


下面由golang教程栏目给大家介绍关于golang封装一个bash函数,用于执行bash命令析,希望对需要的朋友有所帮助!

开篇
这周在看内部一个熔断限流包时,发现它是基于一个开源项目 hystrix-go 实现了,因此有了这篇文章。
Hystrix
Hystrix 是由 Netflex 开发的一款开源组件,提供了基础的熔断功能。 Hystrix 将降级的策略封装在 Command 中,提供了 run 和 fallback 两个方法,前者表示正常的逻辑,比如微服务之间的调用……,如果发生了故障,再执行 fallback方法返回结果,我们可以把它理解成保底操作。如果正常逻辑在短时间内频繁发生故障,那么可能会触发短路,也就是之后的请求不再执行 run,而是直接执行 fallback。更多关于 Hystrix 的信息可以查看 https://github.com/Netflix/Hystrix,而hystrix-go 则是用 go 实现的 hystrix 版,更确切的说,是简化版。只是上一次更新还是 2018年 的一次 pr,也就毕业了?
为什么需要这些工具?
比如一个微服务化的产品线上,每一个服务都专注于自己的业务,并对外提供相应的服务接口,或者依赖于外部服务的某个逻辑接口,就像下面这样。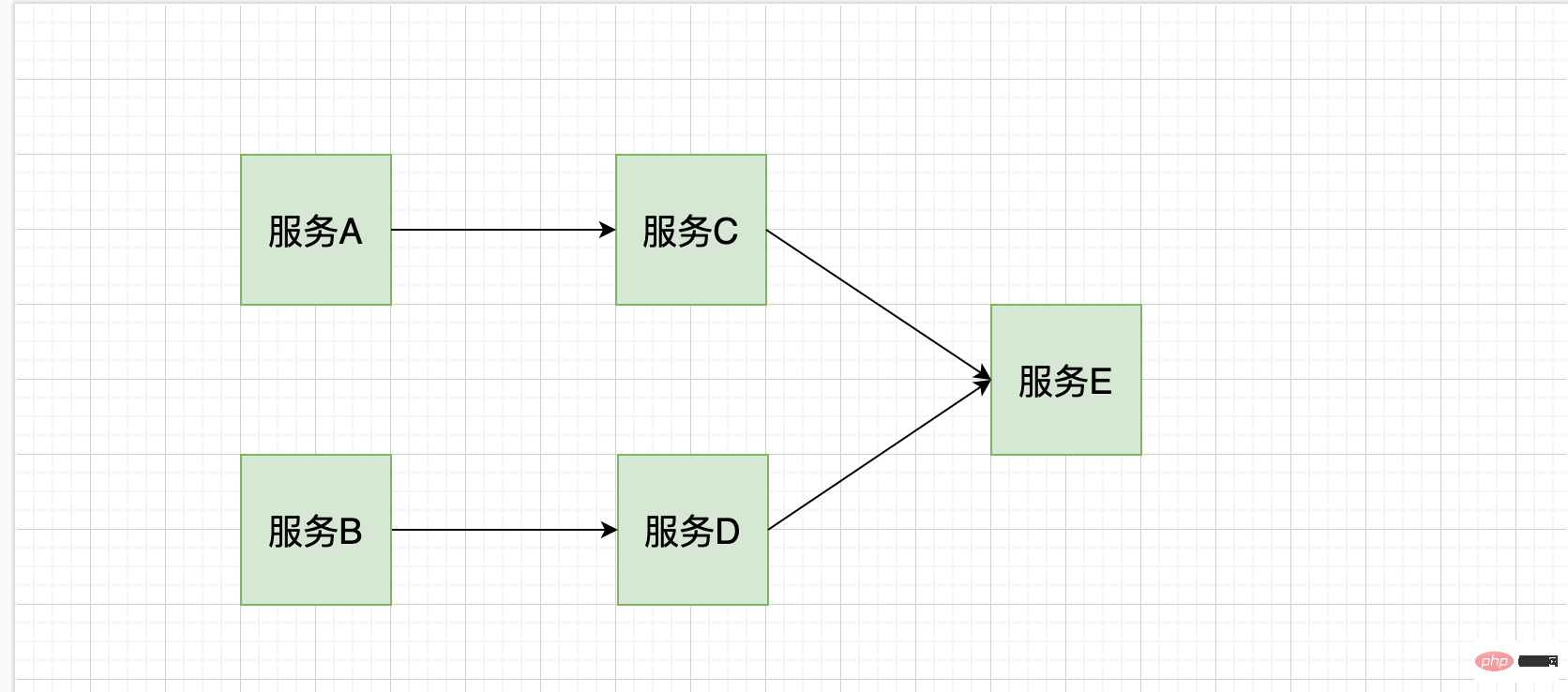
假设我们当前是 服务A,有部分逻辑依赖于 服务C,服务C 又依赖于 服务E,当前微服务之间进行 rpc或者 http通信,假设此时 服务C 调用 服务E 失败,比如由于网络波动导致超时或者服务E由于过载,系统E 已经down掉了。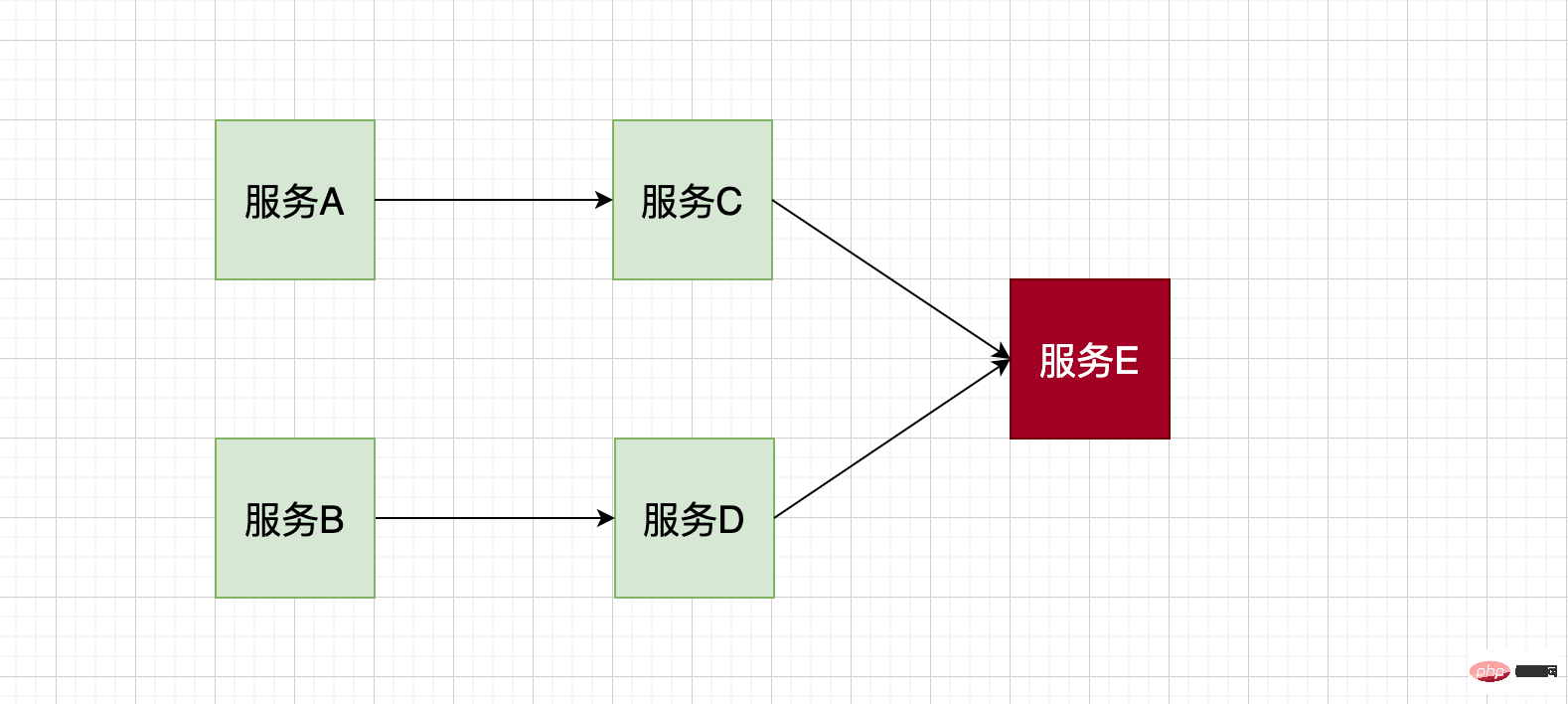
调用失败,一般会有失败重试等机制。但是再想想,假设服务E已然不可用的情况下,此时新的调用不断产生,同时伴随着调用等待和失败重试,会导致 服务C对服务E的调用而产生大量的积压,慢慢会耗尽服务C的资源,进而导致服务C也down掉,这样恶性循环下,会影响到整个微服务体系,产生雪崩效应。
