
一文解读自动驾驶关键技术难点

- 王林转载
- 2023-05-15 11:19:051068浏览
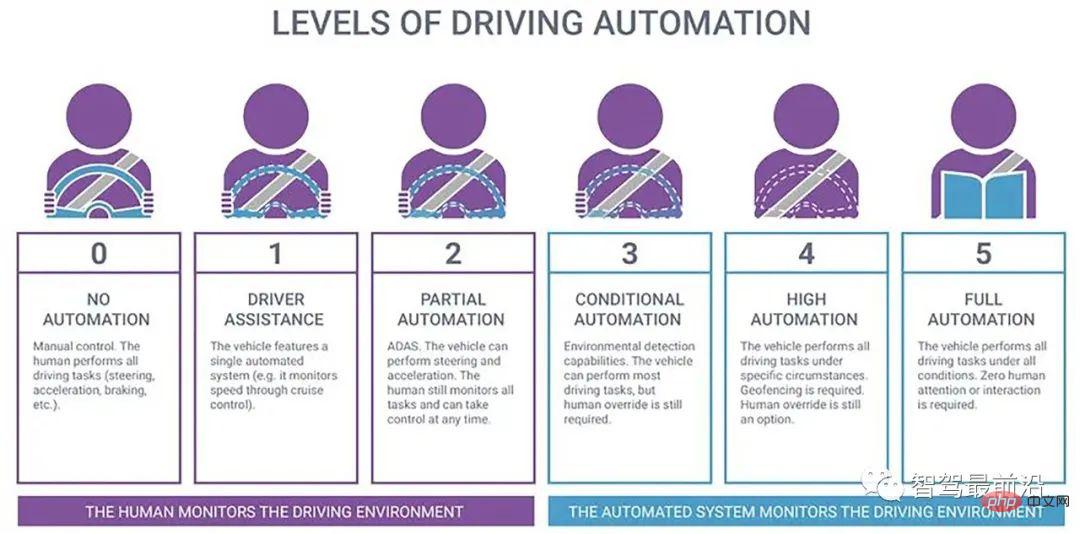
美国汽车工程师协会根据汽车智能化程度将自动驾驶分为L0-L5共6个等级:
-
L0为无自动化(No Automation, NA),即传统汽车,驾驶员执行所有的操作任务,例如转向、制动、加速、减速或泊车等;
-
L1为驾驶辅助(Driving Assistant, DA),即能为驾驶员提供驾驶预警或辅助等,例如对方向盘或加速减速中的一项操作提供支持,其余由驾驶员操作;
-
L2为部分自动化(Partial Automation,PA),车辆对方向盘和加减速中的多项操作提供驾驶,驾驶员负责其他驾驶操作;
-
L3为条件自动化(Conditional Automation,CA),即由自动驾驶系统完成大部分驾驶操作,驾驶员需要集中注意力以备不时之需;
-
L4为高度自动化(High Automation,HA),由车辆完成所有驾驶操作,驾驶员不需要集中注意力,但限定道路和环境条件;
- L5为完全自动化(Full Automation, FA),在任何道路和环境条件下,由自动驾驶系统完成所有的驾驶操作,驾驶员不需要集中注意力。
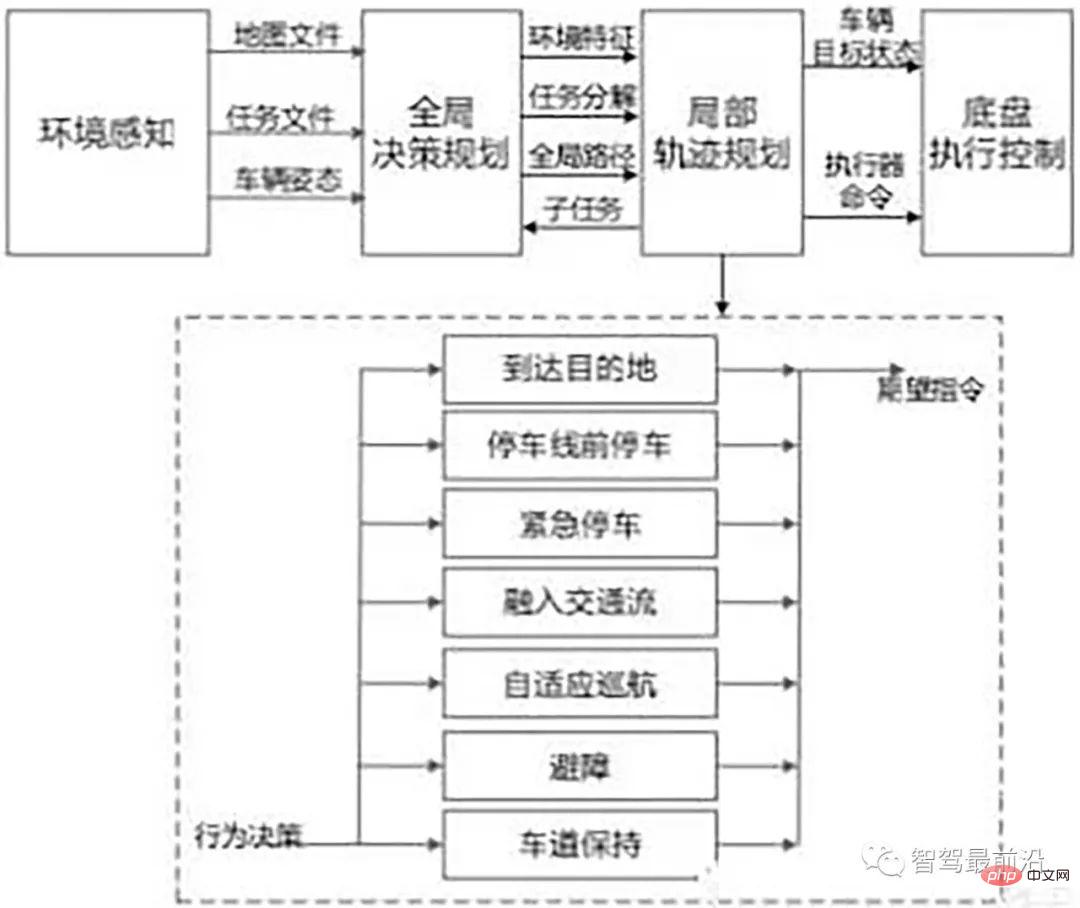
自动驾驶汽车的软硬件架构如图2所示,主要分为环境认知层、决策规划层、控制层和执行层。