



ros是linux发行版本。ROS全称Robot Operating System,译为机器人操作系统;它基于Linux内核,只能在Linux下运行。ROS提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。ROS可以分成两层,低层是上面描述的操作系统层,高层则是广大用户群贡献的实现不同功能的各种软件包,例如定位绘图、行动规划、感知等。

本教程操作环境:linux7.3系统、Dell G3电脑。
ROS定义介绍
ROS全称Robot Operating System,译为机器人操作系统。基于Linux内核,目前只能在Linux下运行。
ROS设计者将ROS表述为“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通讯机制、工具软件包、机器人高层技能以及机器人生态系统的集合体。
顾名思义,ROS是一个系统。它和我们用的普通操作系统类似,ROS将底层的机器人硬件封装起来,也就是说,不同的机器人中包含的各种底层参数,在使用ROS进行开发的人员眼里,都是一样的。这里还要提一下,目前ROS没有一个可视化界面。我们所用的Windows、Linux能直接看到图像界面并操作,是因为它们有一个可视化界面,而ROS没有。我们所谓的操作系统,并不一定是都要有可视化界面才算的,如果有兴趣的可以去看一下最早期的操作系统,只有命令行,并没有绚丽多彩的界面。
ROS提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。ROS是基于一种图状架构,从而不同节点的进程能接受,发布,聚合各种信息(例如传感,控制,状态,规划等等)。
ROS可以分成两层,低层是上面描述的操作系统层,高层则是广大用户群贡献的实现不同功能的各种软件包,例如定位绘图,行动规划,感知,模拟等等。
ROS是一个多义词,它还可以是一种通讯机制。在ROS开发中,用节点(Node)表示应用程序,一个节点就是一个可执行程序。节点之间就是通过ROS进行通信。ROS通过节点管理器(Master)对各个节点进行管理。至于具体的原理实现等后续再说。
此外,ROS还代表一系列用于机器人开发的工具包、算法、技能、平台、生态等。
ROS的历史。说白了,ROS就是一帮大佬在开发机器人的时候觉得比较好的东西(可以是一些好用的库、软件,也可以是一些思想、协议、标准)汇集在一起后形成的东西。在机器人的开发中,各种各样的机器人没有统一的标准,每次开发一个自己没见过的机器人都需要重新去学习大量的东西,十分的不方便,于是,大佬们借鉴操作系统产生的思想,觉得为什么不可以给机器人也做一套系统来对底层进行封装呢?于是,ROS产生了。经过岁月的打磨,ROS越来越完善,用的人也越来越多了。
如果你要问我ROS是干什么的,那你只需要知道一句话就够了。ROS是用来做机器人或者机器臂开发的。
机器人开发的历史中,标准化的工作还是没有做到位。不同的机器人,所用的系统、程序等等都不一样,这样导致只要跨平台,开发起来就十分的困难。为了解决这样的问题,ROS诞生了。ROS可以通过封装,使得底层硬件对于开发者来说变得透明,大大降低了跨平台开发的难度。
之所以选择ROS,上面说了那么多其实大家也应该明白了,无非就是,用的人多,普及范围广。ROS所包含的领域、资料、功能、内容、知识等十分丰富,不用它你想去自己编库么?
1. ROS的性能特色
在正式学习ROS之前,先介绍ROS的几个特性,即元操作系统、分布式通信机制、松耦合软件框架、丰富的开源功能库等,来帮大家建立一些感性的认识。
ROS是一个机器人领域的元操作系统。也就是说,它并不是真正意义上的操作系统,其底层的任务调度、编译、设备驱动等还是由它的原生操作系统Ubuntu Linux完成。
ROS实际上是运行在Ubuntu Linux上的亚操作系统,或者说软件框架,但提供硬件抽象、函数调用、进程管理这些类似操作系统的功能,也提供用于获取、编译、跨平台的函数和工具。
ROS的核心思想就是将机器人的软件功能做成一个个节点,节点之间通过互相发送消息进行沟通。这些节点可以部署在同一台主机上,也可以部署在不同主机上,甚至还可以部署在互联网上。ROS网络通信机制中的主节点(master)负责对网络中各个节点之间的通信过程进行管理调度,同时提供一个用于配置网络中全局参数的服务。
ROS是松耦合软件框架,利用分布式通信机制实现节点间的进程通信。ROS的软件代码以松耦合方式组织,开发过程灵活,管理维护方便。
ROS具有丰富的开源功能库。ROS是基于BSD(Berkeley Software Distribution,伯克利软件发行)协议的开源软件,允许任何人修改、重用、重发布以及在商业和闭源产品中使用,使用ROS能够快捷地搭建自己的机器人原型。
2. ROS的发行版本
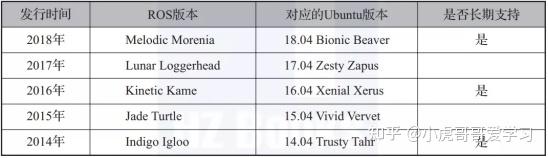
与Linux发行版类似,ROS发行版内置了一系列常用功能包,即将ROS系统打包安装到原生系统中。ROS最初是基于Ubuntu系统开发的,ROS的发行版本名称也和Ubuntu采用了同样的规则,即版本名称由两个相同首字母的英文单词组成,版本首字母按字母表递增顺序选取,图1-1展示了ROS的一些主要版本。