虽然导致雪崩的发生不仅仅这一种,但是我们需要采取一定的措施,来保证不让这个噩梦发生。而 hystrix-go就很好的提供了 熔断和降级的措施。它的主要思想在于,设置一些阀值,比如最大并发数(当并发数大于设置的并发数,拦截),错误率百分比(请求数量大于等于设置 的阀值,并且错误率达到设置的百分比时,触发熔断)以及熔断尝试恢复时间等 。
使用
hystrix-go 的使用非常简单,你可以调用它的 Go 或者 Do方法,只是 Go 方法是异步的方式。而 Do 方法是同步方式。我们从一个简单的例子开启。
_ = hystrix.Do("wuqq", func() error {
// talk to other services
_, err := http.Get("https://www.baidu.com/")
if err != nil {
fmt.Println("get error:%v",err)
return err }
return nil
}, func(err error) error {
fmt.Printf("handle error:%v\n", err)
return nil
})
Do 函数需要三个参数,第一个参数 commmand 名称,你可以把每个名称当成一个独立当服务,第二个参数是处理正常的逻辑,比如 http 调用服务,返回参数是 err。如果处理|调用失败,那么就执行第三个参数逻辑, 我们称为保底操作。由于服务错误率过高导致熔断器开启,那么之后的请求也直接回调此函数。
既然熔断器是按照配置的规则而进行是否开启的操作,那么我们当然可以设置我们想要的值。
hystrix.ConfigureCommand("wuqq", hystrix.CommandConfig{
Timeout: int(3 * time.Second),
MaxConcurrentRequests: 10,
SleepWindow: 5000,
RequestVolumeThreshold: 10,
ErrorPercentThreshold: 30,
})
_ = hystrix.Do("wuqq", func() error {
// talk to other services
_, err := http.Get("https://www.baidu.com/")
if err != nil {
