



AIxiv专栏是本站发布学术、技术内容的栏目。过去数年,本站AIxiv专栏接收报道了2000多篇内容,覆盖全球各大高校与企业的顶级实验室,有效促进了学术交流与传播。如果您有优秀的工作想要分享,欢迎投稿或者联系报道。投稿邮箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
论文标题: SpatialBot: Precise Depth Understanding with Vision Language Models 论文链接: https://arxiv.org/abs/2406.13642 项目主页: https://github.com/BAAI-DCAI/SpatialBot
 2. 抓取最中间的茶杯
2. 抓取最中间的茶杯 
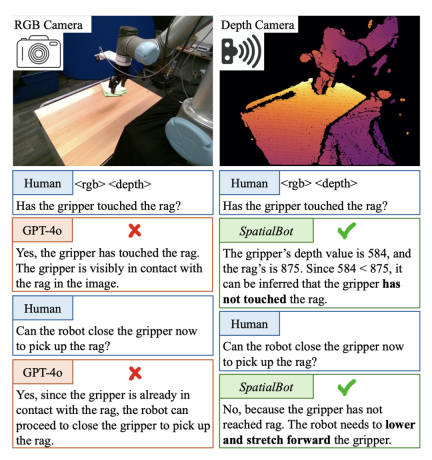
现有模型无法直接理解深度图输入。比如,图像编码器 CLIP/SigLIP 在 RGB 图像上训练,没有见过深度图。 现有大模型数据集,大多仅用 RGB 就可以分析、回答。因此,如果仅仅简单的将现有数据改为 RGBD 输入,模型不会主动到深度图中索引知识。需要专门设计任务和 QA,引导模型理解深度图、使用深度信息。
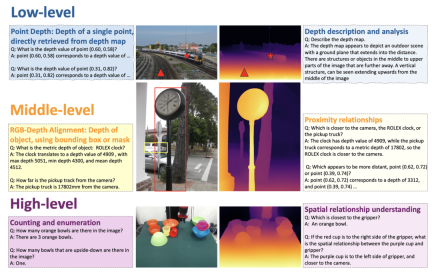
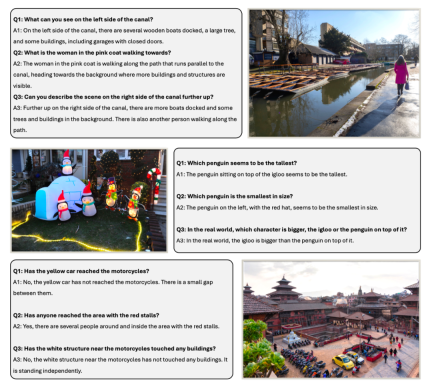
在 low level 引导模型理解深度图,引导从深度图直接获取信息; 在 middle level 让模型将 depth 与 RGB 对齐; 在 high level 设计多个深度相关任务,标注了 50k 的数据,让模型在理解深度图的基础上,使用深度信息完成任务。任务包括:空间位置关系,物体大小,物体接触与否,机器人场景理解等。
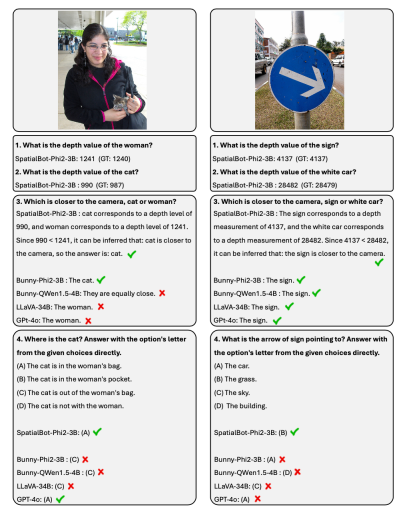


直接理解深度图,让模型看深度图,分析深度的分布,猜测其中可能包含的物体; 空间关系理解和推理; 机器人场景理解:描述 Open X-Embodiment 和本文收集的机器人数据中的场景、包含的物体、可能的任务,并人工标注物体、机器人的 bounding box。


以上是李飞飞「空间智能」之后,上交、智源、北大等提出空间大模型SpatialBot的详细内容。更多信息请关注PHP中文网其他相关文章!

