
LimSim++:多模態大模型在自動駕駛中的新舞台

- PHPz轉載
- 2024-03-12 15:10:111225瀏覽
論文名稱:LimSim : A Closed-Loop Platform for Deploying Multimodal LLMs in Autonomous Driving
專案首頁:https://pjlab-adg.github.io/ limsim_plus/

模擬器簡介
隨著多模態大語言模型((M)LLM)在人工智慧領域掀起研究熱潮,在自動駕駛技術的應用逐漸成為關注的焦點。這些模型透過強大的廣義理解和邏輯推理能力,為建立安全可靠的自動駕駛系統提供了有力支持。雖然已有閉迴路模擬平台如HighwayEnv、CARLA和NuPlan等,能夠驗證LLM在自動駕駛中的表現,但使用者通常需要自行適配這些平台,這不僅提高了使用門檻,也限制了LLM能力的深入挖掘。
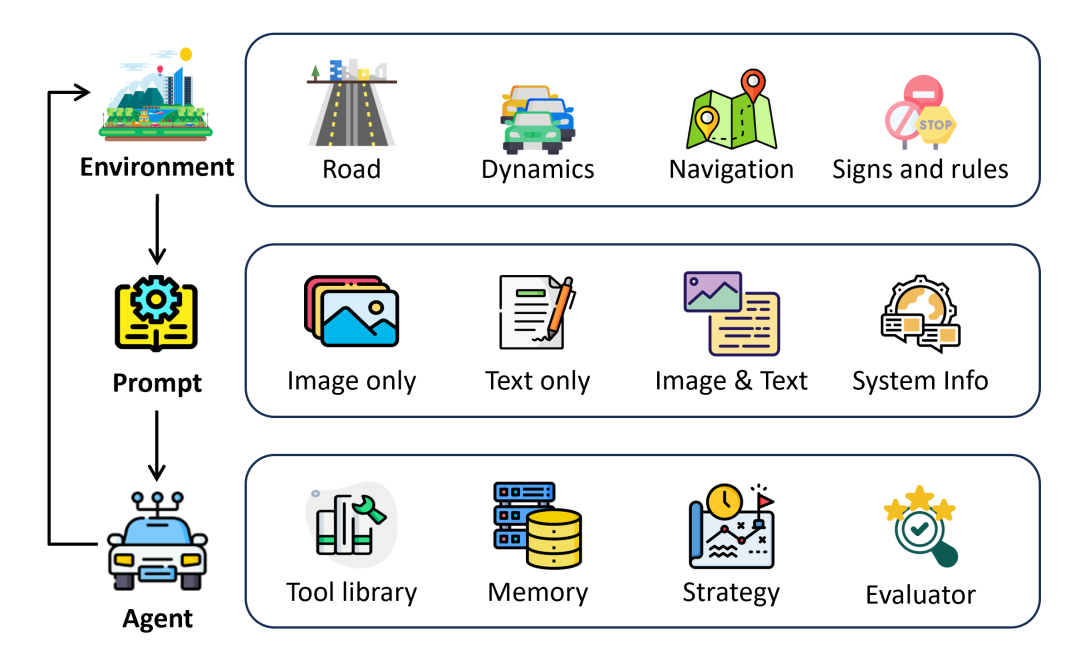
為了克服這個挑戰,上海人工智慧實驗室的智慧交通平台組推出了**LimSim **,這是一款專為(M)LLM設計的自動駕駛閉環模擬平台。 LimSim 的推出,旨在為自動駕駛領域的研究者提供一個更適宜的環境,以全面探索LLM在自動駕駛技術中的潛力。該平台能夠提取並處理來自SUMO和CARLA等模擬環境的場景訊息,將其轉換為LLM所需的多種輸入形式,包括影像資訊、場景認知和任務描述。此外,LimSim 還具備運動原語轉換功能,能根據LLM的決策快速產生適當的行車軌跡,實現閉迴路模擬。更重要的是,LimSim 為LLM創造了一個持續學習的環境,透過評估決策結果並提供回饋,幫助LLM不斷優化駕駛策略,提高Driver Agent的駕駛性能。
模擬器特點
LimSim 在自動駕駛模擬領域具有顯著特點,為(M)LLM驅動的Driver Agent提供了理想的閉迴路模擬和持續學習環境。
- LimSim 支援多種駕駛場景的模擬,如十字路口、匝道和環島等,確保Driver Agent能夠在各種複雜路況下接受挑戰。這種多樣化的場景設定有助於LLM獲取更豐富的駕駛經驗,並提高其在真實環境中的適應能力。
- LimSim 支援多種模態輸入的大語言模型。 LimSim 不僅提供基於規則的場景資訊生成,同時可以與CARLA聯調,能夠提供豐富的視覺輸入,滿足(M)LLM在自動駕駛中的視覺感知需求。
- LimSim 著重持續學習能力。 LimSim 整合了評估、反思和記憶等模組,幫助(M)LLM在模擬過程中不斷累積經驗,優化決策策略。
建立屬於自己的Driver Agent
#LimSim 為使用者提供了豐富的接口,可以滿足Driver Agent的客製化需求,提高了LimSim 開發的靈活性,並且降低了使用門檻。
- Prompt建構
- LimSim 支援使用者自訂prompt,從而改變輸入給(M)LLM的文字訊息,包括角色設定、任務要求、場景描述等資訊。
- LimSim 提供了基於json格式的場景描述模板,支援使用者零碼進行prompt的修改,無需考慮資訊擷取的具體實作。
- 決策評估模組
- #LimSim 提供了對(M)LLM決策結果進行評估的baseline,使用者可以透過改變權重參數來調節評估偏好。
- 框架的靈活性
- #LimSim 支援使用者為(M)LLM新增自訂的工具庫,例如感知工具、數值處理工具等等。
快速上手
- Step 0:安裝SUMO(Version≥v1.15.0, ubuntu)
sudo add-apt-repository ppa:sumo/stablesudo apt-get updatesudo apt-get install sumo sumo-tools sumo-doc
- Step 1:下載LimSim 原始碼壓縮包,解壓縮後切換到正確分支
git clone https://github.com/PJLab-ADG/LimSim.gitgit checkout -b LimSim_plus
- Step 2:安裝依賴(要求裝有conda)
cd LimSimconda env create -f environment.yml
- Step 3: 執行模擬
- 單獨執行模擬
python ExampleModel.py
- 使用LLM進行自動駕駛
export OPENAI_API_KEY='your openai key'python ExampleLLMAgentCloseLoop.py
- 使用VLM進行自動駕駛
# Terminal 1cd path-to-carla/./CarlaUE4.sh# Termnial 2cd path-to-carla/cd PythonAPI/util/python3 config.py --map Town06# Termnial 2export OPENAI_API_KEY='your openai key'cd path-to-LimSim++/python ExampleVLMAgentCloseLoop.py更多內容請查看LimSim 的github:https:// github.com/PJLab-ADG/LimSim/tree/LimSim_plus,如有其他疑問請在GitHub的Issues中提出或直接郵件與我們聯繫! 歡迎學術界和工業界小夥伴共同開發LimSim ,共建開源生態!
以上是LimSim++:多模態大模型在自動駕駛中的新舞台的詳細內容。更多資訊請關注PHP中文網其他相關文章!