fmt.Println("get error:%v",err)
return err }
return nil
}, func(err error) error {
fmt.Printf("handle error:%v\n", err)
return nil
})
稍微解释一下上面配置的值含义:
- Timeout: 执行
command的超时时间。 - MaxConcurrentRequests:
command的最大并发量 。 - SleepWindow:当熔断器被打开后,
SleepWindow的时间就是控制过多久后去尝试服务是否可用了。 - RequestVolumeThreshold: 一个统计窗口10秒内请求数量。达到这个请求数量后才去判断是否要开启熔断
- ErrorPercentThreshold:错误百分比,请求数量大于等于
RequestVolumeThreshold并且错误率到达这个百分比后就会启动熔断
当然你不设置的话,那么自动走的默认值。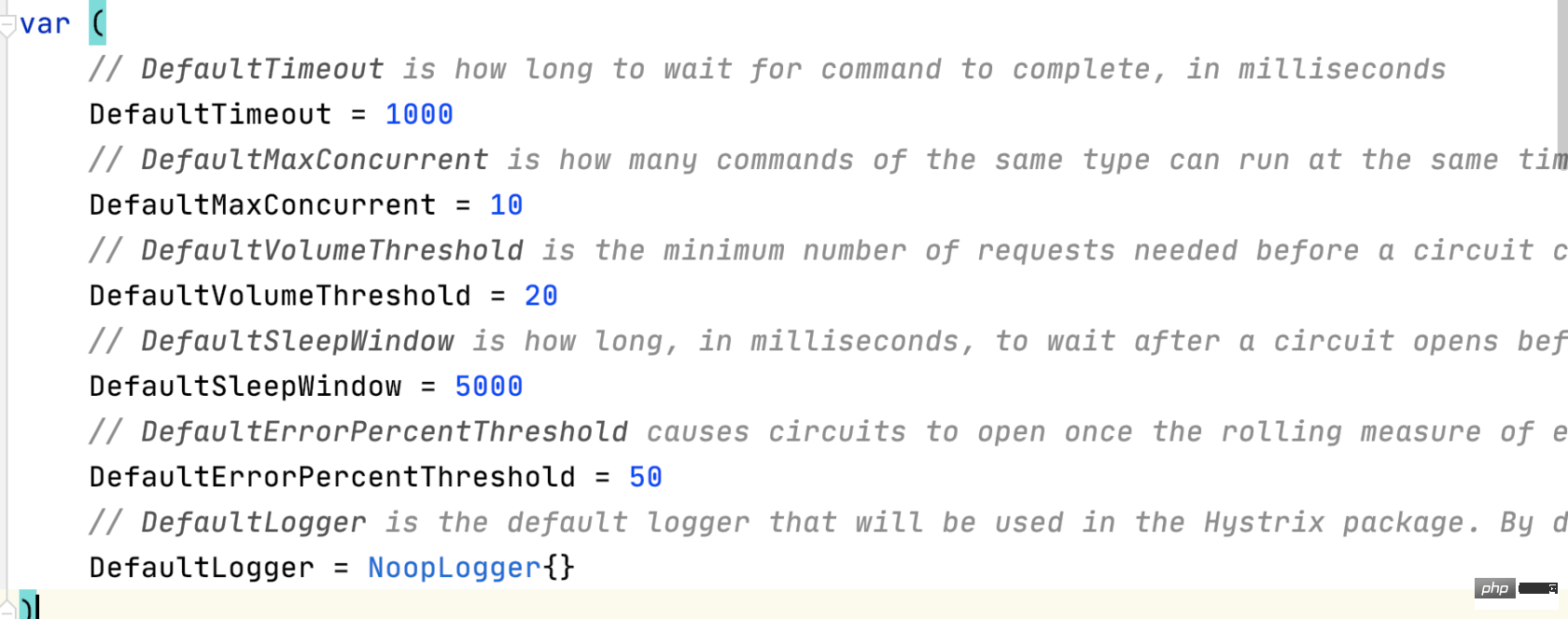
我们再来看一个简单的例子:
package mainimport (
"fmt"
"github.com/afex/hystrix-go/hystrix" "net/http" "time")type Handle struct{}func (h *Handle) ServeHTTP(r http.ResponseWriter, request *http.Request) {
h.Common(r, request)}func (h *Handle) Common(r http.ResponseWriter, request *http.Request) {
hystrix.ConfigureCommand("mycommand", hystrix.CommandConfig{
Timeout: int(3 * time.Second),
MaxConcurrentRequests: 10,
SleepWindow: 5000,
RequestVolumeThreshold: 20,
ErrorPercentThreshold: 30,
})
msg := "success"
