



從一個新穎的3D MLLM架構開始,該架構使用稀疏查詢將視覺表示提升和壓縮到3D,然後將其輸入LLM。
主題:OmniDrive: A Holistic LLM-Agent Framework for Autonomous Driving with 3D Perception Reasoning and Planning
作者單位:北京理工大學,NVIDIA,華中科技大學
#開源地址:GitHub - NVlabs/OmniDrive
多模態大語言模型(MLLMs)的發展導致了對基於LLM的自動駕駛的興趣不斷增長,利用它們強大的推理能力。利用MLLMs強大的推理能力來改進規劃行為是具有挑戰性的,因為它們需要超越2D推理的完整3D情境意識。為了解決這個挑戰,本工作提出了OmniDrive,這是一個關於智能體模型與3D驅動任務之間強大對齊的全面框架。框架從一個新穎的3D MLLM架構開始,該架構使用稀疏查詢將觀察表達提升和壓縮到3D,然後將其輸入LLM。這種基於查詢的表達允許我們聯合編碼動態物件和靜態地圖元素(例如,交通道路),為3D中的感知-行動對齊提供了一個簡潔的世界模型。進一步提出了一個新的基準,其中包括全面的視覺問答(VQA)任務,包括情境描述、交通規則、3D基礎、反事實推理、決策和規劃。廣泛的研究表明,OmniDrive在複雜的3D情境中具有出色的推理和規劃能力。
網路結構


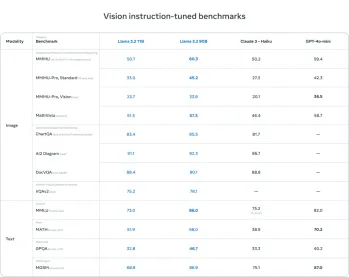
#實驗結果





以上是OmniDrive: 一個關於大模型與3D駕駛任務對齊的框架的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 閱讀AI索引2025:AI是您的朋友,敵人還是副駕駛?Apr 11, 2025 pm 12:13 PM
閱讀AI索引2025:AI是您的朋友,敵人還是副駕駛?Apr 11, 2025 pm 12:13 PM斯坦福大學以人為本人工智能研究所發布的《2025年人工智能指數報告》對正在進行的人工智能革命進行了很好的概述。讓我們用四個簡單的概念來解讀它:認知(了解正在發生的事情)、欣賞(看到好處)、接納(面對挑戰)和責任(弄清我們的責任)。 認知:人工智能無處不在,並且發展迅速 我們需要敏銳地意識到人工智能發展和傳播的速度有多快。人工智能係統正在不斷改進,在數學和復雜思維測試中取得了優異的成績,而就在一年前,它們還在這些測試中慘敗。想像一下,人工智能解決複雜的編碼問題或研究生水平的科學問題——自2023年
 開始使用Meta Llama 3.2 -Analytics VidhyaApr 11, 2025 pm 12:04 PM
開始使用Meta Llama 3.2 -Analytics VidhyaApr 11, 2025 pm 12:04 PMMeta的Llama 3.2:多模式和移動AI的飛躍 Meta最近公佈了Llama 3.2,這是AI的重大進步,具有強大的視覺功能和針對移動設備優化的輕量級文本模型。 以成功為基礎
 AV字節:Meta' llama 3.2,Google的雙子座1.5等Apr 11, 2025 pm 12:01 PM
AV字節:Meta' llama 3.2,Google的雙子座1.5等Apr 11, 2025 pm 12:01 PM本週的AI景觀:進步,道德考慮和監管辯論的旋風。 OpenAI,Google,Meta和Microsoft等主要參與者已經釋放了一系列更新,從開創性的新車型到LE的關鍵轉變
 與機器交談的人類成本:聊天機器人真的可以在乎嗎?Apr 11, 2025 pm 12:00 PM
與機器交談的人類成本:聊天機器人真的可以在乎嗎?Apr 11, 2025 pm 12:00 PM連接的舒適幻想:我們在與AI的關係中真的在蓬勃發展嗎? 這個問題挑戰了麻省理工學院媒體實驗室“用AI(AHA)”研討會的樂觀語氣。事件展示了加油
 了解Python的Scipy圖書館Apr 11, 2025 am 11:57 AM
了解Python的Scipy圖書館Apr 11, 2025 am 11:57 AM介紹 想像一下,您是科學家或工程師解決複雜問題 - 微分方程,優化挑戰或傅立葉分析。 Python的易用性和圖形功能很有吸引力,但是這些任務需要強大的工具
 3種運行Llama 3.2的方法-Analytics VidhyaApr 11, 2025 am 11:56 AM
3種運行Llama 3.2的方法-Analytics VidhyaApr 11, 2025 am 11:56 AMMeta's Llama 3.2:多式聯運AI強力 Meta的最新多模式模型Llama 3.2代表了AI的重大進步,具有增強的語言理解力,提高的準確性和出色的文本生成能力。 它的能力t
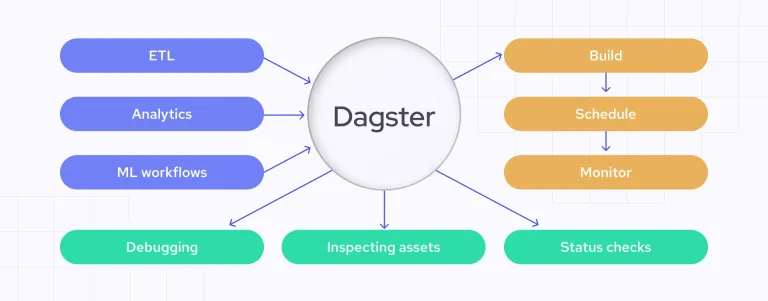 使用dagster自動化數據質量檢查Apr 11, 2025 am 11:44 AM
使用dagster自動化數據質量檢查Apr 11, 2025 am 11:44 AM數據質量保證:與Dagster自動檢查和良好期望 保持高數據質量對於數據驅動的業務至關重要。 隨著數據量和源的增加,手動質量控制變得效率低下,容易出現錯誤。
 大型機在人工智能時代有角色嗎?Apr 11, 2025 am 11:42 AM
大型機在人工智能時代有角色嗎?Apr 11, 2025 am 11:42 AM大型機:AI革命的無名英雄 雖然服務器在通用應用程序上表現出色並處理多個客戶端,但大型機是專為關鍵任務任務而建立的。 這些功能強大的系統經常在Heavil中找到


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

Atom編輯器mac版下載
最受歡迎的的開源編輯器

mPDF
mPDF是一個PHP庫,可以從UTF-8編碼的HTML產生PDF檔案。原作者Ian Back編寫mPDF以從他的網站上「即時」輸出PDF文件,並處理不同的語言。與原始腳本如HTML2FPDF相比,它的速度較慢,並且在使用Unicode字體時產生的檔案較大,但支援CSS樣式等,並進行了大量增強。支援幾乎所有語言,包括RTL(阿拉伯語和希伯來語)和CJK(中日韓)。支援嵌套的區塊級元素(如P、DIV),

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

Dreamweaver Mac版
視覺化網頁開發工具

記事本++7.3.1
好用且免費的程式碼編輯器

