
毫末Cam4DOcc入選CVPR2024:僅用攝影機做4D佔據網路預測,讓自動駕駛擁有時空預測能力

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2024-03-07 14:19:021162瀏覽
2024年2月27日,毫末智行人工智慧技術團隊提交的論文《Cam4DOcc: Benchmark for Camera-Only 4D Occupancy Forecasting in Autonomous Driving Applications》成功入選國際頂會 CVPR 2024。
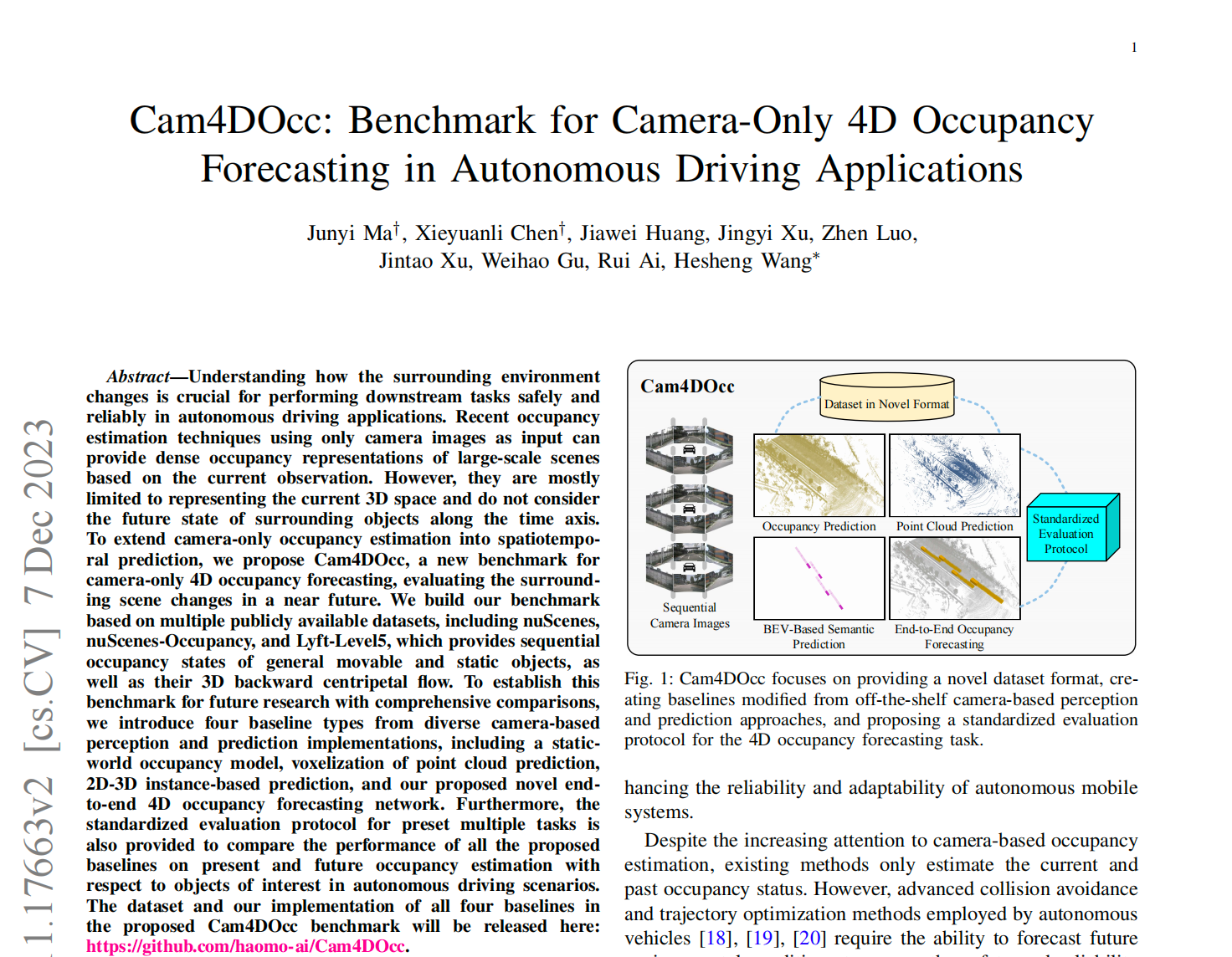
Cam4DOcc是毫末提出的一種新的基準,它利用相機進行4D佔據網格預測。這種方法可以評估近期內周圍場景的變化,將攝影機的佔據網格估計擴展到時空預測。這樣一來,自動駕駛系統在感知和預測周圍環境動態變化方面的能力得到了提升。
首先,毫末基於幾個公開可用的資料集創建了新格式的資料集,並進一步提出了標準化的評估協議以及四種基線類型,為 Cam4DOcc 基準提供基本參考。其次,毫末提出了第一個基於攝影機的 4D 佔據預測網路 OCFNet,以端到端的方式估計未來的佔據狀態。最後,毫末基於 Cam4DOcc 基準,進行了多個實驗,涉及四種不同的任務,以全面評估所提出的基線以及 OCFNet。實驗結果表明,OCFNet 優於所有基線,即使在看到有限的訓練資料時仍能產生合理的未來佔據。透過比較四種不同類型的基線,毫末證明了端到端時空網路可能是僅利用攝影機進行佔據預測的最有前途的研究方向。此外,使用膨脹的 GMO 標註和額外的 3D 反向徑向流也被驗證是對於 4D 佔據預測有益的。

電腦視覺與模式識別會議(IEEE Conference on Computer Vision and Pattern Recognition,簡稱:CVPR)是電腦視覺與模式識別領域的三大頂級會議之一,由紐卡斯爾大學、雪梨科技大學、約翰霍普金斯大學等頂尖名校和機構所舉辦。 CVPR 有著非常嚴苛的錄取標準,毫末提出Cam4DOcc方法的論文成功入選 CVPR2024,代表了對毫末技術探索成果的認可。
自成立以來,毫末始終立足技術創新,不斷取得眾多引領產業的技術專利成果,並在國內率先佈局大模型、大算力、大數據的自動駕駛技術發展方向。毫末發布的行業首個自動駕駛生成式大模型DriveGPT 雪湖·海若,在自動駕駛系統開發過程中帶來了巨大的技術提升,使得毫末自動駕駛系統開發徹底進入了全新模式,也極大加速汽車智能化的發展進程。
以上是毫末Cam4DOcc入選CVPR2024:僅用攝影機做4D佔據網路預測,讓自動駕駛擁有時空預測能力的詳細內容。更多資訊請關注PHP中文網其他相關文章!