



为了更好地了解智能机器人项目的需求和改进方向,我们常常需要研发一些工具。在我参与的多个机器人项目中,大多数都能够成功地满足产品需求。通过这些实践,我们深刻认识到,如果要不断进步和提高,就必须对现有的机器人定义语言进行重大的改进。
- 简化需要复杂对话流程的机器人的创建过程。
- 最大限度地提高可重用性,通过重用过去已经定义过的模块和对话路径来创建机器人
在传统的做法中,完成这些并不容易,因为意图定义与部分排序约束混合在一起,限制了对话路径的自由度。这对于处理“开放式”机器人(常见于FAQ样式的机器人),其中大多数问题是独立的且始终可用的,这已经足够了。但对于更“封闭”的机器人来说,潜在的对话限制要多得多(比如用于从在线订票机器人)。
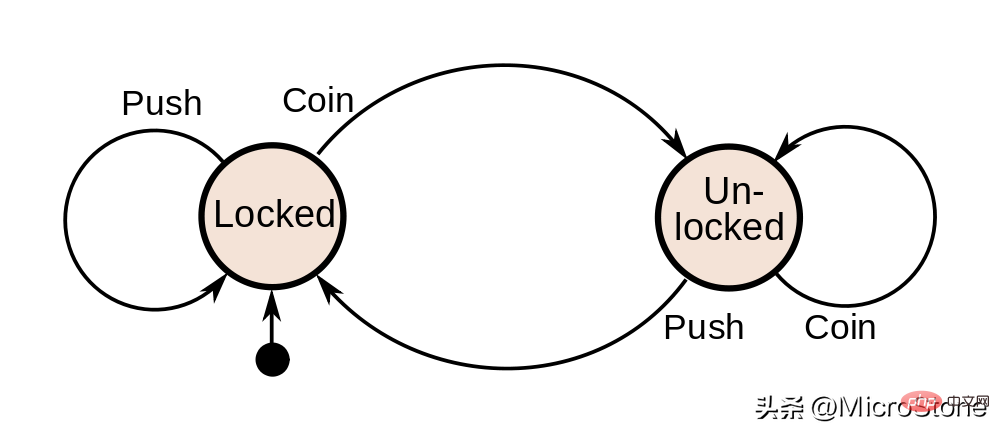
为了将聊天机器人定义语言的功能提升到一个新的水平,在一些项目中我们引进了更接近状态机语义的DSL,并完全将意图定义与控制机器人执行定点可用意图的转换规则分离,这么做有以下优势:
- 新机器人中可以复用以前的意图,即使设置的对话路径不同。
- 可以使用状态机定义复杂的对话流,让机器人保持清晰和精确的语义。
- 可以创建复杂的状态守护来控制转换。根据用户输入、即将发生的事件以及之前的数据、对话参数等,将机器人移动到新状态。
- 可以使用状态主体来存储复杂的对话逻辑,以响应用户请求。
- 可以将机器人模块化,以便在其他机器人中重用部分状态机。
- 可以将本地回退定义为状态行为的一部分。除了默认的全局回退,还可以将本地回退与状态相关联,以便在状态上下文中处理错误,比如显示一条消息,帮助用户回答机器人在对话中的特定状态下提出的问题。
意图定义语言
意图定义现在与执行部分解耦,但仍然是一个单独的子语言。对于每个意图,我们只需提供一些训练句子,让机器人能够识别出用户话语的意图,并从中提取所需的参数。
举个例子,我们有一个简单的机器人,它只能理解两种类型的用户话语:问候和陈述姓名。我们可以为每种话语类型提供几个示例句子,让机器人学会如何识别它们。当用户输入一个话语时,机器人会根据它的意图执行相应的操作,并从中提取所需的参数。
intent Hello {
inputs {
"你好"
"早上好"
}
}
intent MyNameIs {
inputs {
"我的名字叫小明"
"我是小明"
"你可以叫我小明"
}
creates context Greetings {
set parameter name from fragment "小明" (entity any)
}
}我们为每种意图提供一些样本句子,来训练机器人如何识别它们。此外,在某些情况下,我们还会在上下文中收集一些参数(例如,用户的姓名),以便以后能够更个性化地回答用户。
我们还没有具体说明机器人应该先尝试匹配哪种意图,这是执行部分语言的内容。这种方法使我们能够重复利用这些意图(例如,在另一个机器人中,我们可能需要询问用户的姓名,而不仅仅是在问候意图之后)。
执行定义语言
使用执行文件来定义一个状态机,描述机器人如何响应意图/事件,并且可以进行转换。这使得机器人的设计者可以查看执行文件,了解整个对话流程。
执行语言中的每个状态包含 3 个部分
- Body (可选):机器人在进入状态时执行的反应。