ROS系统架构
安装完ROS后,很多朋友应该迫不及待想立马开始写程序。由于ROS的架构比较复杂,为了后面容易理解遇到的各种概念,这里先讨论一下ROS的系统架构,好让大家对ROS中的各种概念有全面性把控。按照官方的说法,可以分别从计算图、文件系统和开源社区视角来理解ROS架构。
1. 从计算图视角理解ROS架构
ROS中可执行程序的基本单位叫节点(node),节点之间通过消息机制进行通信,这样就组成了一张网状图,也叫计算图,如图1-3所示。
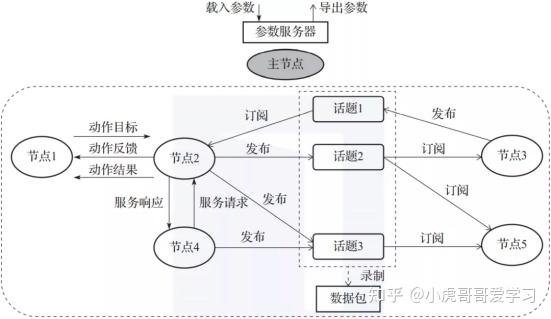

节点是可执行程序,通常也叫进程。ROS功能包中创建的每个可执行程序在被启动加载到系统进程中后,就是一个ROS节点,如图1-3中的节点1、节点2、节点3等。
节点之间通过收发消息进行通信,消息收发机制分为话题(topic)、服务(service)和动作(action)三种,如图1-3中的节点2与节点3、节点2与节点5采用话题通信,节点2与节点4采用服务通信,节点1与节点2采用动作通信。计算图中的节点、话题、服务、动作都要有唯一名称作为标识。
ROS利用节点将代码和功能解耦,提高了系统的容错性和可维护性。所以最好让每个节点都具有特定的单一功能,而不是创建一个包罗万象的庞大节点。如果用C++编写节点,需要用到ROS提供的roscpp库;如果用Python编写节点,需要用到ROS提供的rospy库。
消息是构成计算图的关键,包括消息机制和消息类型两部分。消息机制有话题、服务和动作三种,每种消息机制中传递的数据都具有特定的数据类型(即消息类型),消息类型可分为话题消息类型、服务消息类型和动作消息类型。消息机制和消息类型将在1.5节中展开讲解。
数据包(rosbag)是ROS中专门用来保存和回放话题中数据的文件,可以将一些难以收集的传感器数据用数据包录制下来,然后反复回放来进行算法性能调试。
参数服务器能够为整个ROS网络中的节点提供便于修改的参数。参数可以认为是节点中可供外部修改的全局变量,有静态参数和动态参数。静态参数一般用于在节点启动时设置节点工作模式;动态参数可以用于在节点运行时动态配置节点或改变节点工作状态,比如电机控制节点里的PID控制参数。
主节点负责各个节点之间通信过程的调度管理。因此主节点必须要最先启动,可以通过roscore命令启动。
2. 从文件系统视角理解ROS架构
ROS程序的不同组件要放在不同的文件夹中,这些文件夹根据不同的功能对文件进行组织,这就是ROS的文件系统结构,如图1-4所示。
