:19 AM
工作室吉卜力的困境 - 生成AI时代的版权May 07, 2025 am 11:19 AMOpenai和Studio Ghibli都没有回应此故事的评论请求。但是他们的沉默反映了创造性经济中更广泛,更复杂的紧张局势:版权在生成AI时代应该如何运作? 使用类似的工具
 mulesoft为镀锌代理AI连接制定混合May 07, 2025 am 11:18 AM
mulesoft为镀锌代理AI连接制定混合May 07, 2025 am 11:18 AM混凝土和软件都可以在需要的情况下镀锌以良好的性能。两者都可以接受压力测试,两者都可以随着时间的流逝而遭受裂缝和裂缝,两者都可以分解并重构为“新建”,两种功能的产生
 据报道,Openai达成了30亿美元的交易来购买WindsurfMay 07, 2025 am 11:16 AM
据报道,Openai达成了30亿美元的交易来购买WindsurfMay 07, 2025 am 11:16 AM但是,许多报告都在非常表面的水平上停止。 如果您想弄清楚帆冲浪的全部内容,您可能会或可能不会从显示在Google搜索引擎顶部出现的联合内容中得到想要的东西


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

Dreamweaver Mac版
视觉化网页开发工具

SublimeText3 Linux新版
SublimeText3 Linux最新版

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

DVWA
Damn Vulnerable Web App (DVWA) 是一个PHP/MySQL的Web应用程序,非常容易受到攻击。它的主要目标是成为安全专业人员在合法环境中测试自己的技能和工具的辅助工具,帮助Web开发人员更好地理解保护Web应用程序的过程,并帮助教师/学生在课堂环境中教授/学习Web应用程序安全。DVWA的目标是通过简单直接的界面练习一些最常见的Web漏洞,难度各不相同。请注意,该软件中

Atom编辑器mac版下载
最流行的的开源编辑器