_ = hystrix.Do("mycommand", func() error {
_, err := http.Get("https://www.baidu.com")
if err != nil {
fmt.Printf("请求失败:%v", err)
return err }
return nil
}, func(err error) error {
fmt.Printf("handle error:%v\n", err)
msg = "error"
return nil
})
r.Write([]byte(msg))}func main() {
http.ListenAndServe(":8090", &Handle{})}
我们开启了一个 http 服务,监听端口号 8090,所有请求的处理逻辑都在 Common 方法中,在这个方法中,我们主要是发起一次 http请求,请求成功响应success,如果失败,响应失败原因。
我们再写另一个简单程序,并发 11 次的请求 8090 端口。
package mainimport (
"fmt"
"io/ioutil"
"net/http"
"sync"
"time")var client *http.Clientfunc init() {
tr := &http.Transport{
MaxIdleConns: 100,
IdleConnTimeout: 1 * time.Second,
}
client = &http.Client{Transport: tr}}type info struct {
Data interface{} `json:"data"`}func main() {
var wg sync.WaitGroup for i := 0; i < 11; i++ {
wg.Add(1)
go func(int2 int) {
defer wg.Done()
req, err := http.NewRequest("GET", "http://localhost:8090", nil)
if err != nil {
fmt.Printf("初始化http客户端处错误:%v", err)
return
}
