


人类自古以来就梦想着能够研发出可适应多种野外地形的移动机构。轮式移动平台具有较好的运动平稳性和移动效率,但难以在崎岖地形中行进;腿足式机器人具有较好的地形适应能力和移动灵活性,但其运动稳定性和能效有待提高。
为融合轮式移动和腿足移动的优势,轮腿复合式移动机构应用而生。常见的轮腿复合机构主要包括异形轮(如RHex)、辐条轮(如Whegs)、变形轮(如OmniWheg)、轮腿串联(如Wheeled-ANYmal)等,如图X所示。
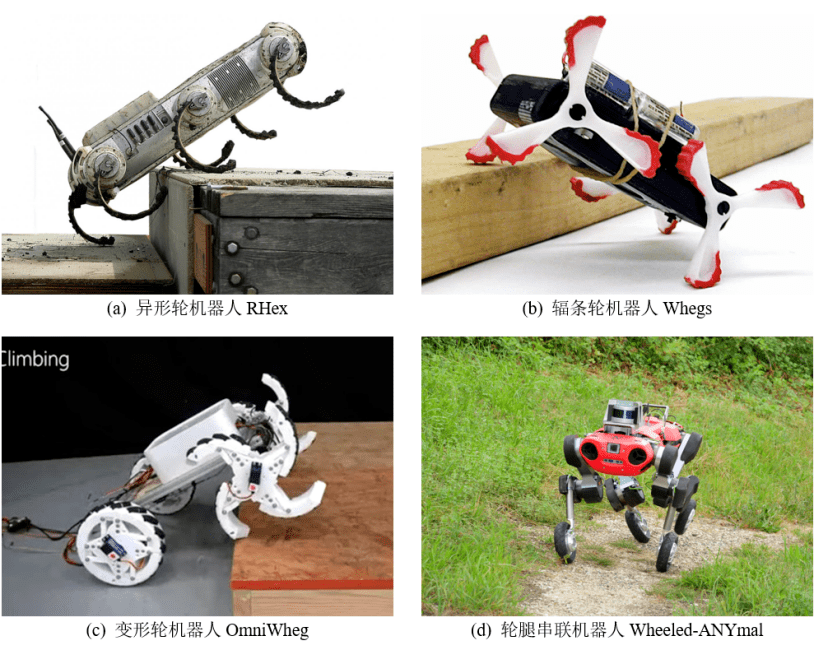
图1 常见轮腿复合式机器人
近日,山东大学李贻斌教授团队联合日本立命馆大学马书根教授、中科院沈阳自动化所刘金国教授和之江实验室孔令雨副研究员,研发出一种新型轮腿复合式机器人,命名为Q-Whex,如图2所示。
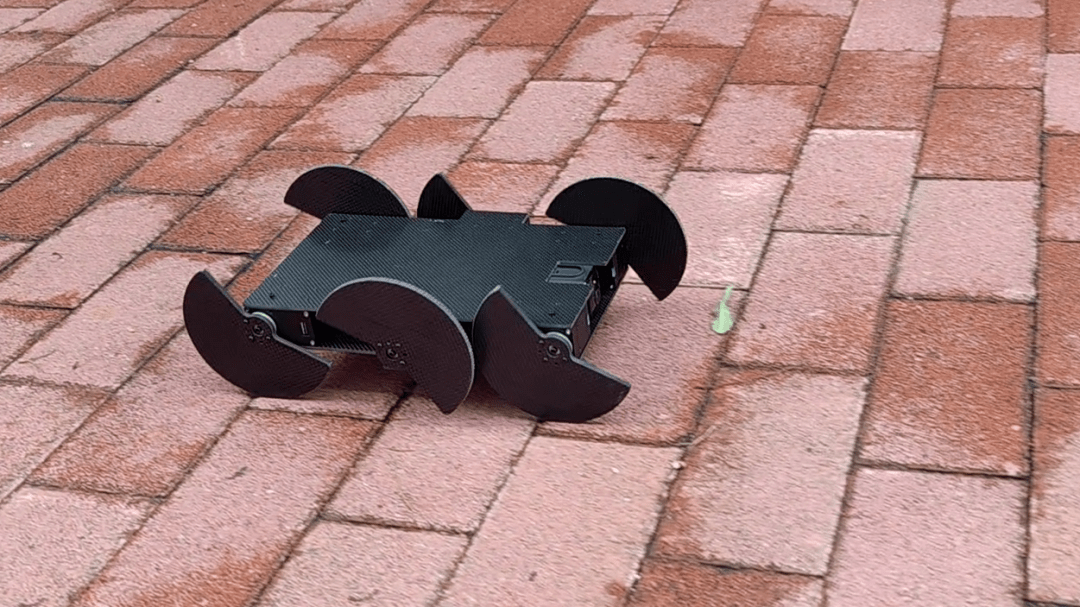
图2 Q-Whex机器人
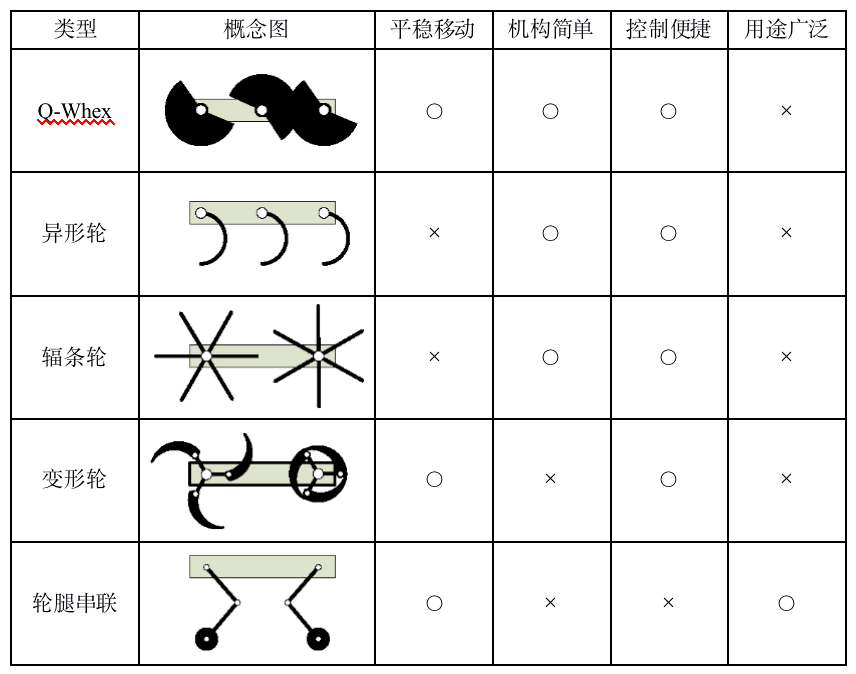
