




车路协同的同步驾驶数据

车路协同辅助的自动驾驶V2X-AD(Vehicle-to-everything-aided autonomous driving)在提供更安全的驾驶策略方面具有巨大潜力。研究者们在V2X-AD的通信和通信层面进行了大量的研究,但是这些基础设施和通信资源在提高驾驶性能方面的效果仍未得到充分探索。这突显了研究协同自动驾驶的必要性,即如何设计面向驾驶规划的高效信息共享策略,从而提高每辆汽车驾驶性能。 这需要两个关键的基础条件:一个是能够为V2X-AD提供数据环境的平台,以及一个具有驾驶相关完整功能以及信息共享机制的端到端驾驶系统。 在提供数据环境的平台方面,可以利用车辆之间的通信网络以及基础设施的支持来实现。通过这种方式,车辆可以共享驾驶所需的实时和环境信息,从而提高驾驶性能。 另一方面,端到端驾驶系统需要具备完整的驾驶功能,并能够共享信息。这意味着驾驶系统应该能够获取来自其他车辆和基础设施的驾驶相关信息,并将这些信息与自身的驾驶规划相结合,以提供更高效的驾驶性能。 在实现这两个基础条件的同时,还需要考虑安全性和隐私保护。因此,设计V2X-AD的驾驶规划策略时,应该注重信息共享策略的高效性,并从而提高每辆汽车驾驶性能。 总结起来,车路协同辅助的自动驾驶V2X-AD具有巨大的潜力
"为此,来自上海交通大学和上海人工智能实验室的研究者们在新的研究文章《Towards Collaborative Autonomous Driving: Simulation Platform and End-to-End System》提出了CoDriving:一种端到端协同驾驶系统,该系统利用一种面向驾驶规划的信息共享策略实现了通信高效的协作。同时,本文研究者们搭建了仿真平台V2Xverse,该平台为协同驾驶提供了完整的训练测试环境,包含车路协同驱动数据集的生成、全栈协同驱动系统的部署、以及可定制场景下的闭环驱动性能评估和驾驶任务评估。"
同时,仿真平台V2Xverse集成了多个现有协同感知方法的训练和部署测试代码,用多种测试任务检验综合的驾驶能力:3D目标检测,路径规划,关闭环自动驾驶。V2Xverse突破了现有协同感知方法只能“看”不能“控制”的局限性,支持将现有的协同感知方法嵌入到完整的驾驶系统,并在仿真环境中测试驾驶性能。本文的研究者们相信这将为自动驾驶中基于视觉的车路协同研究带来更好的功能延展和更贴合实际驾驶场景的测试基准。
- 论文链接:https://arxiv.org/pdf/2404.09496
- 代码链接:https://github.com/CollaborativePerception/V2Xverse
研究背景和意义
本文的研究关注基于V2X(Vehicle-to-everything)通信的协同自动驾驶。相比于单车自动驾驶,协同自动驾驶通过车辆与周围环境(如路边单元、智能设备装备的行人等)之间的信息交换提升车辆辆感知能力与驾驶性能,这将有利于视野受限的复杂场景(如图1)下的安全驾驶。
 图 1. 危险的“鬼探头”场景,单车无法感知被遮挡的物体
图 1. 危险的“鬼探头”场景,单车无法感知被遮挡的物体
目前基于V2X的车路协同工作大多专注于优化模块级感知能力。然而,如何将协作感知能力用于提升集成系统中的最终驾驶性能仍然不足够的探索。
为了解决这一问题,本文旨在将协同感知能力扩展为涵盖全面驾驶能力的协同驾驶系统,包含感知,预测、规划和控制等关键模块。实现协同自动驾驶需要两个关键基础:一个能够为V2X-AD提供数据环境的平台;二是集成了完整驾驶相关功能和信息共享机制的端到端驾驶系统。从平台的角度,本工作搭建了V2Xverse,这是一个综合的协同自动驾驶仿真平台,提供了从车路协同驾驶数据集生成到全栈协作驾驶系统的部署和闭环驾驶性能评估的完整流程。从驾驶系统的角度,本文介绍了CoDriving,一种新的端到端协作驾驶系统,该系统在完整的自动驾驶框架中设计并嵌入了基于V2X通信的协作模块,通过共享感知信息提升协同驾驶性能。CoDriving的核心思想是一种新的面向驾驶规划的信息共享策略,使用在空间上稀疏但对驾驶重要的视觉特征信息作为通信内容,在优化通信效率的同时提高驾驶性能。
V2Xverse: 车路协同驾驶仿真平台
本文提出的V2Xverse的关键特征是能够实现与驾驶相关的子任务的离线基准生成和不同场景下驾驶性能的在线闭环评估,全面支持协同自动驾驶系统的开发。为了创建V2X-AD场景,V2Xverse在场景中设置了多辆配备了完整的驾驶能力的智能车,并通过一定策略在道路两旁放置路边单元,从而为智能车提供补充视野。为了支持协同自动驾驶方法的开发,V2Xverse首先提供了(车辆-车辆)以及(车辆-路边单元)的通信模块,并且为系统训练提供了完整的驾驶信号和专家标注,还为闭环驾驶评估提供了多种危险场景。仿真平台框架见图 2。
 图 2. V2Xverse 仿真平台框架
