



DriveLM是一个基于语言的驱动项目,它包含一个数据集和一个模型。通过DriveLM,我们介绍了自动驾驶(AD)中大型语言模型的推理能力,以做出决策并确保可解释的规划。
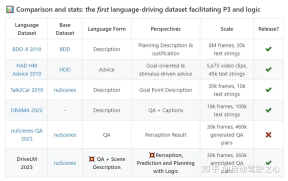
在DriveLM的数据集中,我们将人工书写的推理逻辑作为连接,以促进感知、预测和规划(P3)。在我们的模型中,我们提出了一个具备思维图能力的AD视觉语言模型,以产生更优质的规划结果。目前,我们已经发布了数据集的演示版本,完整的数据集和模型将在未来发布
项目链接:https://github.com/OpenDriveLab/DriveLM 需要重写的内容是:项目链接:https://github.com/OpenDriveLab/DriveLM

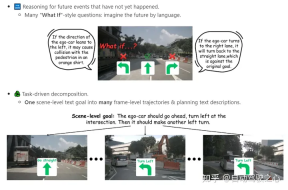
What is Graph-of-Thoughts in AD?
数据集最令人兴奋的方面是,P3中的问答(QA)以图形风格的结构连接,QA对作为每个节点,对象的关系作为边。
相较于纯语言的思维树或思维图,我们更倾向于多模态。在AD域中,我们之所以这样做,是因为每个阶段都定义了AD任务,从原始传感器输入到最终控制动作
DriveLM数据集中包含什么?
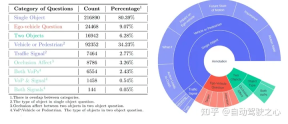
基于主流的nuScenes数据集构建我们的数据集。DriveLM最核心的元素是基于帧的P3 QA。感知问题需要模型识别场景中的对象。预测问题要求模型预测场景中重要对象的未来状态。规划问题促使模型给出合理的规划行动,避免危险的行动。
标定过程如何?
- 关键帧选择。给定一个剪辑中的所有帧,注释器将选择需要注释的关键帧。标准是,这些框架应该涉及自车运动状态的变化(变道、突然停车、停车后启动等)。
- 关键对象选择。给定关键帧,注释器需要拾取周围六个图像中的关键对象。标准是这些物体应该能够影响自车(交通信号灯、过街行人、其他车辆)
- 问答注释。给定这些关键对象,我们会自动生成关于感知、预测和规划的单个或多个对象的问题。更多细节可以在我们的演示数据中找到。
以上是大模型「上车」关键一步:全球首个语言+自动驾驶开源数据集来了的详细内容。更多信息请关注PHP中文网其他相关文章!

 Gemma范围:Google'用于凝视AI的显微镜Apr 17, 2025 am 11:55 AM
Gemma范围:Google'用于凝视AI的显微镜Apr 17, 2025 am 11:55 AM使用Gemma范围探索语言模型的内部工作 了解AI语言模型的复杂性是一个重大挑战。 Google发布的Gemma Scope是一种综合工具包,为研究人员提供了一种强大的探索方式
 谁是商业智能分析师以及如何成为一位?Apr 17, 2025 am 11:44 AM
谁是商业智能分析师以及如何成为一位?Apr 17, 2025 am 11:44 AM解锁业务成功:成为商业智能分析师的指南 想象一下,将原始数据转换为驱动组织增长的可行见解。 这是商业智能(BI)分析师的力量 - 在GU中的关键作用
 如何在SQL中添加列? - 分析VidhyaApr 17, 2025 am 11:43 AM
如何在SQL中添加列? - 分析VidhyaApr 17, 2025 am 11:43 AMSQL的Alter表语句:动态地将列添加到数据库 在数据管理中,SQL的适应性至关重要。 需要即时调整数据库结构吗? Alter表语句是您的解决方案。本指南的详细信息添加了Colu
 业务分析师与数据分析师Apr 17, 2025 am 11:38 AM
业务分析师与数据分析师Apr 17, 2025 am 11:38 AM介绍 想象一个繁华的办公室,两名专业人员在一个关键项目中合作。 业务分析师专注于公司的目标,确定改进领域,并确保与市场趋势保持战略一致。 simu
 什么是Excel中的Count和Counta? - 分析VidhyaApr 17, 2025 am 11:34 AM
什么是Excel中的Count和Counta? - 分析VidhyaApr 17, 2025 am 11:34 AMExcel 数据计数与分析:COUNT 和 COUNTA 函数详解 精确的数据计数和分析在 Excel 中至关重要,尤其是在处理大型数据集时。Excel 提供了多种函数来实现此目的,其中 COUNT 和 COUNTA 函数是用于在不同条件下统计单元格数量的关键工具。虽然这两个函数都用于计数单元格,但它们的设计目标却针对不同的数据类型。让我们深入了解 COUNT 和 COUNTA 函数的具体细节,突出它们独特的特性和区别,并学习如何在数据分析中应用它们。 要点概述 理解 COUNT 和 COU
 Chrome在这里与AI:每天都有新事物!Apr 17, 2025 am 11:29 AM
Chrome在这里与AI:每天都有新事物!Apr 17, 2025 am 11:29 AMGoogle Chrome的AI Revolution:个性化和高效的浏览体验 人工智能(AI)正在迅速改变我们的日常生活,而Google Chrome正在领导网络浏览领域的负责人。 本文探讨了兴奋
 AI的人类方面:福祉和四人底线Apr 17, 2025 am 11:28 AM
AI的人类方面:福祉和四人底线Apr 17, 2025 am 11:28 AM重新构想影响:四倍的底线 长期以来,对话一直以狭义的AI影响来控制,主要集中在利润的最低点上。但是,更全面的方法认识到BU的相互联系
 您应该知道的5个改变游戏规则的量子计算用例Apr 17, 2025 am 11:24 AM
您应该知道的5个改变游戏规则的量子计算用例Apr 17, 2025 am 11:24 AM事情正稳步发展。投资投入量子服务提供商和初创企业表明,行业了解其意义。而且,越来越多的现实用例正在出现以证明其价值超出


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

Atom编辑器mac版下载
最流行的的开源编辑器

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

SecLists
SecLists是最终安全测试人员的伙伴。它是一个包含各种类型列表的集合,这些列表在安全评估过程中经常使用,都在一个地方。SecLists通过方便地提供安全测试人员可能需要的所有列表,帮助提高安全测试的效率和生产力。列表类型包括用户名、密码、URL、模糊测试有效载荷、敏感数据模式、Web shell等等。测试人员只需将此存储库拉到新的测试机上,他就可以访问到所需的每种类型的列表。

VSCode Windows 64位 下载
微软推出的免费、功能强大的一款IDE编辑器

