
3D視覺繞不開的點雲配準!一文搞懂所有主流方案與挑戰

- PHPz轉載
- 2024-04-02 11:31:131000瀏覽
作為點集合的點雲有望透過3D重建、工業檢測和機器人操作中,在獲取和生成物體的三維(3D)表面資訊方面帶來一場改變。最具挑戰性但必不可少的過程是點雲配準,即獲得一個空間變換,該變換將在兩個不同座標中獲得的兩個點雲對齊並匹配。這篇綜述介紹了點雲配準的概述和基本原理,對各種方法進行了系統的分類和比較,並解決了點雲配準中存在的技術問題,試圖為該領域以外的學術研究人員和工程師提供指導,並促進點雲配準統一願景的討論。
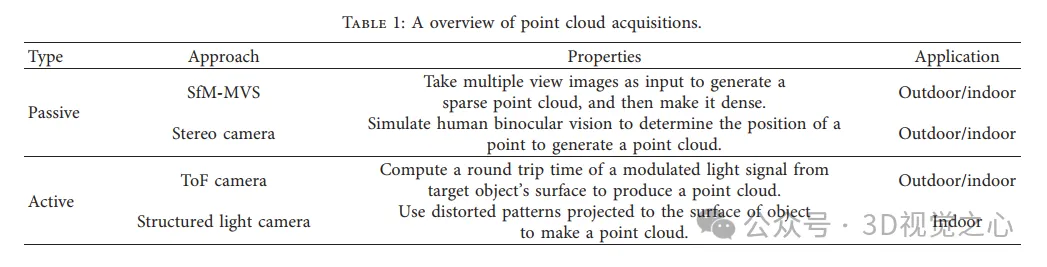
點雲獲取的一般方式
分為主動和被動方式,由感測器主動獲取的點雲為主動方式,後期通過重建的方式為被動。
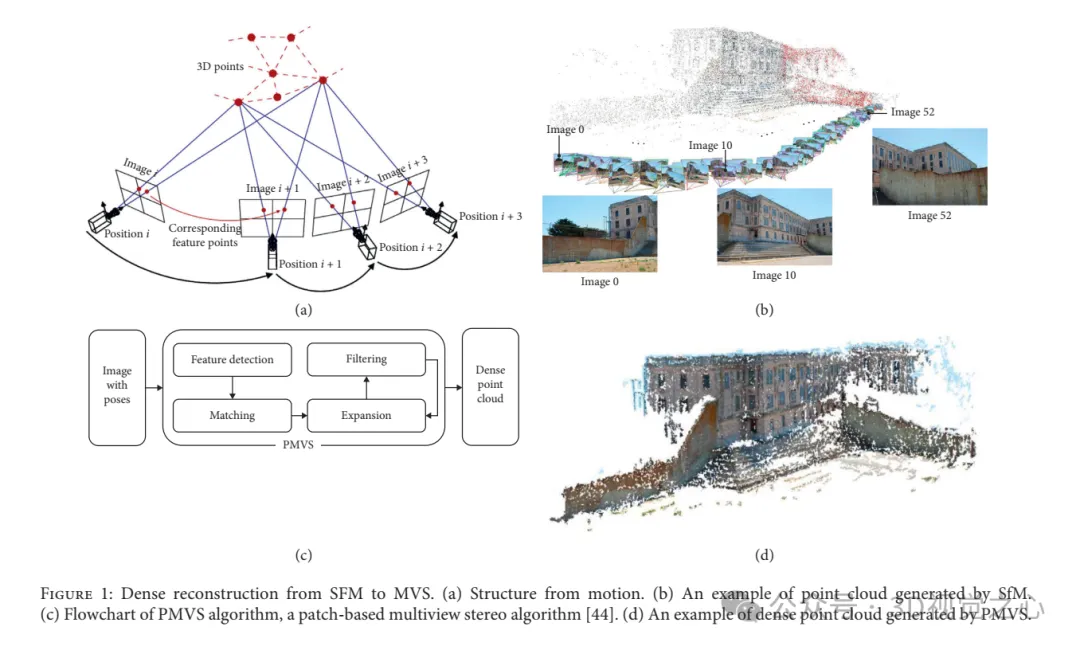
從SFM到MVS的密集重建。 (a)SFM。 (b)SfM產生的點雲範例。 (c)PMVS演算法流程圖,一種基於patch的多視角立體演算法。 (d)PMVS產生的密集點雲範例。
