
比PID更丝滑的控制算法&卡内基梅隆大学

- 王林原创
- 2024-06-09 09:57:28858浏览

MPC控制算法,全称Model Predictive Control(模型预测控制),是一种基于系统动态模型的控制技术。它的工作原理是通过数学模型预测系统的未来行为,并基于这些预测结果来优化系统的控制输入,从而实现期望的输出。 MPC控制算法的核心思想是在每个控制周期内,通过对未来一段时间内的预测结果进行优化,以获得最佳的控制输入。这种优化是基于一些预测结果来优化系统的控制输入,从而实现期望的输出。 MPC控制算法的应用非常广泛,特别适用于需要满足一些约束条件的控制系统。通过结合系统模型和优化技术,MPC可以在不同的工业
MPC控制算法的核心在于其预测模型,这个模型可根据系统的当前状态信息预测未来的系统状态。预测模型的形式并不固定,可以是状态空间方程、传递函数、阶跃响应模型、脉冲响应模型、模糊模型等,具体形式取决于被控对象和需要预测的状态。
TinyMPC是一个专为凸模型预测控制量身定制的开源求解器,可提供高速计算。TinyMPC在C++中实现,具有最小的依赖性,特别适用于资产受限平台上的嵌入式控制和机器人应用程序。TinyMPC可以处理状态和输入边界以及二阶约束。Python、Julia和MATLAB接口可用于帮助生成嵌入式系统代码。
机器人演示
TinyMPC为强化隐私计算应用提供支持,可用于实现安全的多方计算和资源受限的处理平台之间的差距。将TinyMPC集成到计算能力不足的机器人中,使它们能够快速执行操作并表现出安全执行的优势。
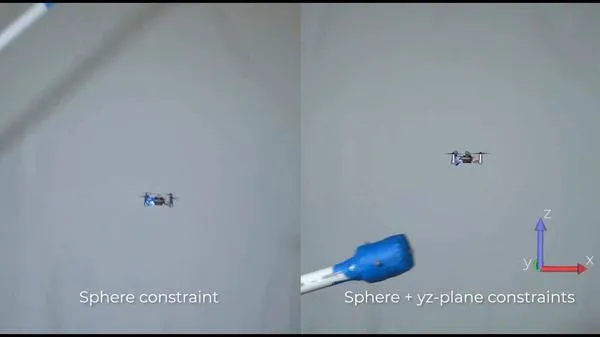
动态避障
TinyMPC 的运行速度足够快,可以在每个时间步长重新线性化约束,从而使其能够对移动的障碍物进行推理。在左边,在摇杆末端为中心的虚拟球体在每个时间步长被线性化为一组新的超平面约束。该算法还可以处理任意数量的任意意义数量的任意线性约束。例如,在右侧,它在停留在 yz 平面时避开了摇杆末端的摇杆的末端。
极致姿态恢复
TinyMPC可以在极端条件下开始恢复。在这个示例中,它与Crazyflie 2.1的原始控制器进行了比较。只有TinyMPC才能够突破控制极限,实现干净利落的恢复操作。
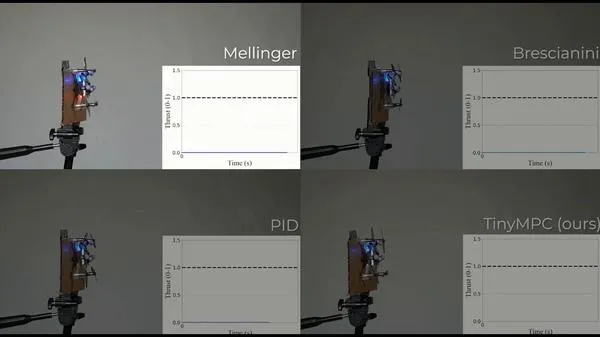
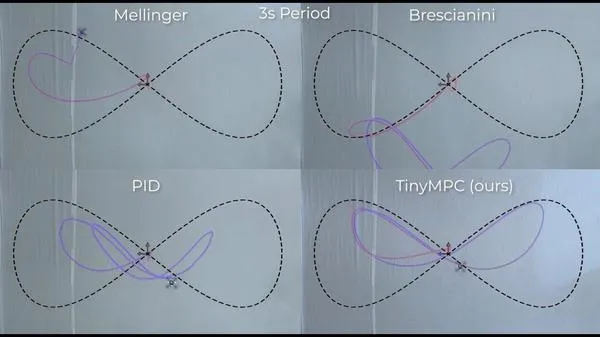
图 8 跟踪
我们使用了相同的库存控制器,以完成不可行的快速 8 字形跟踪任务(只有在无人机更强大的情况下才能完成单个 8 字形的时间)。TinyMPC 和 PID 能够保持竖立,但 TinyMPC 的轨迹更接近 8 字形。
微控制器基准测试
在微控制器基准测试中,TinyMPC 在速度和内存占用方面优于最先进的求解器。我们求解随机生成的基于 QP 的 MPC 问题,并将迭代时间和内存占用与 OSQP 进行比较。TinyMPC 在 OSQP 上的最大加速是 OSQP 的 8 倍,内存要少得多。

TinyMPC 现在也能够处理圆锥约束!在(b)中,我们将TinyMPC与两个现有的具有嵌入式支持的圆锥求解器(SCS和ECOS)对火箭软着陆问题进行了基准测试。TinyMPC 在 SCS 上实现了 13 倍的平均速度提升,在 ECOS 上实现了 137 倍的平均速度提升。

实时控制要求求解器在严格的时间窗口内返回解决方案。在火箭软着陆问题上比较了TinyMPC与SCS和ECOS的轨迹跟踪性能,同时人为地改变了每个求解的可用时间量。在所有控制持续时间内,TinyMPC 的违反约束更少,跟踪误差也低于 SCS 和 ECOS。

算法贡献者:
代码获取地址:
GitHub - TinyMPC/TinyMPC: Model-predictive control for microcontrollers
以上是比PID更丝滑的控制算法&卡内基梅隆大学的详细内容。更多信息请关注PHP中文网其他相关文章!