resp, err := client.Do(req)
if err != nil {
fmt.Printf("初始化http客户端处错误:%v", err)
return
}
defer resp.Body.Close()
nByte, err := ioutil.ReadAll(resp.Body)
if err != nil {
fmt.Printf("读取http数据失败:%v", err)
return
}
fmt.Printf("接收到到值:%v\n", string(nByte))
}(i)
}
wg.Wait()
fmt.Printf("请求完毕\n")}由于我们配置 MaxConcurrentRequests 为10,那么意味着还有个 g 请求会失败: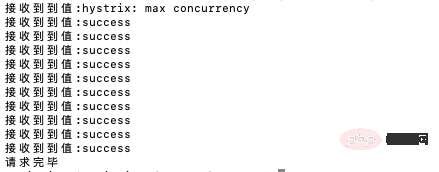
和我们想的一样。
接着我们把网络断开,并发请求改成10次。再次运行程序并发请求 8090 端口,此时由于网络已关闭,导致请求百度失败: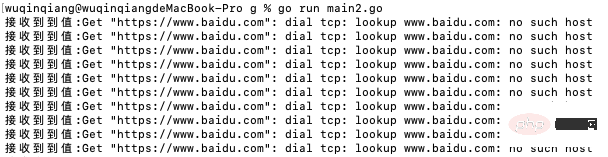
接着继续请求: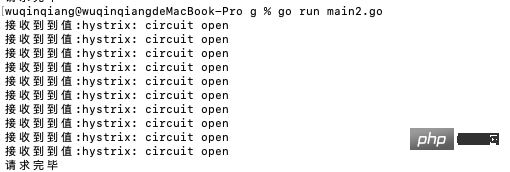
熔断器已开启,上面我们配置的RequestVolumeThreshold 和 ErrorPercentThreshold 生效。
然后我们把网连上,五秒后 (SleepWindow的值)继续并发调用,当前熔断器处于半开的状态,此时请求允许调用依赖,如果成功则关闭,失败则继续开启熔断器。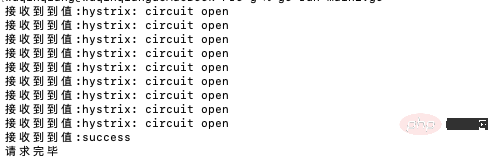
可以看到,有一个成功了,那么此时熔断器已关闭,接下来继续运行函数并发调用: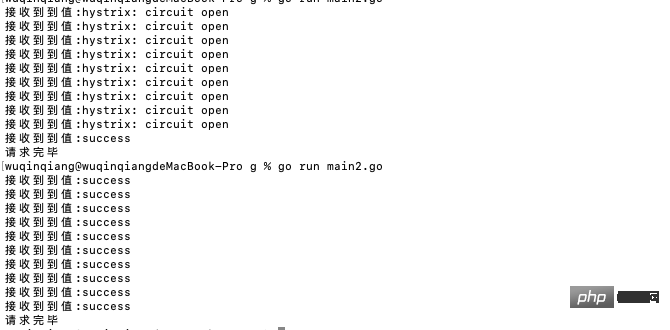
可以看到,10个都已经是正常成功的状态了。
那么问题来了,为什么最上面的图只有一个是成功的?5秒已经过了,并且当前网络正常,应该是10个请求都成功,但是我们看到的只有一个是成功状态。通过源码我们可以找到答案:
具体逻辑在判断当前请求是否可以调用依赖
if !cmd.circuit.AllowRequest() {
......