Q-Whex既能够像轮式移动平台一样在平坦地面上平稳地移动,也可以像足式机器人一样翻越高于其底盘高度的障碍物。与其他轮腿复合式移动机器人相比,Q-Whex在运动平稳性、机构复杂度和控制难度等方面均具有优势,如表1所示。
表1 Q-Whex与其他类型轮腿复合式移动机器人对比
该工作以“Q-Whex: A simple and highly mobile quasi-wheeled hexapod robot”为题发表在Journal of Field Robotics期刊上。
▍机构简单,控制便捷
论文中展示的Q-Whex机器人长277.5 mm,宽204.8 mm,高39.5 mm,自重2.4kg,在负重2.65 kg的情况下能够达到0.44 m/s的前进速度。Q-Whex由一个主体和六个同构的扇形半轮驱动系统组成。躯干内部集成了控制电路、IMU、电池、摄像头,轮腿结构的驱动电机也安置于躯干内部;每个半轮呈210°的扇形结构,扇心处连接电机的输出轴实现转动,当扇形的弧边触地时即为轮式移动,当扇形的棱边触地时可实现腿式越障的效果。
Q-Whex的制作和装配非常简单,如图3所示,电机和躯干内部的元件均安装于两块碳纤维板中间,每个扇形半轮也由碳纤维板制成。

