


arXiv论文“Sim-to-Real Domain Adaptation for Lane Detection and Classification in Autonomous Driving“,2022年5月,加拿大滑铁卢大学的工作。

虽然自主驾驶的监督检测和分类框架需要大型标注数据集,但光照真实模拟环境生成的合成数据推动的无监督域适应(UDA,Unsupervised Domain Adaptation)方法则是低成本、耗时更少的解决方案。本文提出对抗性鉴别和生成(adversarial discriminative and generative)方法的UDA方案,用于自动驾驶的车道线检测和分类应用。
还介绍Simulanes数据集生成器,利用CARLA的巨大交通场景和天气条件,创建一个自然的合成数据集。提出的UDA框架将带标签的合成数据集作为源域,而目标域是未标记的真实数据。用对抗生成和特征鉴别器,调试学习模型,预测目标域的车道位置和类别。用真实数据集和合成数据集进行评估。
开源UDA框架在githubcom/anita-hu/sim2real-lane-detection,还有数据集生成器在github.com/anita-hu/simulanes。
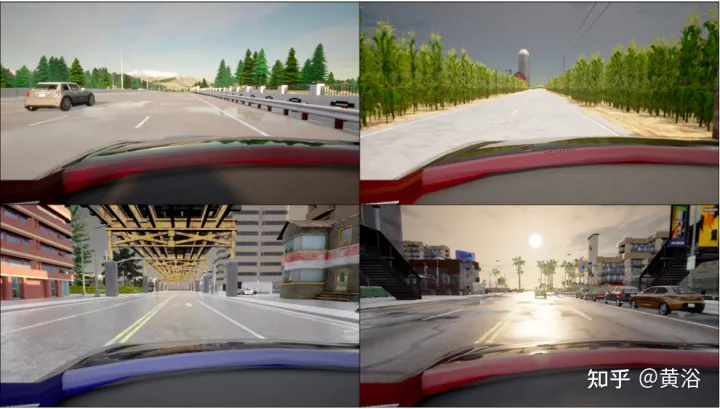
现实世界中的驾驶具有多样性,交通条件、天气和周围环境也各不相同。因此,模拟场景的多样性对模型在现实世界中的良好适应性至关重要。有许多用于自动驾驶的开源模拟器,即CARLA和LGSVL。本文选择CARLA来生成模拟数据集,除灵活的Python API外,CARLA还包含丰富的覆盖城市、农村和公路场景的预先绘制地图内容。
模拟数据生成器Simulanes在城市、农村和公路环境中生成了各种模拟场景,包括15个车道类别和动态天气。如图显示来自合成数据集的样本。行人和车辆参与者随机生成并放置在地图上,通过遮挡增加数据集的难度。根据TuSimple和CULane数据集,将车辆附近的最大车道数限制为4条,并用行锚点为标签。
由于CARLA模拟器不直接给出车道位置标签,用CARLA的路点系统(waypoint system)生成标签。CARLA路点是车辆autopilot要遵循的预定义位置,位于车道中心。为了获得车道位置标签,将当前车道的路点左右移动W/2,其中W是模拟器给定的车道宽度。然后将这些移动的路点投影到摄像头坐标系,并采用样条曲线拟合,以便沿预定的行锚点生成标签。类标签由模拟器给出,是15个类的一个。
为了生成具有N帧的数据集,将N均匀地划分到所有可用的地图上。从默认的CARLA地图中,用城镇1、3、4、5、7和10,而城镇2和6由于提取的车道位置标签与图像的车道位置之间存在差异而未使用。对每个地图,车辆参与者在随机位置生成,并随机移动。动态天气通过将时间作为正弦函数平滑地改变太阳的位置并偶尔产生风暴来实现,风暴通过云量、水量和积水等变量影响环境的外观。为了避免在同一位置保存多个帧,检查车辆是否已从前一帧位置移动,如果这个车辆停止太长时间,则重新生成新的车辆。
当sim-to-real算法应用于车道检测时,采用端到端的方法,并使用Ultra- Fast-Lane-Detection(UFLD)模型作为基础网络。之所以选择UFLD,是因为其轻量级架构可以在相同输入分辨率下实现300帧/秒速度,同时具有与最先进方法相当的性能。UFLD将车道检测任务表述为基于行的选择法,其中每个车道由预定义行的一系列水平位置表示,即行锚点。对于每个行锚点,位置被划分为w网格单元。对于第i条车道和第j行锚点,位置预测成为一个分类问题,其中模型输出选择(w+1)网格单元的概率Pi,j。输出中的附加维度是无车道。
UFLD提出一个辅助分割分支,在多尺度上聚集特征来建模局部特征,这个只在训练期间使用。随UFLD方法,交叉熵损失用于分割损失Lseg。对于车道分类,添加一个全连接(FC)层的小分支,接收与车道位置预测的FC层相同的特征。车道分类损失Lcls也使用交叉熵损失。
为了缓解UDA设置的域漂移问题,采用了UNIT(“Unsupervised Image-to-Image Translation Networks“,NIPS,2017)& MUNIT(“Multimodal unsupervised image-to-image translation,” ECCV 2018)的对抗性生成方法,以及使用特征鉴别器的对抗性判别方法。如图所示:提出了对抗性生成方法(A)和对抗性判别方法(B)。UNIT和MUNIT在(A)中表示,其中显示用于图像翻译(image translation)的生成器输入。MUNIT的附加风格输入以蓝色虚线显示。为了简单起见,省略了MUNIT风格的编码器输出,因为它不用于图像翻译。