环境认(感)知层主要通过激光雷达、毫米波雷达、超声波雷达、车载摄像头、夜视系统、GPS、陀螺仪等传感器获取车辆所处环境信息和车辆状态信息,具体来说包括:车道线检测、红绿灯识别、交通标识牌识别、行人检测、车辆检测、障碍物识别和车辆定位等;决策规划层则分为任务规划、行为规划和轨迹规划,根据设定的路线规划、所处的环境和车辆自身状态等规划下一步具体行驶任务(车道保持、换道、跟车、超车、避撞等)、行为(加速、减速、转弯、刹车等)和路径(行驶轨迹);控制层及执行层则基于车辆动力学系统模型对车辆驱动、制动、转向等进行控制,使车辆跟随所制定的行驶轨迹。
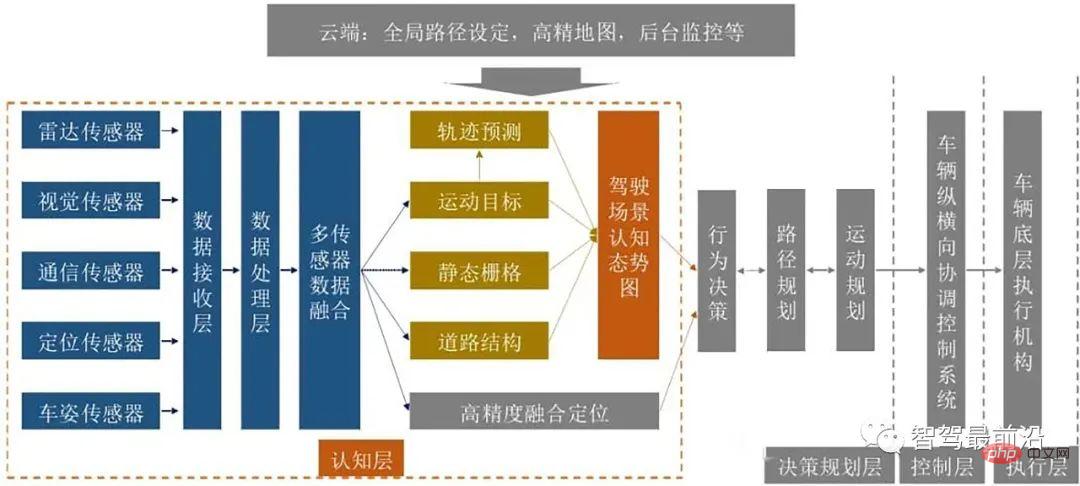
自动驾驶技术涉及较多的关键技术,本文主要介绍环境感知技术、高精度定位技术、决策与规划技术和控制与执行技术。
01 环境感知技术
环境感知指对于环境的场景理解能力,例如障碍物的类型、道路标志及标线、行车车辆的检测、交通信息等数据的语言分类。定位是对感知结果的后处理,通过定位功能从而帮助车辆了解其相对于所处环境的位置。环境感知需要通过传感器获取大量的周围环境信息,确保对车辆周围环境的正确理解,并基于此做出相应的规划和决策。
自动驾驶车辆常用的环境感知传感器包括:摄像头、激光雷达、毫米波雷达、红外线和超声波雷达等。摄像头是自动驾驶车辆最常用、最简单且最接近人眼成像原理的环境感知传感器。通过实时拍摄车辆周围的环境,采用CV技术对所拍摄图像进行分析,实现车辆周围的车辆和行人检测以及交通标志识别等功能。
摄像头的主要优点在于其分辨率高、成本低。但在夜晚、雨雪雾霾等恶劣天气下,摄像头的性能会迅速下降。此外摄像头所能观察的距离有限,不擅长于远距离观察。
毫米波雷达也是自动驾驶车辆常用的一种传感器,毫米波雷达是指工作在毫米波段(波长1-10 mm ,频域30-300GHz)的雷达,其基于ToF技术(Time of Flight)对目标物体进行检测。