


通用足式机器人公司的LimX Dynamics公司正式发布了他们的首款全自研产品「四轮足机器人W1」。这款产品是基于逐际动力公司的「运动智能Motion Intelligence」开发的,它搭载了全球顶尖的感知和运动控制算法,将腿式和轮式结构的优势融合在一起。同时,它还配备了多款全自研的高性能关节,实现了强大的实时地形感知和全地形移动能力,大大提高了足式机器人的作业能力。通过这款四轮足机器人W1,逐际动力公司瞄准了中国潜力巨大的空白市场,并抓住了先机,为工业巡检、物流配送、特种作业、科研教育等B端客户带来了直击痛点的应用体验。逐际动力W1将于今年第四季度开始接受预订

逐际动力发布首款四轮足机器人W1
W1四轮足机器人具备颠覆性的技术和产品能力
针对通用足式机器人,逐际动力全自研高性能关节,让W1得以把四腿和四轮相结合的复合能力发挥到极致,实现了高动态运动与全地形越障能力,比单纯的四足机器人更加高效、敏捷,更适用于大部分的落地应用场景。
搭载逐际动力基于感知的运动控制等核心算法,W1成功攻克了楼梯等难度极高的离散地形,能够覆盖绝大多数非轮式的复杂场景,是中国首个基于自主地形感知,通过实时步态规划与控制,完成上下楼梯的四轮足产品。
得益于天生的形态优势和一流的软硬件能力,W1具备了出色的移动效率、负载能力和续航里程,真正满足客户现实的使用要求。

W1是一款具备出色运动能力的四轮足机器人
目前,逐际动力四轮足机器人W1已成功通过多个复杂应用场景的能力验证,为落地应用做好充分的准备。
- 高动态运动:全自研高性能关节,释放出四轮足复杂结构的超级运动能力
- 上下楼梯:融合感知的运动控制,实现了轮足稳定踏步上下楼梯
- 上下斜坡:身体与斜坡面、地面皆可保持水平,按需灵活切换
- 马路牙子:灵活自由切换运动步态,轻松应对各类不同离散地形的挑战
- 伏地穿越:在高速运动过程中,自由调整身体高度,适应不同作业环境的需求
- 单边桥:让机器人适应地形,而不是地形适应机器人,不管地形如何变化,始终做到如履平地
- 草地石板路:通过颠簸路面时,腿部多关节快速协同响应,降低机身姿态波动
- 碎石路:巧妙的轮足结构可踏可滚,兼顾了足式的高通过性和轮式的高效率

W1四轮足机器人在多个复杂应用场景中成功通过能力验证
四轮足机器人需要具备几乎与四足机器人相同的能力,但是轮足混合带来的感知干扰、状态估计和运动控制的挑战却成倍增加,全球尚无成熟的解决方案,难度极大。为了充分发挥轮足这一复合形态的优势,必须解决学术界和产业界长期面临的难题
逐际动力全方位掌握足式机器人运动智能的核心技术,利用在地形感知、强化学习、多刚体动力学、混杂动力学、模型预测控制等领域的学术和研发经验,建立领先的感知与控制融合的算法框架,实现更高稳定性、更强实时性的控制能力。
要实现从样机到产品的飞跃,做好机器人与环境的实时交互尤为关键,逐际动力从创立之初便把感知能力与运动控制的结合作为核心技术进行攻关,并根据软件算法定义硬件,全自研高性能关节,让四轮足机器人优异的物理运动能力得以充分发挥。
逐际动力创始人张巍博士表示:“通用足式机器人正处于技术爆发期,基础研究与商业化的交集已经出现,并不断扩大,我们在恰当的时机,选择四轮足机器人W1作为首款主打产品,打造具有全地形移动能力的高效通用底盘。这是一款破冰的产品,锚定了接下来技术、应用和市场最佳的交集点,通过一流的技术,让长期困扰很多足式机器人落地的难题得以解决,让足式机器人真正走进产业,创造价值。”
以上是「逐际动力」发布首款四轮足机器人,以运动智能突破足式产品的落地和应用的详细内容。更多信息请关注PHP中文网其他相关文章!

