


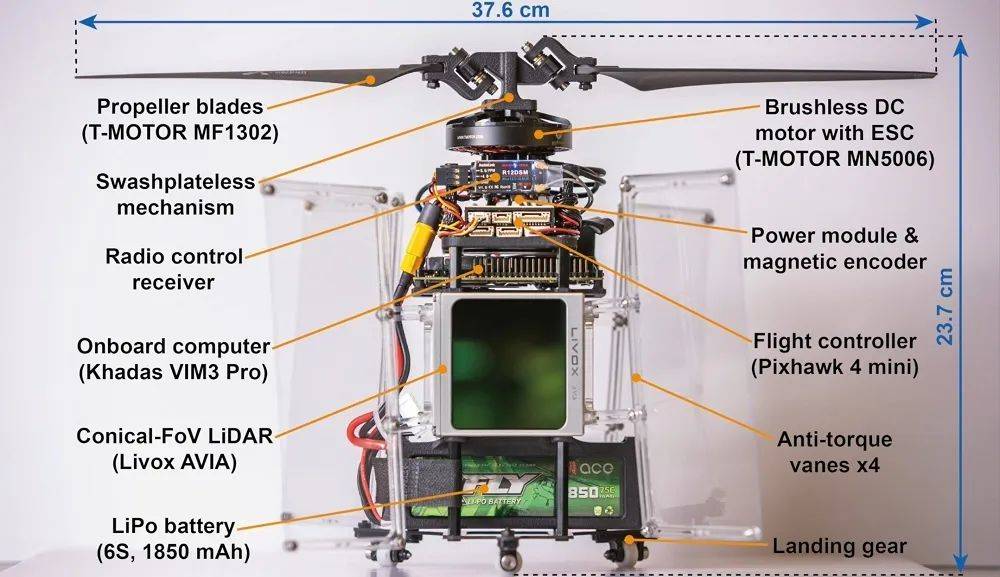
PULSAR 的结构图
【环球网无人机综合报道】香港大学消息,最近,香港大学(港大) 工程学院机械工程系助理教授张富博士所领导的团队,最新设计出一种利用动力飞行而不需要驱动雷达传感的无人机,名为“脉冲星 ”(PULSAR)。“脉冲星”具备感知及建图等多种功能,仿如将科幻电影《普罗米修斯》中,人类利用自旋探测器实时构建洞穴的三维地图的场景成为现实。
据报道,无人机在搜救、洞穴勘查以及建筑绘图等多个领域中的重要性逐渐增加。张博士的团队以自旋运动为研究核心,“脉冲星 ”利用动力飞行、不需要驱动雷达传感,因其自旋运动和激光雷达光束的扫瞄模式,与天文学上的脉冲星在直觉上十分相似而命名。“脉冲星 ”配备了微型机载计算机和激光雷达,实现了完全自主的感知、建图、规划和控制,无论在室内还是室外环境都不需要外部设备辅助。单执行器在脉冲星上用于驱动无斜盘机构,能够同时产生推力和转矩。
张博士的团队利用“脉冲星 ”,在环境探索和多方向动态避障方面进行了实验,结果显示它可以在不依赖任何外部设备辅助的情况下,在未知环境中执行自主导航并且实时探测环境中的静态和动态障碍物。
“脉冲星”具备在夜间进行全自动导航的能力,表明其航行性能不受光照条件限制。此外,它能应对外部风扰。即使遭受每秒4.5米的最大风速干扰,“脉冲星”仍能在一个较小的范围内保持悬停位置。这些特性使飞行器在野外环境中更加安全及稳定。
传感器还可以通过内在的自旋运动来增加视场范围,从而提高无人机的感知能力和任务效率,除了上述的能力。目前有两种主要的方法用于拓展传感器的视场,它们共同的特点是整体功耗较高。一种可采用的方法是运用大视场的传感器,例如鱼眼镜头、反射型相机或者360度激光雷达。然而鱼眼相机和自反射相机往往会存在显著的变形,360度激光雷达在竖直方向上的视场仍然较窄且分辨率较低。另一种方法是同时使用多个传感器,如多相机系统或多激光雷达系统,可是多传感器系统会带来额外的成本和较长的数据处理时间。同样,采用云台系统去拓展视场也会带来相似的问题。
张博士的团队发现“脉冲星 ”与具有相同桨叶面积和载荷的四旋翼无人机相比,它能够节省26.7%的能量消耗,同时保持良好的灵活性。脉冲星的动力系统采用单执行器,能够实现更高的能量转化效率,整体效率可达每瓦6.65克。仅凭借直径只有37.6厘米的螺旋桨和容量为41瓦时的小容量电池,这个重达1234克的无人机实现了超过12分钟的悬停时间。如果替换激光雷达为更大的桨叶和电池,"脉冲星"的悬停时间可延长超过40分钟。
研究成果已发表在《科学·机器人学》(Science Robotics)上,文章标题为“A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation”并获刊登在《科学》网站首页图片。
张博士表示其团队建立的研究平台有利于更深入地研究自旋无人机,“我们认为该平台的建立将有利于探究高速旋转下的无人机控制方法和剧烈运动下的同时定位与建图(SLAM)技术。”
以上是洞穴探险神器?可自主导航的单旋翼自旋无人机,效率更高!的详细内容。更多信息请关注PHP中文网其他相关文章!

