



静态定位测量的基本原理和概念是什么?
随着现代科技的快速发展,定位技术在各个领域中扮演着重要的角色。静态定位是一种常用的定位方法之一,其基本概念和原理对于实现精准定位至关重要。
静态定位是通过收集环境中已知位置的控制点和接收器接收到的可见卫星信号,利用差分模型进行计算,从而获得目标点的三维坐标。其基本原理是利用卫星信号的到达时间差来计算接收器与控制点之间的距离差,从而得到目标点的位置。
静态定位的核心是差分模型,它基于以下两个假设:
- 接收器的时钟偏差是未知的,但是卫星信号的到达时间是可测量的。
- 卫星信号在传输过程中的速度是恒定的。
根据以上假设,静态定位可以通过以下步骤进行:
- 收集控制点的坐标和接收器接收到的卫星信号数据。
- 对卫星信号数据进行处理,首先要找到同时在接收器和控制点中可见的卫星。
- 对于每个可见卫星,计算接收器与卫星之间的伪距观测值,即接收到信号的时间与信号发出的时间之间的差值乘以光速。
- 根据控制点和接收器的坐标以及伪距观测值,使用差分模型进行计算,求解接收器的位置。
下面以Python代码示例来说明静态定位的实现过程。
import numpy as np
# 定义控制点的坐标
X = np.array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
# 定义接收器的观测值
P = np.array([10, 11, 12])
# 定义接收器与控制点的距离差
dP = np.array([-1, 2, 3])
# 定义观测值与距离差的关系矩阵
A = np.array([[-1, 0, 0],
[0, 2, 0],
[0, 0, 3]])
# 求解接收器的坐标
X_ = X - np.linalg.inv(A.T @ A) @ A.T @ dP
print("接收器的坐标为:", X_)在以上代码示例中,我们首先定义了控制点的坐标矩阵X和接收器的观测值矩阵P。然后通过观测值与距离差的关系矩阵A,利用最小二乘法求解接收器的坐标X_。
这只是静态定位的一个简单示例,实际应用中还需要考虑众多因素,如卫星系统误差、大气延迟等。但是基于以上的原理和步骤,静态定位可以实现对目标点的精确测量和定位。
总结起来,静态定位测量原理的基本概念是通过控制点的坐标和接收器接收到的卫星信号来计算目标点的位置。其核心原理是利用卫星信号的到达时间差来计算距离差,然后利用差分模型进行计算,求解接收器的位置。希望以上的介绍能够对静态定位的概念和实现原理有所帮助。
以上是静态定位测量的基本原理和概念是什么?的详细内容。更多信息请关注PHP中文网其他相关文章!