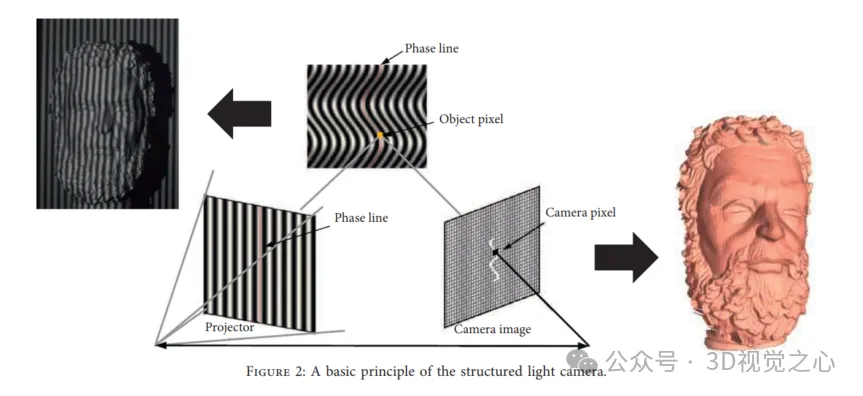
結構光重建方法:
#剛性配準與非剛性配準
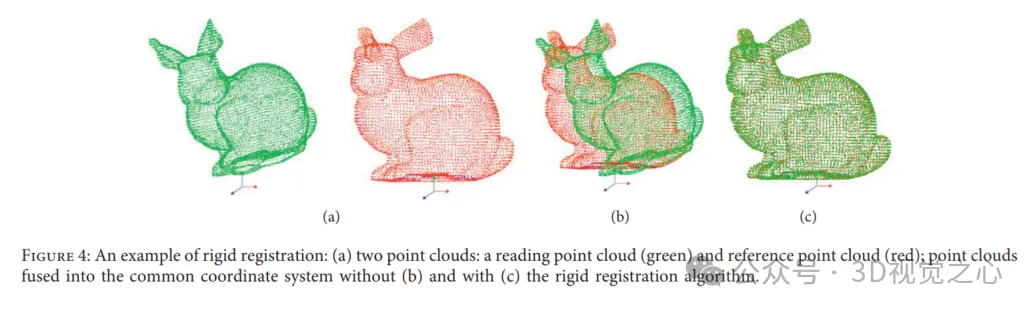
在一個環境中,變換可以分解為旋轉和平移,在適當的剛性變換後,一個點雲被映射到另一點雲,同時保持相同的形狀和大小。
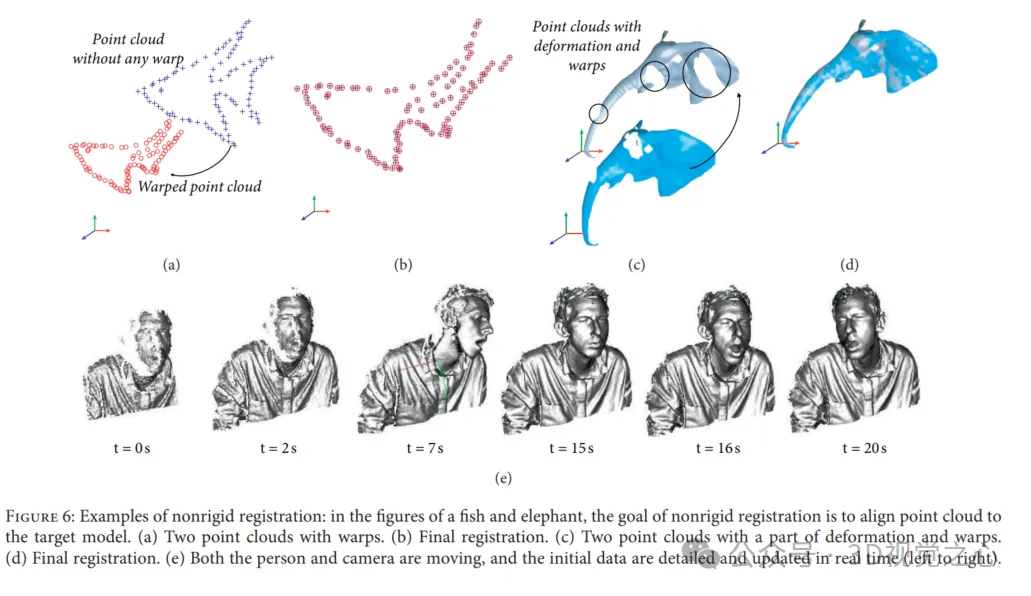
在非剛性配準中,建立非剛性變換以將掃描資料wrap到目標點雲。非剛性變換包含反射、旋轉、縮放和平移,而不是剛性配準僅包含平移和旋轉。非剛性配準的使用主要有兩個原因:(1) 資料收集的非線性和校準誤差會導致剛性物體掃描的低頻扭曲;(2) 對隨著時間改變其形狀和移動場景或目標執行配準。
剛性配準的範例:(a)兩個點雲:讀取點雲(綠色)和參考點雲(紅色);不使用(b)和使用(c)剛性配準演算法的情況下,點雲融合到公共座標系中。
然而,點雲配準的效能被Variant Overlap、雜訊和異常值、高運算成本、配準成功的各種指標受限。
配準的方法有哪些?
