


根據OpenHarmony官方公眾號訊息,樂聚旗下的"誇父"機器人今日宣布透過OpenHarmony 3.2 Release版本的兼容性測評

據報道,誇父機器人是由深圳開鴻聯合樂聚機器人技術有限公司(簡稱“樂聚”)共同開發的,被稱為是“國內首款具備跳躍和適應多種地形行走能力的開源鴻蒙人形機器人”

▲ 圖片來源 樂聚官網(下同)
IT之家從訊息中了解到,該機器人搭載了深開鴻基於開源鴻蒙研發的KaihongOS作業系統,採用了全端開源設計,並且運動控制器完全開源。該機器人可以連接軌跡規劃、反饋控制、狀態估計等模組,而且其步態演算法聲稱可以適應各種地形,包括沙地、草地和障礙物等,並且可以跳躍高度達到20厘米

在感知方面,這款機器人可以搭載各種不同的開鴻感測器,並且配備了深度攝影機。它還可以搭配多種末端配件進行二次開發,並且可以與主流大模型進行對接

以上是樂聚人形機器人「誇父」透過 OpenHarmony 3.2 相容性驗證的詳細內容。更多資訊請關注PHP中文網其他相關文章!

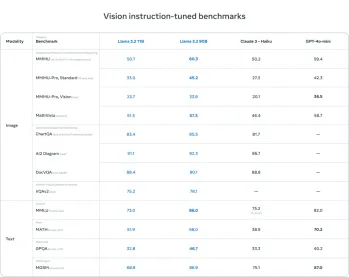
 閱讀AI索引2025:AI是您的朋友,敵人還是副駕駛?Apr 11, 2025 pm 12:13 PM
閱讀AI索引2025:AI是您的朋友,敵人還是副駕駛?Apr 11, 2025 pm 12:13 PM斯坦福大學以人為本人工智能研究所發布的《2025年人工智能指數報告》對正在進行的人工智能革命進行了很好的概述。讓我們用四個簡單的概念來解讀它:認知(了解正在發生的事情)、欣賞(看到好處)、接納(面對挑戰)和責任(弄清我們的責任)。 認知:人工智能無處不在,並且發展迅速 我們需要敏銳地意識到人工智能發展和傳播的速度有多快。人工智能係統正在不斷改進,在數學和復雜思維測試中取得了優異的成績,而就在一年前,它們還在這些測試中慘敗。想像一下,人工智能解決複雜的編碼問題或研究生水平的科學問題——自2023年
 開始使用Meta Llama 3.2 -Analytics VidhyaApr 11, 2025 pm 12:04 PM
開始使用Meta Llama 3.2 -Analytics VidhyaApr 11, 2025 pm 12:04 PMMeta的Llama 3.2:多模式和移動AI的飛躍 Meta最近公佈了Llama 3.2,這是AI的重大進步,具有強大的視覺功能和針對移動設備優化的輕量級文本模型。 以成功為基礎
 AV字節:Meta' llama 3.2,Google的雙子座1.5等Apr 11, 2025 pm 12:01 PM
AV字節:Meta' llama 3.2,Google的雙子座1.5等Apr 11, 2025 pm 12:01 PM本週的AI景觀:進步,道德考慮和監管辯論的旋風。 OpenAI,Google,Meta和Microsoft等主要參與者已經釋放了一系列更新,從開創性的新車型到LE的關鍵轉變
 與機器交談的人類成本:聊天機器人真的可以在乎嗎?Apr 11, 2025 pm 12:00 PM
與機器交談的人類成本:聊天機器人真的可以在乎嗎?Apr 11, 2025 pm 12:00 PM連接的舒適幻想:我們在與AI的關係中真的在蓬勃發展嗎? 這個問題挑戰了麻省理工學院媒體實驗室“用AI(AHA)”研討會的樂觀語氣。事件展示了加油
 了解Python的Scipy圖書館Apr 11, 2025 am 11:57 AM
了解Python的Scipy圖書館Apr 11, 2025 am 11:57 AM介紹 想像一下,您是科學家或工程師解決複雜問題 - 微分方程,優化挑戰或傅立葉分析。 Python的易用性和圖形功能很有吸引力,但是這些任務需要強大的工具
 3種運行Llama 3.2的方法-Analytics VidhyaApr 11, 2025 am 11:56 AM
3種運行Llama 3.2的方法-Analytics VidhyaApr 11, 2025 am 11:56 AMMeta's Llama 3.2:多式聯運AI強力 Meta的最新多模式模型Llama 3.2代表了AI的重大進步,具有增強的語言理解力,提高的準確性和出色的文本生成能力。 它的能力t
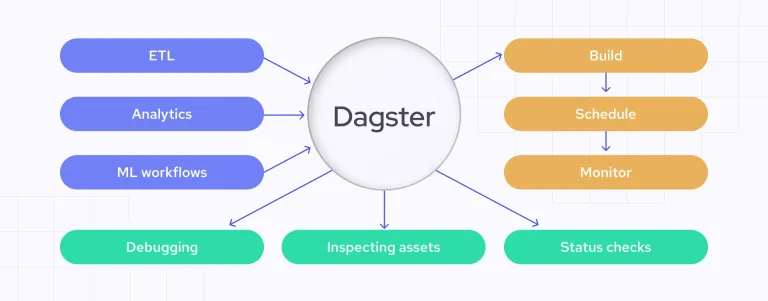 使用dagster自動化數據質量檢查Apr 11, 2025 am 11:44 AM
使用dagster自動化數據質量檢查Apr 11, 2025 am 11:44 AM數據質量保證:與Dagster自動檢查和良好期望 保持高數據質量對於數據驅動的業務至關重要。 隨著數據量和源的增加,手動質量控制變得效率低下,容易出現錯誤。
 大型機在人工智能時代有角色嗎?Apr 11, 2025 am 11:42 AM
大型機在人工智能時代有角色嗎?Apr 11, 2025 am 11:42 AM大型機:AI革命的無名英雄 雖然服務器在通用應用程序上表現出色並處理多個客戶端,但大型機是專為關鍵任務任務而建立的。 這些功能強大的系統經常在Heavil中找到


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

VSCode Windows 64位元 下載
微軟推出的免費、功能強大的一款IDE編輯器

SublimeText3 英文版
推薦:為Win版本,支援程式碼提示!

禪工作室 13.0.1
強大的PHP整合開發環境

mPDF
mPDF是一個PHP庫,可以從UTF-8編碼的HTML產生PDF檔案。原作者Ian Back編寫mPDF以從他的網站上「即時」輸出PDF文件,並處理不同的語言。與原始腳本如HTML2FPDF相比,它的速度較慢,並且在使用Unicode字體時產生的檔案較大,但支援CSS樣式等,並進行了大量增強。支援幾乎所有語言,包括RTL(阿拉伯語和希伯來語)和CJK(中日韓)。支援嵌套的區塊級元素(如P、DIV),

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)