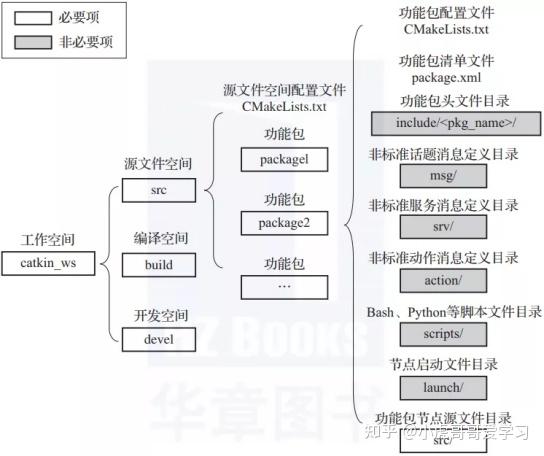

工作空间是一个包含功能包、编译包和编译后可执行文件的文件夹,用户可以根据自己的需要创建多个工作空间,在每个工作空间中开发不同用途的功能包。在图1-4中,我们创建了一个名为catkin_ws的工作空间,其中包含src、build和devel三个文件夹。
- src文件夹放置各个功能包和配置功能包的CMake配置文件CMakeLists.txt。这里说明一下,由于ROS中的源码采用catkin工具进行编译,而catkin工具又基于CMake技术,所以我们在src源文件空间和各个功能包中都会见到一个CMake配置文件CMakeLists.txt,这个文件起到配置编译的作用。
- build文件夹放置编译CMake和catkin功能包时产生的缓存、配置、中间文件等。
- devel文件夹放置编译好的可执行程序,这些可执行程序是不需要安装就能直接运行的。一旦功能包源码编译和测试通过后,可以将这些编译好的可执行文件直接导出与其他开发人员分享。
功能包是ROS中软件组织的基本形式,具有创建ROS程序的最小结构和最少内容,它包含ROS节点源码、脚本、配置文件等。
i. CMakeLists.txt是功能包配置文件,用于编译Cmake功能包编译时的编译配置。
ii. package.xml是功能包清单文件,用xml的标签格式标记该功能包的各类相关信息,比如包的名称、开发者信息、依赖关系等,主要是为了使功能包的安装和分发更容易。
iii. include/
iv. msg、srv和action这三个文件夹分别用于存放非标准话题消息、服务消息和动作消息的定义文件。ROS支持用户自定义消息通信过程中使用的消息类型。这些自定义消息不是必要的,比如程序只使用标准消息类型。
v. scripts目录存放Bash、Python等脚本文件,为非必要项。
vi. launch目录存放节点的启动文件,*.launch文件用于启动一个或多个节点,在含有多个节点的大型项目中很有用,为非必要项。
vii. src目录存放功能包节点所对应的源代码,一个功能包中可以有多个节点程序来完成不同的功能,每个节点程序都可以单独运行。这里src目录存放的是这些节点程序的源代码,你可以按需创建文件夹和文件来组织源代码,源代码可以用C++、Python等编写。
3. 从开源社区视角理解ROS架构
ROS是开源软件,各个独立的网络社区分享和贡献软件及教程,形成了强大的ROS开源社区,如图1-5所示。
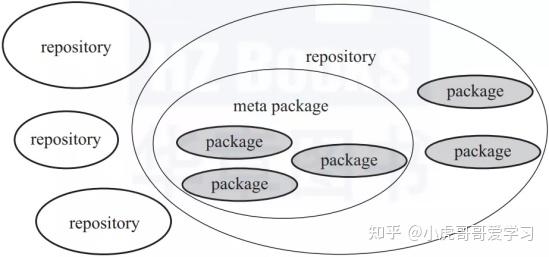