 您必须在无知的面纱后面建立工作场所Apr 29, 2025 am 11:15 AM
您必须在无知的面纱后面建立工作场所Apr 29, 2025 am 11:15 AM在约翰·罗尔斯1971年具有开创性的著作《正义论》中,他提出了一种思想实验,我们应该将其作为当今人工智能设计和使用决策的核心:无知的面纱。这一理念为理解公平提供了一个简单的工具,也为领导者如何利用这种理解来公平地设计和实施人工智能提供了一个蓝图。 设想一下,您正在为一个新的社会制定规则。但有一个前提:您事先不知道自己在这个社会中将扮演什么角色。您最终可能富有或贫穷,健康或残疾,属于多数派或边缘少数群体。在这种“无知的面纱”下运作,可以防止规则制定者做出有利于自身的决策。相反,人们会更有动力制定公
 决策,决策……实用应用AI的下一步Apr 29, 2025 am 11:14 AM
决策,决策……实用应用AI的下一步Apr 29, 2025 am 11:14 AM许多公司专门从事机器人流程自动化(RPA),提供机器人以使重复性任务自动化 - UIPATH,在任何地方自动化,蓝色棱镜等。 同时,过程采矿,编排和智能文档处理专业
 代理人来了 - 更多关于我们将在AI合作伙伴旁边做什么Apr 29, 2025 am 11:13 AM
代理人来了 - 更多关于我们将在AI合作伙伴旁边做什么Apr 29, 2025 am 11:13 AMAI的未来超越了简单的单词预测和对话模拟。 AI代理人正在出现,能够独立行动和任务完成。 这种转变已经在诸如Anthropic的Claude之类的工具中很明显。 AI代理:研究
 为什么同情在AI驱动的未来中对领导者更重要Apr 29, 2025 am 11:12 AM
为什么同情在AI驱动的未来中对领导者更重要Apr 29, 2025 am 11:12 AM快速的技术进步需要对工作未来的前瞻性观点。 当AI超越生产力并开始塑造我们的社会结构时,会发生什么? Topher McDougal即将出版的书Gaia Wakes:
 用于产品分类的AI:机器可以总税法吗?Apr 29, 2025 am 11:11 AM
用于产品分类的AI:机器可以总税法吗?Apr 29, 2025 am 11:11 AM产品分类通常涉及复杂的代码,例如诸如统一系统(HS)等系统的“ HS 8471.30”,对于国际贸易和国内销售至关重要。 这些代码确保正确的税收申请,影响每个INV
 数据中心的需求会引发气候技术反弹吗?Apr 29, 2025 am 11:10 AM
数据中心的需求会引发气候技术反弹吗?Apr 29, 2025 am 11:10 AM数据中心能源消耗与气候科技投资的未来 本文探讨了人工智能驱动的数据中心能源消耗激增及其对气候变化的影响,并分析了应对这一挑战的创新解决方案和政策建议。 能源需求的挑战: 大型超大规模数据中心耗电量巨大,堪比数十万个普通北美家庭的总和,而新兴的AI超大规模中心耗电量更是数十倍于此。2024年前八个月,微软、Meta、谷歌和亚马逊在AI数据中心建设和运营方面的投资已达约1250亿美元(摩根大通,2024)(表1)。 不断增长的能源需求既是挑战也是机遇。据Canary Media报道,迫在眉睫的电
 AI和好莱坞的下一个黄金时代Apr 29, 2025 am 11:09 AM
AI和好莱坞的下一个黄金时代Apr 29, 2025 am 11:09 AM生成式AI正在彻底改变影视制作。Luma的Ray 2模型,以及Runway的Gen-4、OpenAI的Sora、Google的Veo等众多新模型,正在以前所未有的速度提升生成视频的质量。这些模型能够轻松制作出复杂的特效和逼真的场景,甚至连短视频剪辑和具有摄像机感知的运动效果也已实现。虽然这些工具的操控性和一致性仍有待提高,但其进步速度令人惊叹。 生成式视频正在成为一种独立的媒介形式。一些模型擅长动画制作,另一些则擅长真人影像。值得注意的是,Adobe的Firefly和Moonvalley的Ma
 Chatgpt是否会慢慢成为AI最大的Yes-Man?Apr 29, 2025 am 11:08 AM
Chatgpt是否会慢慢成为AI最大的Yes-Man?Apr 29, 2025 am 11:08 AMChatGPT用户体验下降:是模型退化还是用户期望? 近期,大量ChatGPT付费用户抱怨其性能下降,引发广泛关注。 用户报告称模型响应速度变慢,答案更简短、缺乏帮助,甚至出现更多幻觉。一些用户在社交媒体上表达了不满,指出ChatGPT变得“过于讨好”,倾向于验证用户观点而非提供批判性反馈。 这不仅影响用户体验,也给企业客户带来实际损失,例如生产力下降和计算资源浪费。 性能下降的证据 许多用户报告了ChatGPT性能的显着退化,尤其是在GPT-4(即将于本月底停止服务)等旧版模型中。 这


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

MinGW - 适用于 Windows 的极简 GNU
这个项目正在迁移到osdn.net/projects/mingw的过程中,你可以继续在那里关注我们。MinGW:GNU编译器集合(GCC)的本地Windows移植版本,可自由分发的导入库和用于构建本地Windows应用程序的头文件;包括对MSVC运行时的扩展,以支持C99功能。MinGW的所有软件都可以在64位Windows平台上运行。

SublimeText3 英文版
推荐:为Win版本,支持代码提示!

SublimeText3 Linux新版
SublimeText3 Linux最新版

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)

Atom编辑器mac版下载
最流行的的开源编辑器