- Next (必选):定义了出站转换,表示为 condition –> State。 当接收到事件/意图时,会评估条件,如果满足转换,则执行引擎会移动到指定的状态并执行其相应的反应。需要注意的是,转换条件可以非常复杂。 它们是真正的守卫,这意味着如果整个条件不为真,则转换不可导航,引擎将保持当前状态。
- Fallback (可选):此部分可以包含任意代码(就像 Body 部分一样),如果引擎无法找到可导航的转换,则会执行这些代码。
执行模型还包含 2 个特殊状态:
- Init:是创建用户会话时进入的常规状态。它可以包含 Body、_Next_和 Fallback 部分。
- Default_Fallback:它只能包含 Body 部分,并且不能作为转换的目标状态。该状态表示在当前状态中未定义本地回退时执行的默认回退代码。该状态可用于打印通用错误消息(例如,“抱歉,我没明白您的意思”),而本地回退则可以打印针对当前状态的定制消息(例如,“请回答是或否”)。
最后,一个状态可以定义一个单一的通配符转换(使用保留字符___作为转换条件),当计算状态主体时将自动导航。这使我们能够在多个地方重用相同的代码并模块化执行逻辑。下面是一个简单的机器人示例,它只回复问候意图,询问用户名并向用户问好。这个机器人的回复可以通过我们基于 React 的聊天小部件显示。
//We can always have an init state in case we need to initialize some bot parameters (e.g. welcoming message)
Init {
Next {
//Here we state that the bot will first listen for an utterance matching the Hello intent, it will ignore anything else
intent == Hello --> HandleHello
}
}
HandleHello {
Body {
ReactPlatform.Reply("你好, 你叫什么名字?")
}
Next {
//We wait for the user to input the name, no other transition is possible at this point
//Obviously, in more complex bots we may have several possible outgoing transitions in a given state
intent == MyNameIs --> HandleMyNameIs
}
}
HandleMyNameIs {
Body {
ReactPlatform.Reply("你好 " + context.get("Greetings").get("name"))
}
Next {
// An automatic transition to the Init state since at this point the conversation is finished and we can start again
_ --> Init
}
}
// Default Fallback state could go here以上是基于状态机的聊天机器人设计经验总结的详细内容。更多信息请关注PHP中文网其他相关文章!