ROS的发展依赖于开源和共享的软件,这些代码由不同的机构共享和发布,比如GitHub源码共享、Ubuntu软件仓库发布、第三方库等。ROS的官方wiki是重要的文档讨论社区,在里面可以很方便地发布与修改相应的文档页面。ROS的answer主页里有大量ROS开发者的提问和回答,对ROS开发中遇到的各种问题的讨论很活跃。
相关推荐:《Linux视频教程》
以上是ros是linux什么版本的详细内容。更多信息请关注PHP中文网其他相关文章!

 Linux操作:系统管理和维护Apr 15, 2025 am 12:10 AM
Linux操作:系统管理和维护Apr 15, 2025 am 12:10 AMLinux系统管理和维护的关键步骤包括:1)掌握基础知识,如文件系统结构和用户管理;2)进行系统监控与资源管理,使用top、htop等工具;3)利用系统日志进行故障排查,借助journalctl等工具;4)编写自动化脚本和任务调度,使用cron工具;5)实施安全管理与防护,通过iptables配置防火墙;6)进行性能优化与最佳实践,调整内核参数和养成良好习惯。
 了解Linux的维护模式:必需品Apr 14, 2025 am 12:04 AM
了解Linux的维护模式:必需品Apr 14, 2025 am 12:04 AMLinux维护模式通过在启动时添加init=/bin/bash或single参数进入。1.进入维护模式:编辑GRUB菜单,添加启动参数。2.重新挂载文件系统为读写模式:mount-oremount,rw/。3.修复文件系统:使用fsck命令,如fsck/dev/sda1。4.备份数据并谨慎操作,避免数据丢失。
 Debian如何提升Hadoop数据处理速度Apr 13, 2025 am 11:54 AM
Debian如何提升Hadoop数据处理速度Apr 13, 2025 am 11:54 AM本文探讨如何在Debian系统上提升Hadoop数据处理效率。优化策略涵盖硬件升级、操作系统参数调整、Hadoop配置修改以及高效算法和工具的运用。一、硬件资源强化确保所有节点硬件配置一致,尤其关注CPU、内存和网络设备性能。选择高性能硬件组件对于提升整体处理速度至关重要。二、操作系统调优文件描述符和网络连接数:修改/etc/security/limits.conf文件,增加系统允许同时打开的文件描述符和网络连接数上限。JVM参数调整:在hadoop-env.sh文件中调整
 Debian syslog如何学习Apr 13, 2025 am 11:51 AM
Debian syslog如何学习Apr 13, 2025 am 11:51 AM本指南将指导您学习如何在Debian系统中使用Syslog。Syslog是Linux系统中用于记录系统和应用程序日志消息的关键服务,它帮助管理员监控和分析系统活动,从而快速识别并解决问题。一、Syslog基础知识Syslog的核心功能包括:集中收集和管理日志消息;支持多种日志输出格式和目标位置(例如文件或网络);提供实时日志查看和过滤功能。二、安装和配置Syslog(使用Rsyslog)Debian系统默认使用Rsyslog。您可以通过以下命令安装:sudoaptupdatesud
 Debian中Hadoop版本怎么选Apr 13, 2025 am 11:48 AM
Debian中Hadoop版本怎么选Apr 13, 2025 am 11:48 AM选择适合Debian系统的Hadoop版本,需要综合考虑以下几个关键因素:一、稳定性与长期支持:对于追求稳定性和安全性的用户,建议选择Debian稳定版,例如Debian11(Bullseye)。该版本经过充分测试,拥有长达五年的支持周期,能够确保系统稳定运行。二、软件包更新速度:如果您需要使用最新的Hadoop功能和特性,则可以考虑Debian的不稳定版(Sid)。但需注意,不稳定版可能存在兼容性问题和稳定性风险。三、社区支持与资源:Debian拥有庞大的社区支持,可以提供丰富的文档和
 Debian上TigerVNC共享文件方法Apr 13, 2025 am 11:45 AM
Debian上TigerVNC共享文件方法Apr 13, 2025 am 11:45 AM本文介绍如何在Debian系统上使用TigerVNC共享文件。你需要先安装TigerVNC服务器,然后进行配置。一、安装TigerVNC服务器打开终端。更新软件包列表:sudoaptupdate安装TigerVNC服务器:sudoaptinstalltigervnc-standalone-servertigervnc-common二、配置TigerVNC服务器设置VNC服务器密码:vncpasswd启动VNC服务器:vncserver:1-localhostno
 Debian邮件服务器防火墙配置技巧Apr 13, 2025 am 11:42 AM
Debian邮件服务器防火墙配置技巧Apr 13, 2025 am 11:42 AM配置Debian邮件服务器的防火墙是确保服务器安全性的重要步骤。以下是几种常用的防火墙配置方法,包括iptables和firewalld的使用。使用iptables配置防火墙安装iptables(如果尚未安装):sudoapt-getupdatesudoapt-getinstalliptables查看当前iptables规则:sudoiptables-L配置
 Debian邮件服务器SSL证书安装方法Apr 13, 2025 am 11:39 AM
Debian邮件服务器SSL证书安装方法Apr 13, 2025 am 11:39 AM在Debian邮件服务器上安装SSL证书的步骤如下:1.安装OpenSSL工具包首先,确保你的系统上已经安装了OpenSSL工具包。如果没有安装,可以使用以下命令进行安装:sudoapt-getupdatesudoapt-getinstallopenssl2.生成私钥和证书请求接下来,使用OpenSSL生成一个2048位的RSA私钥和一个证书请求(CSR):openss