在過去的幾十年裡,人們提出了越來越多的點雲配準方法,從經典的ICP演算法到與深度學習技術相結合的解決方案。
1)ICP方案
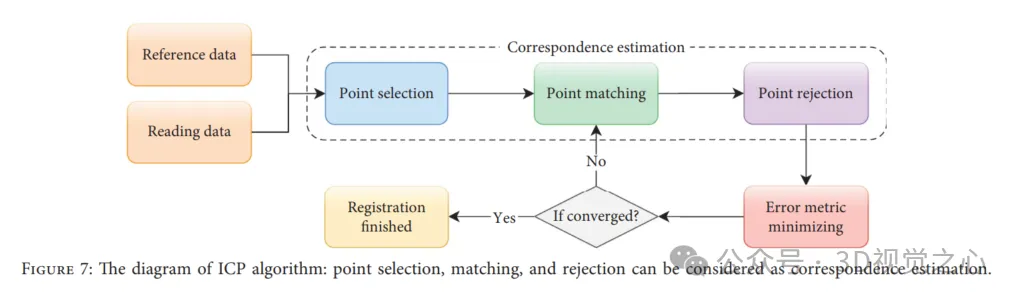
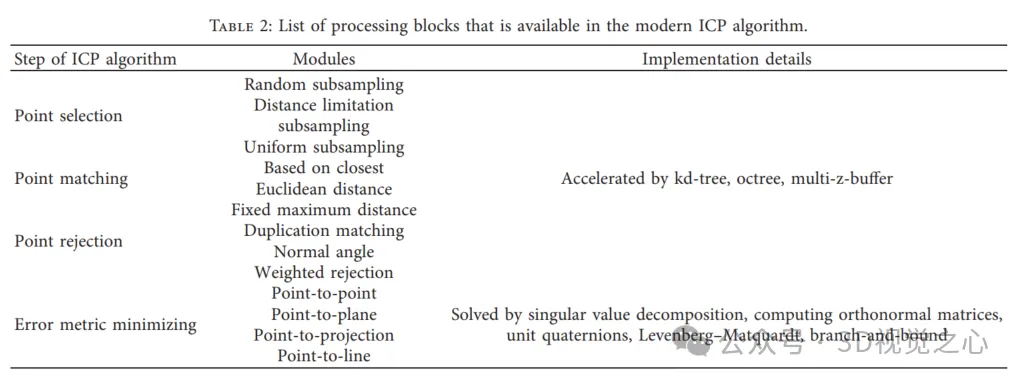
ICP演算法是一種迭代演算法,可在理想條件下確保配準的準確性、收斂速度和穩定性。從某種意義上說,ICP可以被視為期望最大化(EM)問題,因此它基於對應關係計算和更新新的變換,然後應用於讀取數據,直到誤差度量收斂。然而,這並不能保證ICP達到全域最優,ICP演算法可以大致分為四個步驟:如下圖所示,點選擇、點匹配、點拒絕和誤差度量最小化。
2)基於特徵的方法
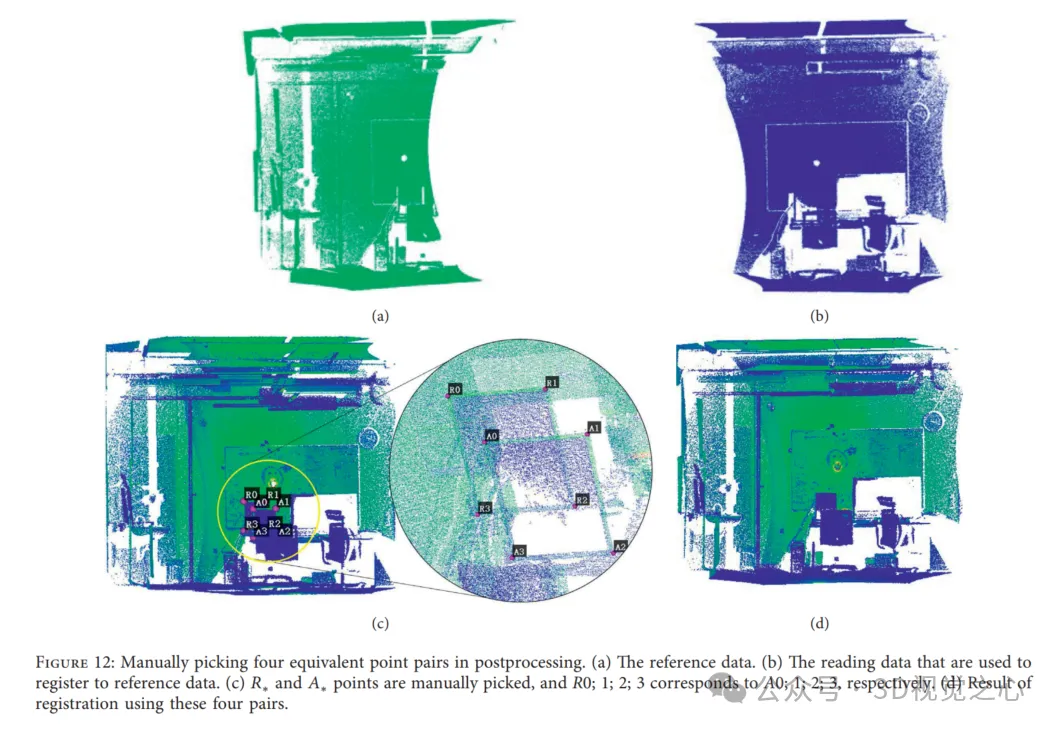
正如我們在基於ICP的演算法中所看到的,在變換估計之前,建立對應關係是至關重要的。如果我們獲得描述兩個點雲之間正確關係的適當對應關係,則可以保證最終結果。因此,我們可以在掃描目標上貼上地標,或者在後處理中手動拾取等效點對,以計算感興趣點(拾取點)的變換,這種變換最終可以應用於讀取點雲。如圖12(c)所示,點雲載入在同一座標系中,並繪製成不同的顏色。圖12(a)和12(b)顯示了在不同視點捕獲的兩個點雲,分別從參考資料和讀取資料中選擇點對,配準結果如圖12(d)所示。然而,這些方法對不能附著地標的測量對象既不友好,也不能應用於需要自動配準的應用。同時,為了最小化對應關係的搜尋空間,並避免在基於ICP的演算法中假設初始變換,引入了基於特徵的配準,其中提取了研究人員設計的關鍵點。通常,關鍵點檢測和對應關係建立是此方法的主要步驟。