return
}func (circuit *CircuitBreaker) AllowRequest() bool {
return !circuit.IsOpen() || circuit.allowSingleTest()}func (circuit *CircuitBreaker) allowSingleTest() bool {
circuit.mutex.RLock()
defer circuit.mutex.RUnlock()
now := time.Now().UnixNano()
openedOrLastTestedTime := atomic.LoadInt64(&circuit.openedOrLastTestedTime)
if circuit.open && now > openedOrLastTestedTime+getSettings(circuit.Name).SleepWindow.Nanoseconds() {
/
swapped := atomic.CompareAndSwapInt64(&circuit.openedOrLastTestedTime, openedOrLastTestedTime, now) //这一句才是关键
if swapped {
log.Printf("hystrix-go: allowing single test to possibly close circuit %v", circuit.Name)
}
return swapped }
return false}
这段代码首先判断了熔断器是否开启,并且当前时间大于 上一次开启熔断器的时间+ SleepWindow 的时间,如果条件都符合的话,更新此熔断器最新的 openedOrLastTestedTime ,是通过 CompareAndSwapInt64 原子操作完成的,意外着必然只会有一个成功。
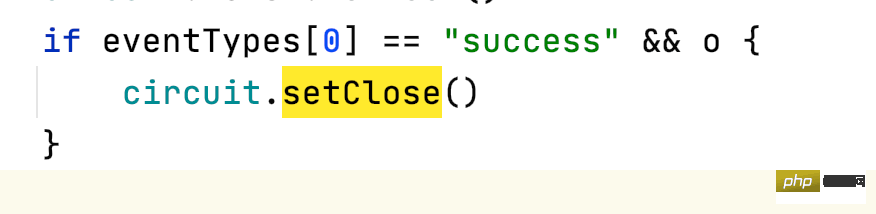
此时熔断器还是半开的状态,接着如果能拿到令牌,执行run 函数(也就是Do传入的第二个简单封装后的函数),发起 http 请求,如果成功,上报成功状态,关闭熔断器。如果失败,那么熔断器依旧开启。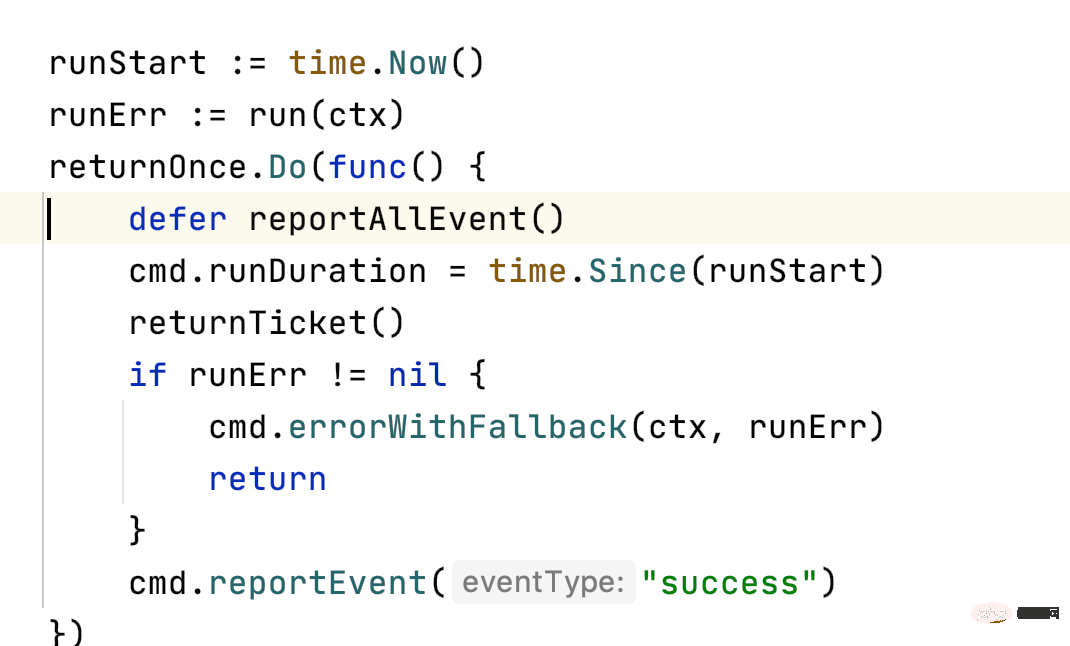
以上就是大体的流程讲解,下一篇文章将解读核心源码以及进一步当思考。
更多相关技术文章,请访问go语言教程栏目!
以上是详解 hystrix-go 使用与原理的详细内容。更多信息请关注PHP中文网其他相关文章!