实验结果如下:

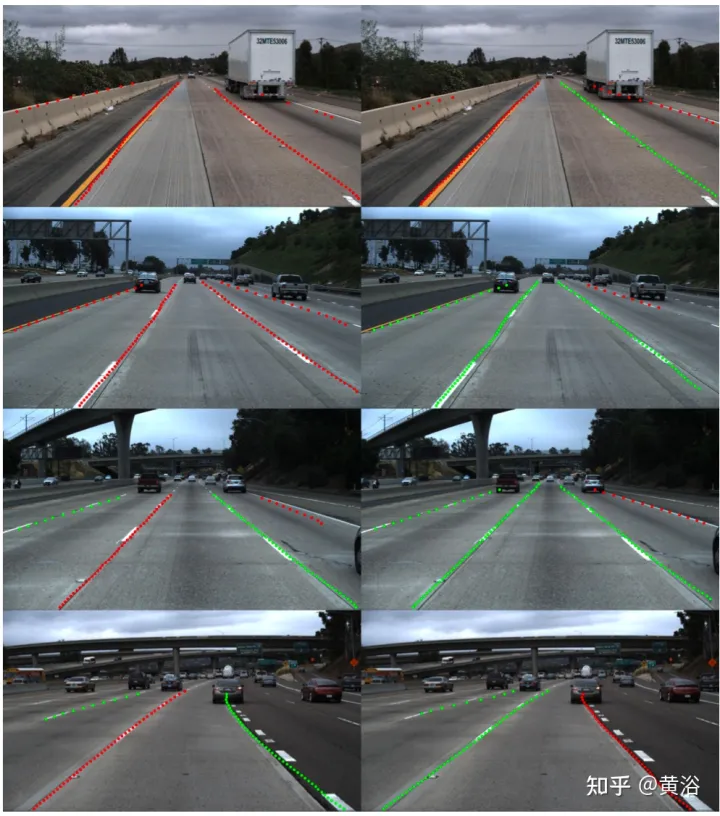
左:直接迁移法,右:对抗鉴别(ADA)方法
以上是自动驾驶车道线检测分类的虚拟-真实域适应方法的详细内容。更多信息请关注PHP中文网其他相关文章!