![无法使用chatgpt!解释可以立即测试的原因和解决方案[最新2025]](https://img.php.cn/upload/article/001/242/473/174717025174979.jpg?x-oss-process=image/resize,p_40) 无法使用chatgpt!解释可以立即测试的原因和解决方案[最新2025]May 14, 2025 am 05:04 AM
无法使用chatgpt!解释可以立即测试的原因和解决方案[最新2025]May 14, 2025 am 05:04 AMChatGPT无法访问?本文提供多种实用解决方案!许多用户在日常使用ChatGPT时,可能会遇到无法访问或响应缓慢等问题。本文将根据不同情况,逐步指导您解决这些问题。 ChatGPT无法访问的原因及初步排查 首先,我们需要确定问题是出在OpenAI服务器端,还是用户自身网络或设备问题。 请按照以下步骤进行排查: 步骤1:检查OpenAI官方状态 访问OpenAI Status页面 (status.openai.com),查看ChatGPT服务是否正常运行。如果显示红色或黄色警报,则表示Open
 计算ASI的风险始于人类的思想May 14, 2025 am 05:02 AM
计算ASI的风险始于人类的思想May 14, 2025 am 05:02 AM2025年5月10日,麻省理工学院物理学家Max Tegmark告诉《卫报》,AI实验室应在释放人工超级智能之前模仿Oppenheimer的三位一体测试演算。 “我的评估是'康普顿常数',这是一场比赛的可能性
 易于理解的解释如何编写和撰写歌词和推荐工具May 14, 2025 am 05:01 AM
易于理解的解释如何编写和撰写歌词和推荐工具May 14, 2025 am 05:01 AMAI音乐创作技术日新月异,本文将以ChatGPT等AI模型为例,详细讲解如何利用AI辅助音乐创作,并辅以实际案例进行说明。我们将分别介绍如何通过SunoAI、Hugging Face上的AI jukebox以及Python的Music21库进行音乐创作。 通过这些技术,每个人都能轻松创作原创音乐。但需注意,AI生成内容的版权问题不容忽视,使用时务必谨慎。 让我们一起探索AI在音乐领域的无限可能! OpenAI最新AI代理“OpenAI Deep Research”介绍: [ChatGPT]Ope
 什么是chatgpt-4?对您可以做什么,定价以及与GPT-3.5的差异的详尽解释!May 14, 2025 am 05:00 AM
什么是chatgpt-4?对您可以做什么,定价以及与GPT-3.5的差异的详尽解释!May 14, 2025 am 05:00 AMChatGPT-4的出现,极大地拓展了AI应用的可能性。相较于GPT-3.5,ChatGPT-4有了显着提升,它具备强大的语境理解能力,还能识别和生成图像,堪称万能的AI助手。在提高商业效率、辅助创作等诸多领域,它都展现出巨大的潜力。然而,与此同时,我们也必须注意其使用上的注意事项。 本文将详细解读ChatGPT-4的特性,并介绍针对不同场景的有效使用方法。文中包含充分利用最新AI技术的技巧,敬请参考。 OpenAI发布的最新AI代理,“OpenAI Deep Research”详情请点击下方链
 解释如何使用chatgpt应用程序!日本支持和语音对话功能May 14, 2025 am 04:59 AM
解释如何使用chatgpt应用程序!日本支持和语音对话功能May 14, 2025 am 04:59 AMCHATGPT应用程序:与AI助手释放您的创造力!初学者指南 ChatGpt应用程序是一位创新的AI助手,可处理各种任务,包括写作,翻译和答案。它是一种具有无限可能性的工具,可用于创意活动和信息收集。 在本文中,我们将以一种易于理解的方式解释初学者,从如何安装chatgpt智能手机应用程序到语音输入功能和插件等应用程序所独有的功能,以及在使用该应用时要牢记的要点。我们还将仔细研究插件限制和设备对设备配置同步
 如何使用中文版Chatgpt?注册程序和费用的说明May 14, 2025 am 04:56 AM
如何使用中文版Chatgpt?注册程序和费用的说明May 14, 2025 am 04:56 AMChatGPT中文版:解锁中文AI对话新体验 ChatGPT风靡全球,您知道它也提供中文版本吗?这款强大的AI工具不仅支持日常对话,还能处理专业内容,并兼容简体中文和繁体中文。无论是中国地区的使用者,还是正在学习中文的朋友,都能从中受益。 本文将详细介绍ChatGPT中文版的使用方法,包括账户设置、中文提示词输入、过滤器的使用、以及不同套餐的选择,并分析潜在风险及应对策略。此外,我们还将对比ChatGPT中文版和其他中文AI工具,帮助您更好地了解其优势和应用场景。 OpenAI最新发布的AI智能
 5 AI代理神话,您需要停止相信May 14, 2025 am 04:54 AM
5 AI代理神话,您需要停止相信May 14, 2025 am 04:54 AM这些可以将其视为生成AI领域的下一个飞跃,这为我们提供了Chatgpt和其他大型语言模型聊天机器人。他们可以代表我们采取行动,而不是简单地回答问题或产生信息
 易于理解使用Chatgpt创建和管理多个帐户的非法性的解释May 14, 2025 am 04:50 AM
易于理解使用Chatgpt创建和管理多个帐户的非法性的解释May 14, 2025 am 04:50 AM使用chatgpt有效的多个帐户管理技术|关于如何使用商业和私人生活的详尽解释! Chatgpt在各种情况下都使用,但是有些人可能担心管理多个帐户。本文将详细解释如何为ChatGpt创建多个帐户,使用时该怎么做以及如何安全有效地操作它。我们还介绍了重要的一点,例如业务和私人使用差异,并遵守OpenAI的使用条款,并提供指南,以帮助您安全地利用多个帐户。 Openai


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

禅工作室 13.0.1
功能强大的PHP集成开发环境

VSCode Windows 64位 下载
微软推出的免费、功能强大的一款IDE编辑器

PhpStorm Mac 版本
最新(2018.2.1 )专业的PHP集成开发工具

适用于 Eclipse 的 SAP NetWeaver 服务器适配器
将Eclipse与SAP NetWeaver应用服务器集成。

安全考试浏览器
Safe Exam Browser是一个安全的浏览器环境,用于安全地进行在线考试。该软件将任何计算机变成一个安全的工作站。它控制对任何实用工具的访问,并防止学生使用未经授权的资源。