图3 Q-Whex分解图
Q-Whex的运动控制也非常容易,各个扇形半轮连续旋转,通过控制机器人左侧扇形半轮与右侧扇形半轮的转速差即可实现转向,通过控制各扇形半轮转角之间的相位差即可生成不同的步态。图4展示了Q-Whex的4种典型步态。
图4 Q-Whex典型步态展示
▍轮腿复合,爬坡越障
Q-Whex采用三角步态可以在平坦地面上像轮式移动平台一样平稳的移动,如图5所示。

图5 Q-Whex在平坦地面上平稳移动
雪地、冰面、砾石等地面,Q-Whex也可以轻松应对,如图6所示。

图6 Q-Whex在多种地面上运行
利用对称步态可以上下32度斜坡,如图7所示。

图7 Q-Whex上32度斜坡
可以攀爬连续台阶,如图8所示。
图8 Q-Whex攀爬连续台阶
各种崎岖地形也不在话下,如图9所示。
图9 Q-Whex在崎岖地形中运行
▍对称构型,无惧翻覆
由于Q-Whex机器人的结构设计在前后、左右和上下三个方向上均采用了对称的构型,因此其在运动过程中没有正反和前后的区别。当机器人在行驶过程中发生意外翻覆后,可以采用“反面向上”的构型继续前行,从而对于在复杂环境运动中的风险和意外情况具有优良的保险性和容错能力。在图10中展示了机器人在攀爬过程中翻倒后采取“背朝上”的姿态完成攀爬。
图10 Q-Whex翻覆后可继续行驶
▍机载摄像,远程探测
小型摄像头设备已被安装在Q-Whex机器人上,并可以通过WiFi或4G网络将采集到的图像实时传输到远程操作端。因此,Q-Whex可以执行无人探测任务,如图11所示。
图11 Q-Whex可采用机载摄像头进行远程探测
还可以远程逗猫,如图12所示。
图12 Q-Whex与猫
Q-Whex本质上是一种新型的轮腿复合移动概念,其高机动性与强通过性源自六个独立驱动的扇形半轮的连续转动与相互间的相位协同。该概念可应用于工业巡检、物流运输、野外探测等所需的移动平台,根据实际应用需求选用合适的构型与尺寸。机器人无需采用复杂的感知或控制策略,其结构与控制上的简捷性进而提升了系统的鲁棒性和可靠性。
论文第一作者为山东大学张国腾副研究员,邮箱:
guoteng@email.sdu.edu.cn。
论文链接:
https://doi.org/10.1002/rob.22186
以上是顶刊发表!山东大学李贻斌教授团队研发出简捷高机动轮腿复合式机器人的详细内容。更多信息请关注PHP中文网其他相关文章!