 Golang的影响:速度,效率和简单性Apr 14, 2025 am 12:11 AM
Golang的影响:速度,效率和简单性Apr 14, 2025 am 12:11 AMGoimpactsdevelopmentPositationalityThroughSpeed,效率和模拟性。1)速度:gocompilesquicklyandrunseff,ifealforlargeprojects.2)效率:效率:ITScomprehenSevestAndArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdArdEcceSteral Depentencies,增强开发的简单性:3)SimpleflovelmentIcties:3)简单性。
 C和Golang:表演至关重要时Apr 13, 2025 am 12:11 AM
C和Golang:表演至关重要时Apr 13, 2025 am 12:11 AMC 更适合需要直接控制硬件资源和高性能优化的场景,而Golang更适合需要快速开发和高并发处理的场景。1.C 的优势在于其接近硬件的特性和高度的优化能力,适合游戏开发等高性能需求。2.Golang的优势在于其简洁的语法和天然的并发支持,适合高并发服务开发。
 Golang行动:现实世界中的示例和应用程序Apr 12, 2025 am 12:11 AM
Golang行动:现实世界中的示例和应用程序Apr 12, 2025 am 12:11 AMGolang在实际应用中表现出色,以简洁、高效和并发性着称。 1)通过Goroutines和Channels实现并发编程,2)利用接口和多态编写灵活代码,3)使用net/http包简化网络编程,4)构建高效并发爬虫,5)通过工具和最佳实践进行调试和优化。
 Golang:Go编程语言解释了Apr 10, 2025 am 11:18 AM
Golang:Go编程语言解释了Apr 10, 2025 am 11:18 AMGo语言的核心特性包括垃圾回收、静态链接和并发支持。1.Go语言的并发模型通过goroutine和channel实现高效并发编程。2.接口和多态性通过实现接口方法,使得不同类型可以统一处理。3.基本用法展示了函数定义和调用的高效性。4.高级用法中,切片提供了动态调整大小的强大功能。5.常见错误如竞态条件可以通过gotest-race检测并解决。6.性能优化通过sync.Pool重用对象,减少垃圾回收压力。
 Golang的目的:建立高效且可扩展的系统Apr 09, 2025 pm 05:17 PM
Golang的目的:建立高效且可扩展的系统Apr 09, 2025 pm 05:17 PMGo语言在构建高效且可扩展的系统中表现出色,其优势包括:1.高性能:编译成机器码,运行速度快;2.并发编程:通过goroutines和channels简化多任务处理;3.简洁性:语法简洁,降低学习和维护成本;4.跨平台:支持跨平台编译,方便部署。
 SQL排序中ORDER BY语句结果为何有时看似随机?Apr 02, 2025 pm 05:24 PM
SQL排序中ORDER BY语句结果为何有时看似随机?Apr 02, 2025 pm 05:24 PM关于SQL查询结果排序的疑惑学习SQL的过程中,常常会遇到一些令人困惑的问题。最近,笔者在阅读《MICK-SQL基础�...
 Golang互斥锁使用不当会导致'fatal error: sync: unlock of unlocked mutex”错误吗?如何避免这种问题?Apr 02, 2025 pm 05:18 PM
Golang互斥锁使用不当会导致'fatal error: sync: unlock of unlocked mutex”错误吗?如何避免这种问题?Apr 02, 2025 pm 05:18 PMgolang ...


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

Dreamweaver CS6
视觉化网页开发工具

螳螂BT
Mantis是一个易于部署的基于Web的缺陷跟踪工具,用于帮助产品缺陷跟踪。它需要PHP、MySQL和一个Web服务器。请查看我们的演示和托管服务。

DVWA
Damn Vulnerable Web App (DVWA) 是一个PHP/MySQL的Web应用程序,非常容易受到攻击。它的主要目标是成为安全专业人员在合法环境中测试自己的技能和工具的辅助工具,帮助Web开发人员更好地理解保护Web应用程序的过程,并帮助教师/学生在课堂环境中教授/学习Web应用程序安全。DVWA的目标是通过简单直接的界面练习一些最常见的Web漏洞,难度各不相同。请注意,该软件中

MinGW - 适用于 Windows 的极简 GNU
这个项目正在迁移到osdn.net/projects/mingw的过程中,你可以继续在那里关注我们。MinGW:GNU编译器集合(GCC)的本地Windows移植版本,可自由分发的导入库和用于构建本地Windows应用程序的头文件;包括对MSVC运行时的扩展,以支持C99功能。MinGW的所有软件都可以在64位Windows平台上运行。

SecLists
SecLists是最终安全测试人员的伙伴。它是一个包含各种类型列表的集合,这些列表在安全评估过程中经常使用,都在一个地方。SecLists通过方便地提供安全测试人员可能需要的所有列表,帮助提高安全测试的效率和生产力。列表类型包括用户名、密码、URL、模糊测试有效载荷、敏感数据模式、Web shell等等。测试人员只需将此存储库拉到新的测试机上,他就可以访问到所需的每种类型的列表。