图 2. V2Xverse 仿真平台框架
与现有基于Carla的自动驾驶仿真平台相比,V2Xverse具有三个优势。首先,V2Xverse支持多车驾驶模拟,而主流的carla-leaderboard及其衍生平台仅支持单车驾驶模拟。第二,V2Xverse支持全驾驶功能模拟,而现有的协同感知仿真平台只支持与感知模块相关的功能。第三,V2Xverse支持全面的V2X-AD场景,包括多样化的传感器设备、模型集成和灵活的场景定制;见表 1。
 表 1. V2Xverse 与现有基于Carla的自动驾驶仿真平台的比较
表 1. V2Xverse 与现有基于Carla的自动驾驶仿真平台的比较
CoDriving: 面向高效协作的端到端自驾模型
CoDriving包括两个组成部分(见图 3):1)端到端的单车自动驾驶网络,将传感器输入转换为驾驶控制信号;2)面向驾驶的协作,协作者通过共享对驾驶关键的感知特征来实现高效通信,并通过特征聚合来增强单车BEV感知特征,增强后的感知特征将有利于系统产生更准确的感知识别结果和规划预测结果。
 图 3. CoDriving的整体框架
图 3. CoDriving的整体框架
端到端自动驾驶网络
端到端单车自动驾驶网络基于来自不同模态的输入来学习输出路径点预测,并通过一个控制模块将路径点转换为驾驶控制信号。为了实现这一点,CoDriving将驾驶所需的模块化组件集成到一个端到端的系统中,包括3D目标检测器、路径点预测器和控制器。CoDriving使用鸟瞰图(BEV)表示,因为它提供了一个统一的全局坐标系,避免了复杂的坐标转换,更好地支持基于空间信息的协作。
面向驾驶的协作策略
V2X协作通过信息共享解决单车不可避免的可见性受限问题。在这项工作中,本文提出了一种新的面向驾驶的协作策略,以同时优化驾驶性能和通信效率。该方案包括 i)基于驾驶意图的感知通信,CoDriving通过一个驾驶请求模块交换空间稀疏但对驾驶关键的BEV感知特征;以及 ii)BEV特征增强,CoDriving利用接收到的特征信息增强每个协作车辆的BEV感知特征。增强后的BEV特征将有利于系统产生更准确的感知识别结果和规划预测结果。
实验结果
利用V2Xverse仿真平台,本文在闭环驾驶,3D目标检测,路径点预测三个任务上对CoDriving的性能进行了检验。在关键的闭环驾驶测试中,相比于之前的单车端到端自动驾驶的SOTA方法, CoDriving的驾驶分数显着地提升了62.49%,行人碰撞率下降了53.50%。在目标检测与路径点预测任务中,CoDriving相比于其他协同方法表现更好,见表 2。
 表2. CoDriving 在闭环驾驶任务中优于SOTA的单体驾驶方法,在模块化的感知和规划子任务中优于其他协同感知方法
表2. CoDriving 在闭环驾驶任务中优于SOTA的单体驾驶方法,在模块化的感知和规划子任务中优于其他协同感知方法
本文同时对CoDriving在不同通信带宽下的协作表现进行了验证,在闭环驾驶,3D目标检测,路径点预测三个任务上,CoDriving在不同的通信带宽限制下优于其他协作方法,见图4。
 图 4. CoDriving 在不同通信带宽下的协作表现
图 4. CoDriving 在不同通信带宽下的协作表现
图 5展示了CoDriving在V2Xverse仿真环境中的驾驶案例。在图 5的场景中,一个视野盲区的行人突然冲出马路,可以看到单车自动驾驶视野受限,无法提前规避行人,造成了严重的车祸事故。而CoDriving利用路边单元的共享视野特征提前探测到了行人,从而安全避让。
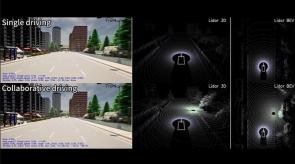
图5(1). 相比于视野受限的单车自驾,CoDriving 利用路边单元提供的信息检测到了视野盲区的行人 图5 (2). CoDriving成功规避行人,而单车自驾避让不及时造成了碰撞事故
图5 (2). CoDriving成功规避行人,而单车自驾避让不及时造成了碰撞事故
总结
本工作通过搭建仿真平台V2Xverse来帮助协同自动驾驶方法的开发,并提出了一种新的端到端自驾系统。其中,V2Xverse是一个支持闭环驾驶测试的V2X协同驾驶仿真平台,该平台为开发以提升最终驾驶性能为目标的协同自动驾驶系统提供了完整的开发渠道。值得一提的是,V2Xverse也支持多种现有单车自动驾驶系统的部署,以及多种现有协同感知方法的训练和闭环驾驶测试。同时,本文提出了一种新的端到端协同自动驾驶系统CoDriving,该系统通过共享驾驶关键感知信息来提高驾驶性能并优化通信效率。对整个驾驶系统的综合评估表明,CoDriving在不同的通信带宽上显着优于单车自驾系统。本文的研究者们相信V2Xverse平台和CoDriving系统为更可靠的自动驾驶提供了潜在的解决方案。
以上是开源!V2Xverse:上交发布首个面向V2X的仿真平台与端到端模型的详细内容。更多信息请关注PHP中文网其他相关文章!