毫米波雷达向外界连续发送毫米波信号,并接收目标返回的信号,根据信号发出与接收之间的时间差确定目标与车辆之间的距离。因此,毫米波雷达主要用于避免汽车与周围物体发生碰撞,如盲点检测、避障辅助、泊车辅助、自适应巡航等。毫米波雷达的抗干扰能力强,对降雨、沙尘、烟雾等离子的穿透能力要比激光和红外强很多,可全天候工作。但其也具有信号衰减大、容易受到建筑物、人体等的阻挡,传输距离较短,分辨率不高,难以成像等不足。
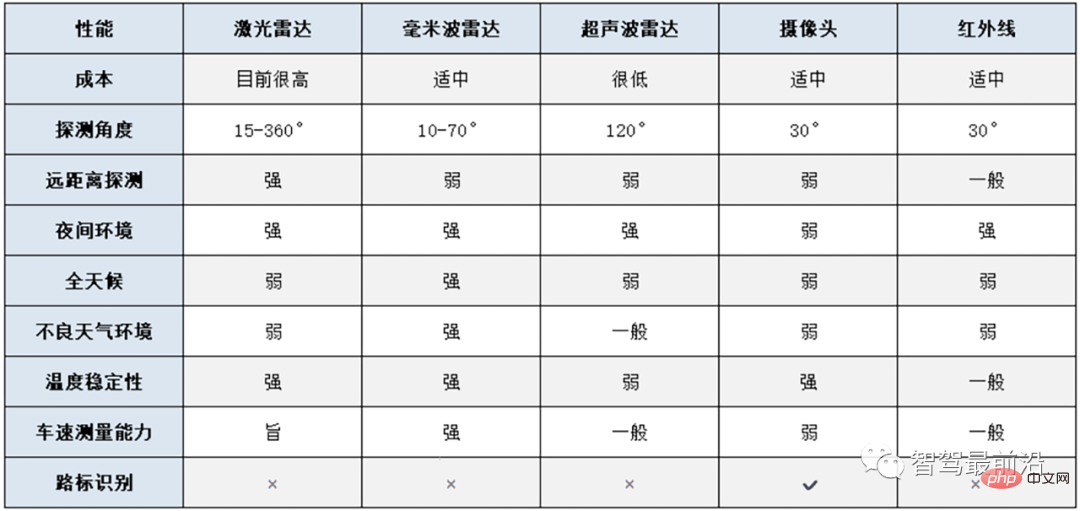
激光雷达也是通过ToF技术来确定目标位置与距离的。激光雷达是通过发射激光束来实现对目标的探测,其探测精度和灵敏度更高,探测范围更广,但激光雷达更容易受到空气中雨雪雾霾等的干扰,其高成本也是制约其应用的主要原因。车载激光雷达按发射激光束的数量可分为单线、4线、8线、16线和64线激光雷达。可以通过下面这个表格(表1),对比主流传感器的优势与不足。
自动驾驶环境感知通常采用“弱感知 超强智能”和“强感知 强智能”两大技术路线。其中“弱感知 超强智能”技术是指主要依赖摄像头与深度学习技术实现环境感知,而不依赖于激光雷达。这种技术认为人类靠一双眼睛就可以开车,那么车也可以靠摄像头来看清周围环境。如果超强智能暂时难以达到,为实现无人驾驶,那就需要增强感知能力,这就是所谓的“强感知 强智能”技术路线。
相比“弱感知 超强智能”技术路线,“强感知 强智能”技术路线的最大特征就是增加了激光雷达这个传感器,从而大幅提高感知能力。特斯拉采用“弱智能 超强智能”技术路线,而谷歌Waymo、百度Apollo、Uber、福特汽车等人工智能企业、出行公司、传统车企都采用“强感知 强智能”技术路线。
02 高精度定位技术