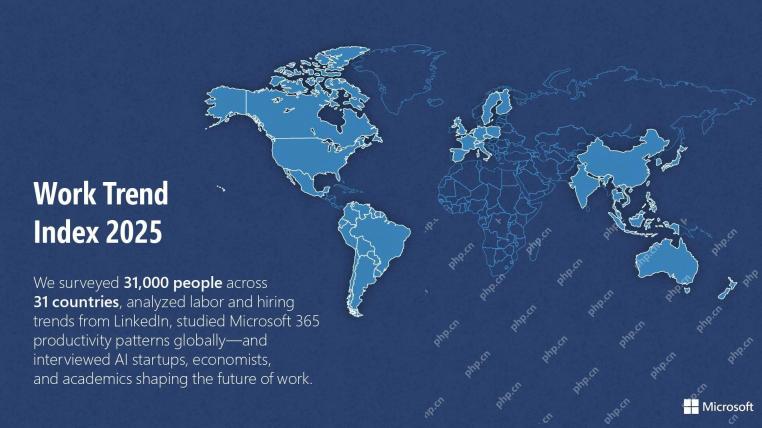 微软工作趋势指数2025显示工作场所容量应变Apr 24, 2025 am 11:19 AM
微软工作趋势指数2025显示工作场所容量应变Apr 24, 2025 am 11:19 AM由于AI的快速整合而加剧了工作场所的迅速危机危机,要求战略转变以外的增量调整。 WTI的调查结果强调了这一点:68%的员工在工作量上挣扎,导致BUR
 AI可以理解吗?中国房间的论点说不,但是对吗?Apr 24, 2025 am 11:18 AM
AI可以理解吗?中国房间的论点说不,但是对吗?Apr 24, 2025 am 11:18 AM约翰·塞尔(John Searle)的中国房间论点:对AI理解的挑战 Searle的思想实验直接质疑人工智能是否可以真正理解语言或具有真正意识。 想象一个人,对下巴一无所知
 中国的'智能” AI助手回应微软召回的隐私缺陷Apr 24, 2025 am 11:17 AM
中国的'智能” AI助手回应微软召回的隐私缺陷Apr 24, 2025 am 11:17 AM与西方同行相比,中国的科技巨头在AI开发方面的课程不同。 他们不专注于技术基准和API集成,而是优先考虑“屏幕感知” AI助手 - AI T
 Docker将熟悉的容器工作流程带到AI型号和MCP工具Apr 24, 2025 am 11:16 AM
Docker将熟悉的容器工作流程带到AI型号和MCP工具Apr 24, 2025 am 11:16 AMMCP:赋能AI系统访问外部工具 模型上下文协议(MCP)让AI应用能够通过标准化接口与外部工具和数据源交互。由Anthropic开发并得到主要AI提供商的支持,MCP允许语言模型和智能体发现可用工具并使用合适的参数调用它们。然而,实施MCP服务器存在一些挑战,包括环境冲突、安全漏洞以及跨平台行为不一致。 Forbes文章《Anthropic的模型上下文协议是AI智能体发展的一大步》作者:Janakiram MSVDocker通过容器化解决了这些问题。基于Docker Hub基础设施构建的Doc
 使用6种AI街头智能策略来建立一家十亿美元的创业Apr 24, 2025 am 11:15 AM
使用6种AI街头智能策略来建立一家十亿美元的创业Apr 24, 2025 am 11:15 AM有远见的企业家采用的六种策略,他们利用尖端技术和精明的商业敏锐度来创造高利润的可扩展公司,同时保持控制权。本指南是针对有抱负的企业家的,旨在建立一个
 Google照片更新解锁了您所有图片的惊人Ultra HDRApr 24, 2025 am 11:14 AM
Google照片更新解锁了您所有图片的惊人Ultra HDRApr 24, 2025 am 11:14 AMGoogle Photos的新型Ultra HDR工具:改变图像增强的游戏规则 Google Photos推出了一个功能强大的Ultra HDR转换工具,将标准照片转换为充满活力的高动态范围图像。这种增强功能受益于摄影师
 Descope建立AI代理集成的身份验证框架Apr 24, 2025 am 11:13 AM
Descope建立AI代理集成的身份验证框架Apr 24, 2025 am 11:13 AM技术架构解决了新兴的身份验证挑战 代理身份集线器解决了许多组织仅在开始AI代理实施后发现的问题,即传统身份验证方法不是为机器设计的
 Google Cloud Next 2025以及现代工作的未来Apr 24, 2025 am 11:12 AM
Google Cloud Next 2025以及现代工作的未来Apr 24, 2025 am 11:12 AM(注意:Google是我公司的咨询客户,Moor Insights&Strateging。) AI:从实验到企业基金会 Google Cloud Next 2025展示了AI从实验功能到企业技术的核心组成部分的演变,


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

安全考试浏览器
Safe Exam Browser是一个安全的浏览器环境,用于安全地进行在线考试。该软件将任何计算机变成一个安全的工作站。它控制对任何实用工具的访问,并防止学生使用未经授权的资源。

Atom编辑器mac版下载
最流行的的开源编辑器

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

SublimeText3汉化版
中文版,非常好用

SecLists
SecLists是最终安全测试人员的伙伴。它是一个包含各种类型列表的集合,这些列表在安全评估过程中经常使用,都在一个地方。SecLists通过方便地提供安全测试人员可能需要的所有列表,帮助提高安全测试的效率和生产力。列表类型包括用户名、密码、URL、模糊测试有效载荷、敏感数据模式、Web shell等等。测试人员只需将此存储库拉到新的测试机上,他就可以访问到所需的每种类型的列表。