 AI内部部署的隐藏危险:治理差距和灾难性风险Apr 28, 2025 am 11:12 AM
AI内部部署的隐藏危险:治理差距和灾难性风险Apr 28, 2025 am 11:12 AMApollo Research的一份新报告显示,先进的AI系统的不受检查的内部部署构成了重大风险。 在大型人工智能公司中缺乏监督,普遍存在,允许潜在的灾难性结果
 构建AI测谎仪Apr 28, 2025 am 11:11 AM
构建AI测谎仪Apr 28, 2025 am 11:11 AM传统测谎仪已经过时了。依靠腕带连接的指针,打印出受试者生命体征和身体反应的测谎仪,在识破谎言方面并不精确。这就是为什么测谎结果通常不被法庭采纳的原因,尽管它曾导致许多无辜者入狱。 相比之下,人工智能是一个强大的数据引擎,其工作原理是全方位观察。这意味着科学家可以通过多种途径将人工智能应用于寻求真相的应用中。 一种方法是像测谎仪一样分析被审问者的生命体征反应,但采用更详细、更精确的比较分析。 另一种方法是利用语言标记来分析人们实际所说的话,并运用逻辑和推理。 俗话说,一个谎言会滋生另一个谎言,最终
 AI是否已清除航空航天行业的起飞?Apr 28, 2025 am 11:10 AM
AI是否已清除航空航天行业的起飞?Apr 28, 2025 am 11:10 AM航空航天业是创新的先驱,它利用AI应对其最复杂的挑战。 现代航空的越来越复杂性需要AI的自动化和实时智能功能,以提高安全性,降低操作
 观看北京的春季机器人比赛Apr 28, 2025 am 11:09 AM
观看北京的春季机器人比赛Apr 28, 2025 am 11:09 AM机器人技术的飞速发展为我们带来了一个引人入胜的案例研究。 来自Noetix的N2机器人重达40多磅,身高3英尺,据说可以后空翻。Unitree公司推出的G1机器人重量约为N2的两倍,身高约4英尺。比赛中还有许多体型更小的类人机器人参赛,甚至还有一款由风扇驱动前进的机器人。 数据解读 这场半程马拉松吸引了超过12,000名观众,但只有21台类人机器人参赛。尽管政府指出参赛机器人赛前进行了“强化训练”,但并非所有机器人均完成了全程比赛。 冠军——由北京类人机器人创新中心研发的Tiangong Ult
 镜子陷阱:人工智能伦理和人类想象力的崩溃Apr 28, 2025 am 11:08 AM
镜子陷阱:人工智能伦理和人类想象力的崩溃Apr 28, 2025 am 11:08 AM人工智能以目前的形式并不是真正智能的。它擅长模仿和完善现有数据。 我们不是在创造人工智能,而是人工推断 - 处理信息的机器,而人类则
 新的Google泄漏揭示了方便的Google照片功能更新Apr 28, 2025 am 11:07 AM
新的Google泄漏揭示了方便的Google照片功能更新Apr 28, 2025 am 11:07 AM一份报告发现,在谷歌相册Android版7.26版本的代码中隐藏了一个更新的界面,每次查看照片时,都会在屏幕底部显示一行新检测到的面孔缩略图。 新的面部缩略图缺少姓名标签,所以我怀疑您需要单独点击它们才能查看有关每个检测到的人员的更多信息。就目前而言,此功能除了谷歌相册已在您的图像中找到这些人之外,不提供任何其他信息。 此功能尚未上线,因此我们不知道谷歌将如何准确地使用它。谷歌可以使用缩略图来加快查找所选人员的更多照片的速度,或者可能用于其他目的,例如选择要编辑的个人。我们拭目以待。 就目前而言
 加固芬特的指南 - 分析VidhyaApr 28, 2025 am 09:30 AM
加固芬特的指南 - 分析VidhyaApr 28, 2025 am 09:30 AM增强者通过教授模型根据人类反馈进行调整来震撼AI的开发。它将监督的学习基金会与基于奖励的更新融合在一起,使其更安全,更准确,真正地帮助
 让我们跳舞:结构化运动以微调我们的人类神经网Apr 27, 2025 am 11:09 AM
让我们跳舞:结构化运动以微调我们的人类神经网Apr 27, 2025 am 11:09 AM科学家已经广泛研究了人类和更简单的神经网络(如秀丽隐杆线虫中的神经网络),以了解其功能。 但是,出现了一个关键问题:我们如何使自己的神经网络与新颖的AI一起有效地工作


热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

ZendStudio 13.5.1 Mac
功能强大的PHP集成开发环境

SublimeText3汉化版
中文版,非常好用

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)

SublimeText3 Linux新版
SublimeText3 Linux最新版