定位的目的是获取自动驾驶车辆相对于外界环境的精确位置,是自动驾驶车辆必备的基础。在复杂的地市道路行驶,定位精度要求误差不超过10 cm。例如:只有准确知道车辆与路口的距离,才能进行更精确的预判和准备;只有准确对车辆进行定位,才能判断车辆所处的车道。如果定位误差较高,严重时会造成交通完全事故。
GPS是目前最广泛采用的定位方法,GPS精度越高,GPS传感器的价格也越昂贵。但目前商用GPS技术定位精度远远不够,其精度只有米级且容易受到隧道遮挡、信号延迟等因素的干扰。为了解决这个问题,Qualcomm开发了基于视觉增强的高精度定位(VEPP)技术,该技术通过融合GNSS全球导航、摄像头、IMU惯性导航和轮速传感器等多个汽车部件的信息,通过各传感器之间的相互校准和数据融合,实现精确到车道线的全球实时定位。
03 决策与规划技术
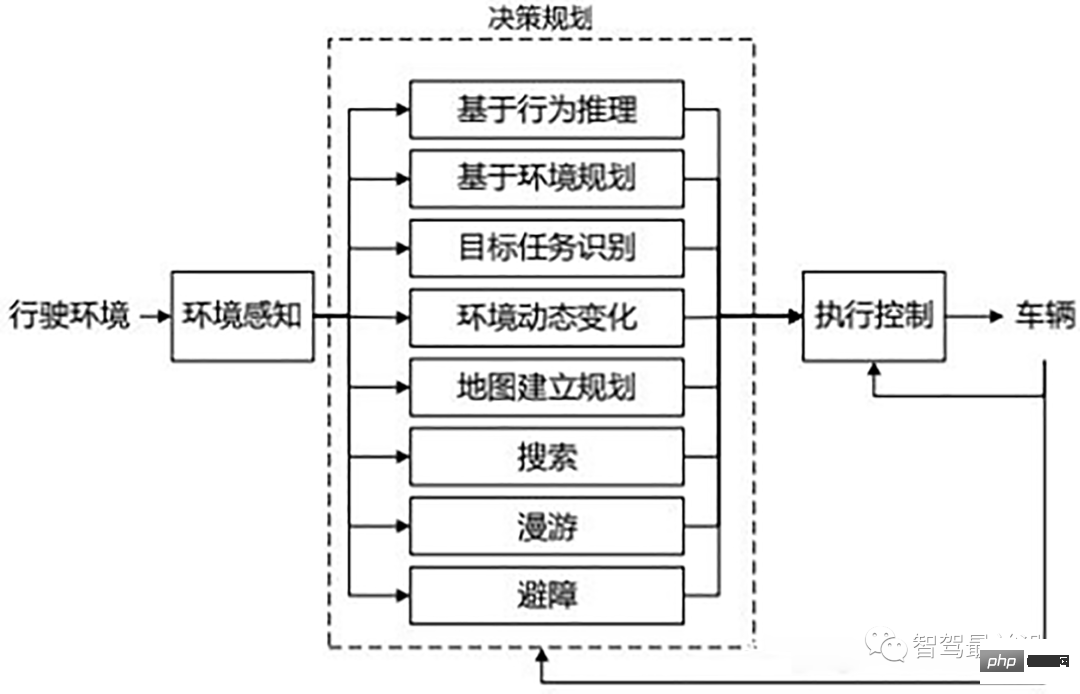
决策规划是自动驾驶的关键部分之一,它首先是融合多传感器信息,然后根据驾驶需求进行任务决策,接着能够在避开存在的障碍物前提之下,通过一些特定的约束条件,规划出两点之间多条可以选择的安全路径,并在这些路径当中选择一条最优的路径,作为车辆行驶轨迹,那就是规划。按照划分的层面不同,可以分为全局规划和局部规划两种,全局规划是由获取到的地图信息,规划出一条在特定条件之下的无碰撞最优路径。例如,从上海到北京有很多条路,规划出一条作为行驶路线即为全局规划。
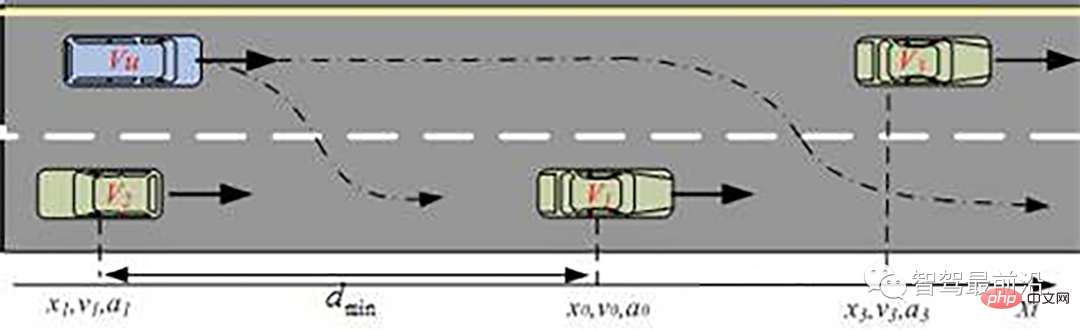
如栅格法、可视图法、拓扑法、自由空间法、神经网络法等静态路径规划算法。局部规划的则是根据全局的规划,在一些局部环境信息的基础之上,能够避免碰撞一些未知的障碍物,最终达到目的目标点的过程。例如,在全局规划好的上海到北京的那条路线上会有其他车辆或者障碍物,想要避过这些障碍物或者车辆,需要转向调整车道,这就是局部路径规划。局部路径规划的方法包括:人工势场法、矢量域直方图法、虚拟力场法、遗传算法等动态路径规划算法等。
