
LightSim:NeurIPS 2023推出的自动驾驶光照仿真平台,实现真实、可控和可拓展的模拟体验

- WBOY转载
- 2023-12-15 16:22:011403浏览
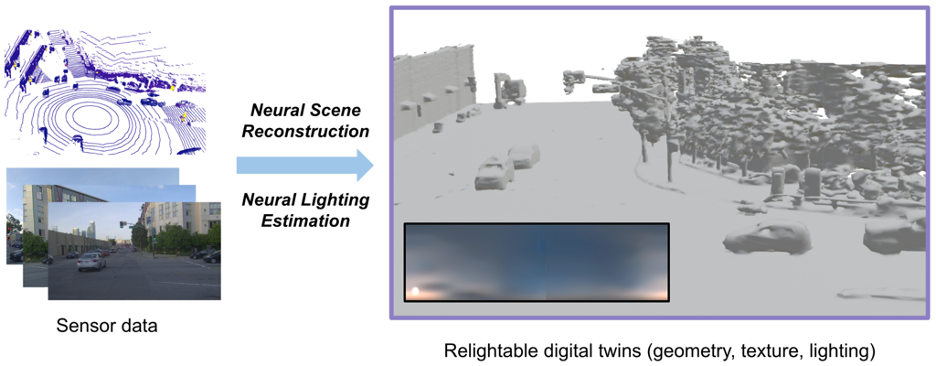
最近,来自 Waabi AI、多伦多大学、滑铁卢大学和麻省理工的研究者们在 NeurIPS 2023 上提出了一种全新的自动驾驶光照仿真平台 LightSim。研究者们提出了从真实数据中生成配对的光照训练数据的方法,解决了数据缺失和模型迁移损失的问题。LightSim 利用神经辐射场(NeRF)和基于物理的深度网络渲染车辆驾驶视频,首次在大规模真实数据上实现了动态场景的光照仿真。
项目网站:https://waabi.ai/lightsim 论文链接:https://openreview.net/pdf?id=mcx8IGneYw
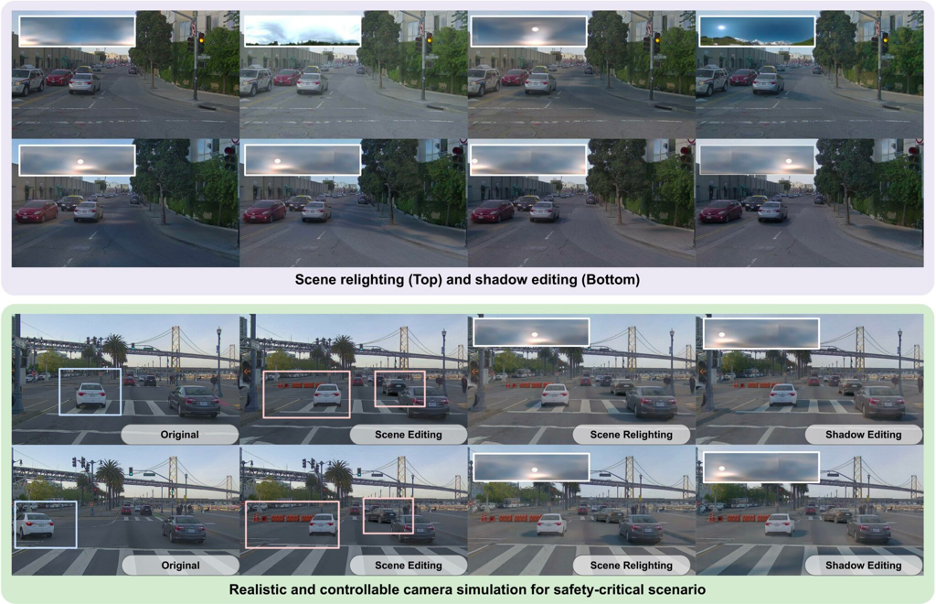
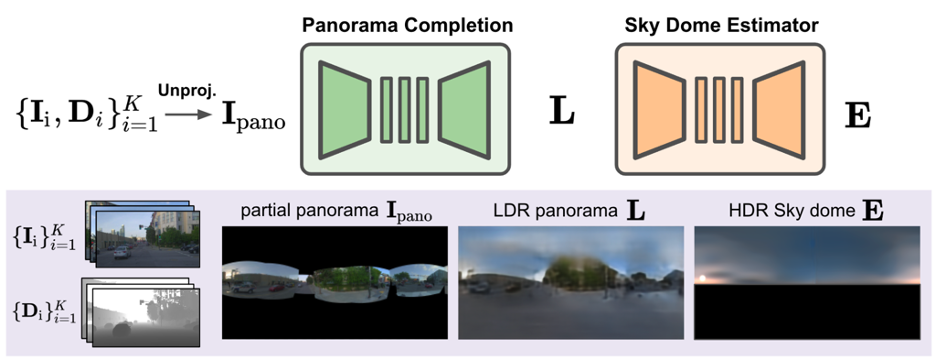
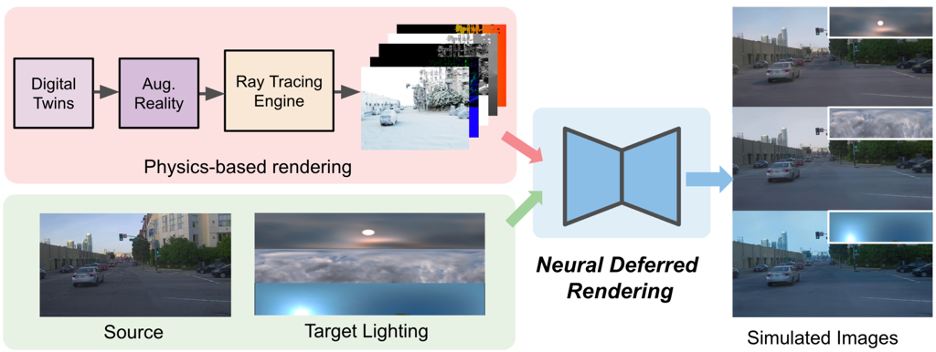
 LightSim 可以批量地进行场景重新照明,从估计的和真实的 HDR 环境图中生成同一场景的新的时间一致的和可 3D 感知的照明变化。
LightSim 可以批量地进行场景重新照明,从估计的和真实的 HDR 环境图中生成同一场景的新的时间一致的和可 3D 感知的照明变化。 
 LightSim 也可以批量地进行阴影编辑。
LightSim 也可以批量地进行阴影编辑。 


 以下视频中展示了另一个实例,插入了新的道路障碍后,又添加了一组新的车辆。使用 LightSim 搭建的仿真光照,让新加入的车辆能够无缝地融入到场景中。
以下视频中展示了另一个实例,插入了新的道路障碍后,又添加了一组新的车辆。使用 LightSim 搭建的仿真光照,让新加入的车辆能够无缝地融入到场景中。 
以上是LightSim:NeurIPS 2023推出的自动驾驶光照仿真平台,实现真实、可控和可拓展的模拟体验的详细内容。更多信息请关注PHP中文网其他相关文章!
声明:
本文转载于:jiqizhixin.com。如有侵权,请联系admin@php.cn删除