 微软工作趋势指数2025显示工作场所容量应变Apr 24, 2025 am 11:19 AM
微软工作趋势指数2025显示工作场所容量应变Apr 24, 2025 am 11:19 AM由于AI的快速整合而加剧了工作场所的迅速危机危机,要求战略转变以外的增量调整。 WTI的调查结果强调了这一点:68%的员工在工作量上挣扎,导致BUR
 AI可以理解吗?中国房间的论点说不,但是对吗?Apr 24, 2025 am 11:18 AM
AI可以理解吗?中国房间的论点说不,但是对吗?Apr 24, 2025 am 11:18 AM约翰·塞尔(John Searle)的中国房间论点:对AI理解的挑战 Searle的思想实验直接质疑人工智能是否可以真正理解语言或具有真正意识。 想象一个人,对下巴一无所知
 中国的'智能” AI助手回应微软召回的隐私缺陷Apr 24, 2025 am 11:17 AM
中国的'智能” AI助手回应微软召回的隐私缺陷Apr 24, 2025 am 11:17 AM与西方同行相比,中国的科技巨头在AI开发方面的课程不同。 他们不专注于技术基准和API集成,而是优先考虑“屏幕感知” AI助手 - AI T
 Docker将熟悉的容器工作流程带到AI型号和MCP工具Apr 24, 2025 am 11:16 AM
Docker将熟悉的容器工作流程带到AI型号和MCP工具Apr 24, 2025 am 11:16 AMMCP:赋能AI系统访问外部工具 模型上下文协议(MCP)让AI应用能够通过标准化接口与外部工具和数据源交互。由Anthropic开发并得到主要AI提供商的支持,MCP允许语言模型和智能体发现可用工具并使用合适的参数调用它们。然而,实施MCP服务器存在一些挑战,包括环境冲突、安全漏洞以及跨平台行为不一致。 Forbes文章《Anthropic的模型上下文协议是AI智能体发展的一大步》作者:Janakiram MSVDocker通过容器化解决了这些问题。基于Docker Hub基础设施构建的Doc
 使用6种AI街头智能策略来建立一家十亿美元的创业Apr 24, 2025 am 11:15 AM
使用6种AI街头智能策略来建立一家十亿美元的创业Apr 24, 2025 am 11:15 AM有远见的企业家采用的六种策略,他们利用尖端技术和精明的商业敏锐度来创造高利润的可扩展公司,同时保持控制权。本指南是针对有抱负的企业家的,旨在建立一个
 Google照片更新解锁了您所有图片的惊人Ultra HDRApr 24, 2025 am 11:14 AM
Google照片更新解锁了您所有图片的惊人Ultra HDRApr 24, 2025 am 11:14 AMGoogle Photos的新型Ultra HDR工具:改变图像增强的游戏规则 Google Photos推出了一个功能强大的Ultra HDR转换工具,将标准照片转换为充满活力的高动态范围图像。这种增强功能受益于摄影师
 Descope建立AI代理集成的身份验证框架Apr 24, 2025 am 11:13 AM
Descope建立AI代理集成的身份验证框架Apr 24, 2025 am 11:13 AM技术架构解决了新兴的身份验证挑战 代理身份集线器解决了许多组织仅在开始AI代理实施后发现的问题,即传统身份验证方法不是为机器设计的
 Google Cloud Next 2025以及现代工作的未来Apr 24, 2025 am 11:12 AM
Google Cloud Next 2025以及现代工作的未来Apr 24, 2025 am 11:12 AM(注意:Google是我公司的咨询客户,Moor Insights&Strateging。) AI:从实验到企业基金会 Google Cloud Next 2025展示了AI从实验功能到企业技术的核心组成部分的演变,


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

VSCode Windows 64位 下载
微软推出的免费、功能强大的一款IDE编辑器

Atom编辑器mac版下载
最流行的的开源编辑器

EditPlus 中文破解版
体积小,语法高亮,不支持代码提示功能

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 英文版
推荐:为Win版本,支持代码提示!