决策规划层是自主驾驶系统,智能性的直接体现,对车辆的行驶安全性和整车起到了决定性的作用,常见的决策规划体系结构,有分层递进式,反应式,以及二者混合式。
分层递进式体系结构,就是一个串联系统的结构,在该系统当中,智能驾驶系统的各模块之间次序分明,上一个模块的输出即为下一模块的输入,因此又称为感知规划行动结构。但这种结构可靠性并不高,一旦某个模块出现软件或者硬件故障,整个信息流就会受到影响,整个系统很有可能发生崩溃,甚至处于瘫痪状态。

反应式体系结构采用并联的结构,控制层都可以直接基于传感器的输入进行决策,因此它所产生的动作就是传感数据直接作用的一个结果,可以突出感知动作的特点,适用于完全陌生的环境。反应式体系结构中的许多行为主要涉及成为一个简单的特殊任务,所以感觉规划控制可以紧密的结合在一块,占用的储存空间并不大,因而可以产生快速的响应,实时性比较强,同时每一层只需要负责系统的某一个行为,整个系统可以方便灵活的实现低层次到高层次的一个过渡,而且如若其中一个模块出现了预料之外的故障,剩下的层次,仍然可以产生有意义的动作,系统的鲁棒性得到了很大的提高,难点在于,由于系统执行动作的灵活性,需要特定的协调机制来解决各个控制回路,同意执行机构争夺之间的冲突,以便得到有意义的结果。
分层递阶式系统的一个结构和反应式体系的结构,都各自有优劣,都难以单独的满足行驶环境复杂多变的使用要求,所以越来越多的行业人士开始研究混合式的体系结构,将两者的优点进行有效的结合,在全局规划的层次上生成面向目标定义的分层式递阶行为,在局部规划的层面上就生成面向目标搜索的反应式体系的行为。