關鍵點擷取的常用方法包括PFH、SHOT等,設計一種演算法來移除異常值和有效地基於inliers的估計變換同樣很重要。
3)基於學習的方法
在使用點雲作為輸入的應用程式中,估計特徵描述符的傳統策略在很大程度上依賴點雲中目標的獨特幾何特性。然而,現實世界的數據往往因目標而異,可能包含平面、異常值和雜訊。此外,去除的失配通常包含有用的信息,可以用於學習。基於學習的技術可以適用於對語義資訊進行編碼,並且可以在特定任務中推廣。大多數與機器學習技術整合的配準策略比經典方法更快、更穩健,並靈活地擴展到其他任務,如物體姿勢估計和物體分類。同樣,基於學習的點雲配準的一個關鍵挑戰是如何提取對點雲的空間變化不變、對噪音和異常值更具穩健性的特徵。
以學習為基礎的方法代表作為:PointNet 、PointNet 、PCRNet 、Deep Global Registration 、Deep Closest Point、Partial Registration Network 、Robust Point Matching 、PointNetLK 、3DRegNet。
4)具有機率密度函數的方法
基於機率密度函數(PDF)的點雲配準,使得使用統計模型進行配準是一個研究得很好的問題,該方法的關鍵思想是用特定的機率密度函數表示數據,如高斯混合模型(GMM)和常態分佈(ND)。配準任務被重新表述為對齊兩個相應分佈的問題,然後是測量和最小化它們之間的統計差異的目標函數。同時,由於PDF的表示,點雲可以被視為一個分佈,而不是許多單獨的點,因此它避免了對應關係的估計,並且具有良好的抗噪聲性能,但通常比基於ICP的方法慢。
5)其它方法
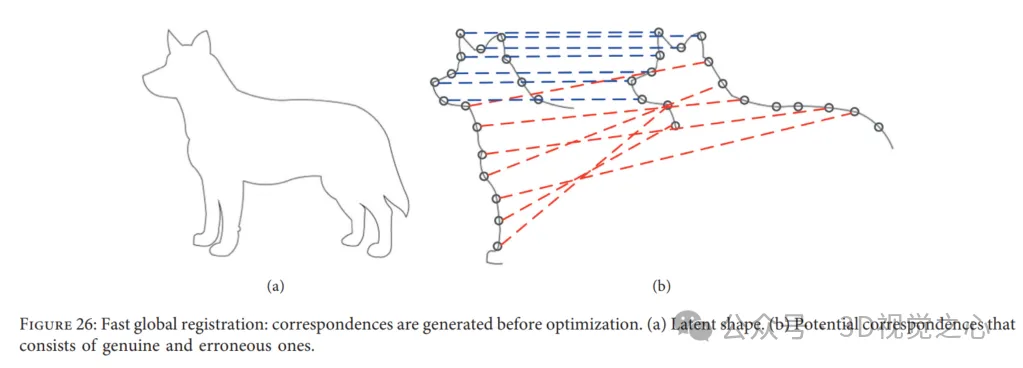