 微软工作趋势指数2025显示工作场所容量应变Apr 24, 2025 am 11:19 AM
微软工作趋势指数2025显示工作场所容量应变Apr 24, 2025 am 11:19 AM由于AI的快速整合而加剧了工作场所的迅速危机危机,要求战略转变以外的增量调整。 WTI的调查结果强调了这一点:68%的员工在工作量上挣扎,导致BUR
 AI可以理解吗?中国房间的论点说不,但是对吗?Apr 24, 2025 am 11:18 AM
AI可以理解吗?中国房间的论点说不,但是对吗?Apr 24, 2025 am 11:18 AM约翰·塞尔(John Searle)的中国房间论点:对AI理解的挑战 Searle的思想实验直接质疑人工智能是否可以真正理解语言或具有真正意识。 想象一个人,对下巴一无所知
 中国的'智能” AI助手回应微软召回的隐私缺陷Apr 24, 2025 am 11:17 AM
中国的'智能” AI助手回应微软召回的隐私缺陷Apr 24, 2025 am 11:17 AM与西方同行相比,中国的科技巨头在AI开发方面的课程不同。 他们不专注于技术基准和API集成,而是优先考虑“屏幕感知” AI助手 - AI T
 Docker将熟悉的容器工作流程带到AI型号和MCP工具Apr 24, 2025 am 11:16 AM
Docker将熟悉的容器工作流程带到AI型号和MCP工具Apr 24, 2025 am 11:16 AMMCP:赋能AI系统访问外部工具 模型上下文协议(MCP)让AI应用能够通过标准化接口与外部工具和数据源交互。由Anthropic开发并得到主要AI提供商的支持,MCP允许语言模型和智能体发现可用工具并使用合适的参数调用它们。然而,实施MCP服务器存在一些挑战,包括环境冲突、安全漏洞以及跨平台行为不一致。 Forbes文章《Anthropic的模型上下文协议是AI智能体发展的一大步》作者:Janakiram MSVDocker通过容器化解决了这些问题。基于Docker Hub基础设施构建的Doc
 使用6种AI街头智能策略来建立一家十亿美元的创业Apr 24, 2025 am 11:15 AM
使用6种AI街头智能策略来建立一家十亿美元的创业Apr 24, 2025 am 11:15 AM有远见的企业家采用的六种策略,他们利用尖端技术和精明的商业敏锐度来创造高利润的可扩展公司,同时保持控制权。本指南是针对有抱负的企业家的,旨在建立一个
 Google照片更新解锁了您所有图片的惊人Ultra HDRApr 24, 2025 am 11:14 AM
Google照片更新解锁了您所有图片的惊人Ultra HDRApr 24, 2025 am 11:14 AMGoogle Photos的新型Ultra HDR工具:改变图像增强的游戏规则 Google Photos推出了一个功能强大的Ultra HDR转换工具,将标准照片转换为充满活力的高动态范围图像。这种增强功能受益于摄影师
 Descope建立AI代理集成的身份验证框架Apr 24, 2025 am 11:13 AM
Descope建立AI代理集成的身份验证框架Apr 24, 2025 am 11:13 AM技术架构解决了新兴的身份验证挑战 代理身份集线器解决了许多组织仅在开始AI代理实施后发现的问题,即传统身份验证方法不是为机器设计的
 Google Cloud Next 2025以及现代工作的未来Apr 24, 2025 am 11:12 AM
Google Cloud Next 2025以及现代工作的未来Apr 24, 2025 am 11:12 AM(注意:Google是我公司的咨询客户,Moor Insights&Strateging。) AI:从实验到企业基金会 Google Cloud Next 2025展示了AI从实验功能到企业技术的核心组成部分的演变,


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

螳螂BT
Mantis是一个易于部署的基于Web的缺陷跟踪工具,用于帮助产品缺陷跟踪。它需要PHP、MySQL和一个Web服务器。请查看我们的演示和托管服务。

禅工作室 13.0.1
功能强大的PHP集成开发环境

ZendStudio 13.5.1 Mac
功能强大的PHP集成开发环境

SublimeText3汉化版
中文版,非常好用

Atom编辑器mac版下载
最流行的的开源编辑器