04 控制与执行技术
自动驾驶的控制核心技术就是车辆的纵向控制,横向控制,纵向控制及车辆的驱动和制动控制,而横向控制的就是方向盘角度的调整以及轮胎力的控制,实现了纵向和横向自动控制,就可以按给定目标和约束自动控制车运行。
车辆按照纵向控制是在行车速度方向上的控制,即车速以及本车与前后车或障碍物距离的自动控制。巡航控制和紧急制动控制都是典型的自动驾驶纵向控制案例。这类控制问题可归结为对电机驱动、发动机、传动和制动系统的控制。各种电机-发动机-传动模型、汽车运行模型和刹车过程模型与不同的控制器算法结合,构成了各种各样的纵向控制模式。
车辆的横向控制就是指垂直于运动方向的控制,目标是控制汽车自动保持期望的行车路线,并在不同的车速、载荷、风阻、路况下有很好的乘坐舒适和稳定。车辆横向控制主要有两种基本设计方法,一种是基于驾驶员模拟的方法(一种是使用用较简单的动力学模型和驾驶员操纵规则设计控制器;另一种是用驾驶员操纵过程的数据训练控制器获取控制算法);另一种是给予汽车横向运动力学模型的控制方法(需要建立精确的汽车横向运动模型。典型模型如单轨模型,该模型认为汽车左右两侧特性相同)
05 总结
除上述介绍的环境感知、精准定位、决策规划和控制执行之外,自动驾驶汽车还涉及到高精度地图、V2X、自动驾驶汽车测试等关键技术。自动驾驶技术是人工智能、高性能芯片、通信技术、传感器技术、车辆控制技术、大数据技术等多领域技术的结合体,落地技术难度大。除此之外,自动驾驶技术落地,还要建立满足自动驾驶要求的基础交通设施,并考虑自动驾驶方面的法律法规等。
以上是一文解读自动驾驶关键技术难点的详细内容。更多信息请关注PHP中文网其他相关文章!