 趣谈ChatGPT原理及算法Apr 27, 2023 pm 08:46 PM
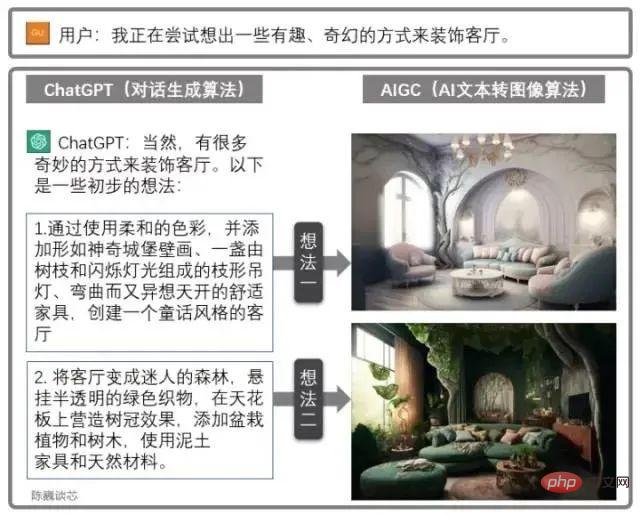
趣谈ChatGPT原理及算法Apr 27, 2023 pm 08:46 PM去年12月1日,OpenAI推出人工智能聊天原型ChatGPT,再次赚足眼球,为AI界引发了类似AIGC让艺术家失业的大讨论。ChatGPT是一种专注于对话生成的语言模型。它能够根据用户的文本输入,产生相应的智能回答。这个回答可以是简短的词语,也可以是长篇大论。其中GPT是GenerativePre-trainedTransformer(生成型预训练变换模型)的缩写。通过学习大量现成文本和对话集合(例如Wiki),ChatGPT能够像人类那样即时对话,流畅的回答各种问题。(当然回答速度比人还是
 深入解析MySQL MVCC 原理与实现Sep 09, 2023 pm 08:07 PM
深入解析MySQL MVCC 原理与实现Sep 09, 2023 pm 08:07 PM深入解析MySQLMVCC原理与实现MySQL是目前最流行的关系型数据库管理系统之一,它提供了多版本并发控制(MultiversionConcurrencyControl,MVCC)机制来支持高效并发处理。MVCC是一种在数据库中处理并发事务的方法,可以提供高并发和隔离性。本文将深入解析MySQLMVCC的原理与实现,并结合代码示例进行说明。一、M
 深入解析Struts2框架的工作原理与实现方式Jan 05, 2024 pm 04:08 PM
深入解析Struts2框架的工作原理与实现方式Jan 05, 2024 pm 04:08 PM解读Struts2框架的原理及实现方式引言:Struts2作为一种流行的MVC(Model-View-Controller)框架,被广泛应用于JavaWeb开发中。它提供了一种将Web层与业务逻辑层分离的方式,并且具有灵活性和可扩展性。本文将介绍Struts2框架的基本原理和实现方式,同时提供一些具体的代码示例来帮助读者更好地理解该框架。一、框架原理:St
 Golang实现继承方法的基本原理和方式Jan 20, 2024 am 09:11 AM
Golang实现继承方法的基本原理和方式Jan 20, 2024 am 09:11 AMGolang继承方法的基本原理与实现方式在Golang中,继承是面向对象编程的重要特性之一。通过继承,我们可以使用父类的属性和方法,从而实现代码的复用和扩展性。本文将介绍Golang继承方法的基本原理和实现方式,并提供具体的代码示例。继承方法的基本原理在Golang中,继承是通过嵌入结构体的方式实现的。当一个结构体嵌入另一个结构体时,被嵌入的结构体就拥有了嵌
 深入探究Maven生命周期的功能和机制Jan 04, 2024 am 09:09 AM
深入探究Maven生命周期的功能和机制Jan 04, 2024 am 09:09 AM深入理解Maven生命周期的作用与原理Maven是一款非常流行的项目管理工具,它使用一种灵活的构建模型来管理项目的构建、测试和部署等任务。Maven的核心概念之一就是生命周期(Lifecycle),它定义了一系列阶段(Phase)和每个阶段的目标(Goal),帮助开发人员和构建工具按照预定的顺序执行相关操作。Maven的生命周期主要分为三套:Clean生命周
 PHP 防抖和防重复提交技术的原理与应用Oct 12, 2023 pm 12:16 PM
PHP 防抖和防重复提交技术的原理与应用Oct 12, 2023 pm 12:16 PMPHP防抖和防重复提交技术的原理与应用随着互联网的发展,用户在进行网页操作时,往往会出现频繁点击或重复提交的情况,这会给系统带来一定的负担和安全隐患。为了解决这一问题,开发人员通常会采用防抖和防重复提交技术。本文将介绍PHP中防抖和防重复提交技术的原理,并给出相应的代码示例。一、防抖技术的原理与应用防抖技术旨在解决用户频繁点击或操作的问题,通过延迟执行或合
 深入理解Java反射机制的原理与应用Dec 23, 2023 am 09:09 AM
深入理解Java反射机制的原理与应用Dec 23, 2023 am 09:09 AM深入理解Java反射机制的原理与应用一、反射机制的概念与原理反射机制是指在程序运行时动态地获取类的信息、访问和操作类的成员(属性、方法、构造方法等)的能力。通过反射机制,我们可以在程序运行时动态地创建对象、调用方法和访问属性,而不需要在编译时知道类的具体信息。反射机制的核心是java.lang.reflect包中的类和接口。其中,Class类代表一个类的字节
 了解PHP底层开发原理:基础知识和概念介绍Sep 10, 2023 pm 02:31 PM
了解PHP底层开发原理:基础知识和概念介绍Sep 10, 2023 pm 02:31 PM了解PHP底层开发原理:基础知识和概念介绍作为一名PHP开发者,了解PHP底层开发原理是非常重要的。正因为如此,本文将介绍PHP底层开发的基础知识和概念,帮助读者更好地理解和应用PHP。一、什么是PHP?PHP(全称:HypertextPreprocessor)是一门开源的脚本语言,主要用于Web开发。它可以嵌入到HTML文档中,通过服务器解释执行,并生成


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

EditPlus 中文破解版
体积小,语法高亮,不支持代码提示功能

Dreamweaver Mac版
视觉化网页开发工具

ZendStudio 13.5.1 Mac
功能强大的PHP集成开发环境

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