 易于理解的解释如何登录到chatgpt以及如何用日语开始!May 12, 2025 pm 04:45 PM
易于理解的解释如何登录到chatgpt以及如何用日语开始!May 12, 2025 pm 04:45 PMCHATGPT:从注册到登录和使用应用程序的详尽指南! 近年来,包括Chatgpt在内的AI对我们的生活产生了重大影响。 Chatgpt将注意力吸引为允许自然对话的AI,但是您需要注册一个帐户并登录以使用它。在本文中,我们将以一种易于理解的方式解释初学者,如何注册和登录到chatgpt,如何启动应用程序版本以及故障排除。如果您正在考虑开始使用chatgpt或在注册困难时,请参阅此信息。 目录 登录到chatgpt
![[Openai]什么是O4-Mini?解释主要功能,用法和费用结构](https://img.php.cn/upload/article/001/242/473/174703939398912.jpg?x-oss-process=image/resize,p_40) [Openai]什么是O4-Mini?解释主要功能,用法和费用结构May 12, 2025 pm 04:43 PM
[Openai]什么是O4-Mini?解释主要功能,用法和费用结构May 12, 2025 pm 04:43 PM最新的小型AI型号O4-Mini:高速,低价,高性能! Openai发布了新的小型AI型号O4-Mini。与旗舰型号“ O3”不同,其吸引力是其高速和低价。在本文中,我们将详细解释O4-Mini的特征,其与O3的差异,其使用情况,安全性以及如何使用它。 目录 O4-Mini的概述 关键功能 大约O4米尼高 如何使用和费用结构 API使用和费用 与Azure和GitHub Copilot一起使用
 免费版本和付费版本Chatgpt之间的区别!我们解释了这些功能和使用的示例中的每一个!May 12, 2025 pm 04:41 PM
免费版本和付费版本Chatgpt之间的区别!我们解释了这些功能和使用的示例中的每一个!May 12, 2025 pm 04:41 PMChatGPT:免费版与付费版(ChatGPT Plus)深度对比,助您选出最佳方案! 许多人对ChatGPT强大的对话能力充满兴趣,并开始探索其在日常生活和商业中的应用。然而,即使被ChatGPT吸引,很多人仍然对免费版和付费版(ChatGPT Plus)的区别缺乏充分的了解。 本文将对ChatGPT的免费版和付费版(ChatGPT Plus)进行特性比较,详细解释各自的优势以及根据用途进行选择的最佳方法。付费版提供诸多额外福利,例如更快的响应速度、高峰时段的优先访问权以及新功能的抢先体验。
 我们解释了ChatGPT4和GPT4-O的费用,付款方式,以及如何免费使用它!May 12, 2025 pm 04:40 PM
我们解释了ChatGPT4和GPT4-O的费用,付款方式,以及如何免费使用它!May 12, 2025 pm 04:40 PM对Chatgpt-4的定价计划以及如何免费使用它的详尽说明!选择最佳计划并使用它 我们将以易于理解的方式解释OpenAI的ChatGpt-4(以及GPT-4O/GPT-4 OMNI)的定价结构。我们将全面概述免费计划和付费计划之间的差异,每月20美元计划的功能以及如何免费使用ChatGpt-4。 从选择定价计划到免费使用它,到下载官方应用程序,我们提供了有关如何有效利用ChatGpt-4的信息。 Chatgpt-4O(OMNI)价格 chatgpt-
 在公司中使用ChatGPT的示例!我们还解释了要注意的好处和点May 12, 2025 pm 04:37 PM
在公司中使用ChatGPT的示例!我们还解释了要注意的好处和点May 12, 2025 pm 04:37 PMCHATGPT:公司使用和实施指南的示例 近年来,AI技术的发展非常出色,Chatgpt在聊天机器人和自然语言处理领域引起了很多关注。本文介绍了在公司中使用Chatgpt的具体示例,并解释了实施,风险和有效开发准则的好处。 通过在包括制造,食品,金融,零售和教育在内的各种行业中的例子中探索Chatgpt的可能性。 有关Openai最新AI代理“ OpenAi Deep Research”的更多信息,请单击此处。
 什么是chatgpt 4.5(GPT-4.5)?我们解释了如何使用它,费用和与4O的比较!呢May 12, 2025 pm 04:35 PM
什么是chatgpt 4.5(GPT-4.5)?我们解释了如何使用它,费用和与4O的比较!呢May 12, 2025 pm 04:35 PMOpenAI发布的最新AI模型ChatGPT 4.5 (GPT-4.5) 性能全面提升,具备更自然流畅的对话能力、更强大的推理能力和更高的情商(EQ)。本文将深入探讨GPT-4.5,全面解析其特性。我们将涵盖其主要特点、与GPT-4和GPT-4o的对比、具体功能、定价策略、安全措施以及各种应用案例。 目录 ChatGPT 4.5 (GPT-4.5) 简介 ChatGPT 4.5 (GPT-4.5) 性能详解 无监督学习的扩展 更自然的对话 更高的EQ(同理心) 事实性提升(减少幻觉) 知识库 推
 如何安装chatgpt?我们还解释了与应用程序版本的差异,并要注意注意May 12, 2025 pm 04:32 PM
如何安装chatgpt?我们还解释了与应用程序版本的差异,并要注意注意May 12, 2025 pm 04:32 PMChatgpt作为一个平台越来越受欢迎,允许用户使用AI与他们交谈。它是一种方便的工具,可以从智能手机或计算机访问,可用于多种设备。但是,在安装和使用时,确实有一些事情要小心。 在本文中,我们将以易于理解的方式解释在您的PC或智能手机上安装ChatGpt的步骤,以及在每个设备上要谨慎的观点。如何在PC上安装,如何选择智能手机应用程序,甚至是免费的CHATGPT和付费版本
 如何在智能手机上使用chatgpt!安装方法和点要注意的说明May 12, 2025 pm 04:30 PM
如何在智能手机上使用chatgpt!安装方法和点要注意的说明May 12, 2025 pm 04:30 PMCHATGPT:可用于各种目的的AI助手,智能手机应用程序独有的功能是什么? Chatgpt作为AI助手正在广受欢迎,该AI助手处理了广泛的任务,包括文本生成,翻译和问答。 CHATGPT的智能手机版本具有与Web版本相同的基本功能和UI相同的UI,但它也具有智能手机应用程序独有的功能。另一方面,有一些功能需要Web版本(PC版本)的设置。 在本文中,我们将解释如何在智能手机版本上使用CHATGPT作为iOS/Android,独特功能,与Web版本的差异以及使用应用程序时要注意的指标。


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

禅工作室 13.0.1
功能强大的PHP集成开发环境

MinGW - 适用于 Windows 的极简 GNU
这个项目正在迁移到osdn.net/projects/mingw的过程中,你可以继续在那里关注我们。MinGW:GNU编译器集合(GCC)的本地Windows移植版本,可自由分发的导入库和用于构建本地Windows应用程序的头文件;包括对MSVC运行时的扩展,以支持C99功能。MinGW的所有软件都可以在64位Windows平台上运行。

记事本++7.3.1
好用且免费的代码编辑器

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

Atom编辑器mac版下载
最流行的的开源编辑器