Fast Global Registration 。快速全域配準(FGR)為點雲配準提供了一種無需初始化的快速策略。具體來說,FGR對覆蓋的表面的候選匹配進行操作並且不執行對應關係更新或最近點查詢,該方法的特殊之處在於,可以直接透過在表面上密集定義的穩健目標的單一最佳化來產生聯合配準。然而,現有的解決點雲配準的方法通常在兩個點雲之間產生候選或多個對應關係,然後計算和更新全域結果。此外,在快速全域配準中,在最佳化中會立即建立對應關係,並且不會在以下步驟中再次進行估計。因此,避免了昂貴的最近鄰查找,以保持低的計算成本。結果,迭代步驟中用於每個對應關係的線性處理和用於姿態估計的線性系統是有效的。 FGR在多個資料集上進行評估,如UWA基準和Stanford Bunny,與點對點和點頂線的ICP以及Go ICP等ICP變體進行比較。實驗顯示FGR在存在噪音的情況下表現出色!
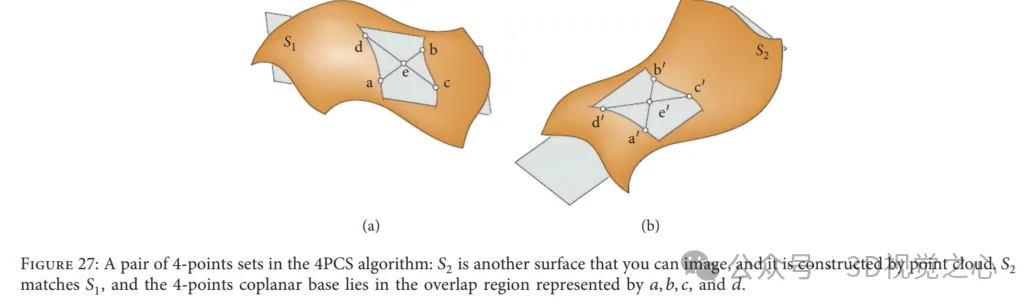
四點一致集演算法:4點全等集(4PCS)提供了用於讀取資料的初始變換,而不需要起始位置假設。通常,兩點雲之間的剛性配準變換可以由一對三元組唯一定義,其中一個來自參考數據,另一個來自讀取數據。然而,在這種方法中,它透過在小的潛在集合中搜尋來尋找特殊的 4-points bases,即每個點雲中的4共面全等點,如圖27所示。在最大公共點集(LCP)問題中求解最佳剛性變換。當成對點雲的重疊率較低且存在異常值時,此演算法實現了接近的效能。為了適應不同的應用,許多研究人員介紹了與經典4PCS解決方案相關的更重要的工作。
以上是3D視覺繞不開的點雲配準!一文搞懂所有主流方案與挑戰的詳細內容。更多資訊請關注PHP中文網其他相關文章!