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

SecLists
SecLists是最终安全测试人员的伙伴。它是一个包含各种类型列表的集合,这些列表在安全评估过程中经常使用,都在一个地方。SecLists通过方便地提供安全测试人员可能需要的所有列表,帮助提高安全测试的效率和生产力。列表类型包括用户名、密码、URL、模糊测试有效载荷、敏感数据模式、Web shell等等。测试人员只需将此存储库拉到新的测试机上,他就可以访问到所需的每种类型的列表。

Atom编辑器mac版下载
最流行的的开源编辑器

DVWA
Damn Vulnerable Web App (DVWA) 是一个PHP/MySQL的Web应用程序,非常容易受到攻击。它的主要目标是成为安全专业人员在合法环境中测试自己的技能和工具的辅助工具,帮助Web开发人员更好地理解保护Web应用程序的过程,并帮助教师/学生在课堂环境中教授/学习Web应用程序安全。DVWA的目标是通过简单直接的界面练习一些最常见的Web漏洞,难度各不相同。请注意,该软件中

mPDF
mPDF是一个PHP库,可以从UTF-8编码的HTML生成PDF文件。原作者Ian Back编写mPDF以从他的网站上“即时”输出PDF文件,并处理不同的语言。与原始脚本如HTML2FPDF相比,它的速度较慢,并且在使用Unicode字体时生成的文件较大,但支持CSS样式等,并进行了大量增强。支持几乎所有语言,包括RTL(阿拉伯语和希伯来语)和CJK(中日韩)。支持嵌套的块级元素(如P、DIV),

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

