
合成非模態感知資料集AmodalSynthDrive:自動駕駛的創新解決方案

- 王林轉載
- 2023-10-11 12:09:031402瀏覽
- 論文連結:https://arxiv.org/pdf/2309.06547.pdf
- 資料集連結: http://amodalsynthdrive.cs.uni-freiburg.de
#摘要
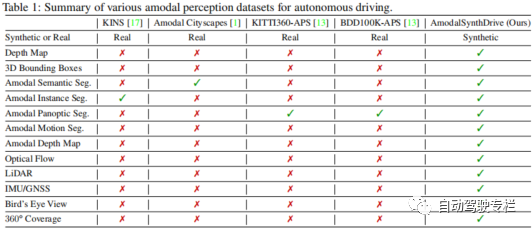
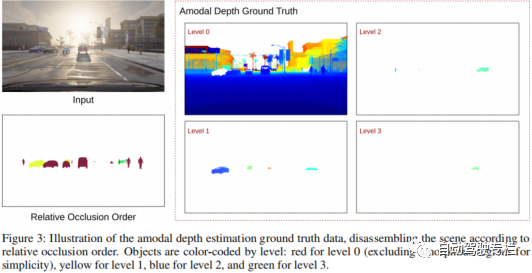
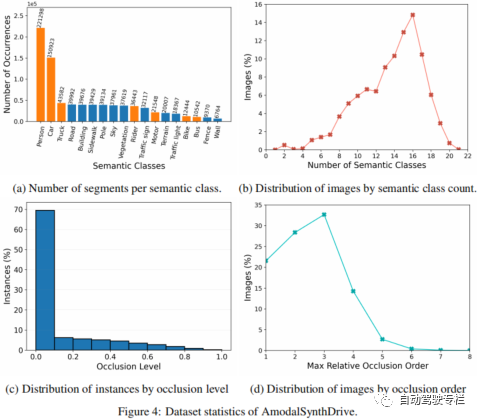
##本文介紹了AmodalSynthDrive:一個用於自動駕駛的合成非模態感知資料集。與人類不同,即使在部分遮蔽的情況下,人類也可以毫不費力地估計物體的整體,而現代電腦視覺演算法仍然發現這一方面極具挑戰性。由於缺乏合適的數據集,利用這種非模態感知進行自動駕駛在很大程度上仍未開發。這些資料集的產生主要受到昂貴標註成本的影響,以及需要減輕標註者在準確標註遮蔽區域的主觀性所帶來的干擾。為了解決這些限制,本文引入了AmodalSynthDrive,這是一個合成的多任務非模態感知資料集。該資料集提供了150個駕駛序列的多視圖相機影像、3D邊界框、雷射雷達資料和里程計,其包括了在各種交通、天氣和光照條件下超過1M的目標標註。 AmodalSynthDrive支援多種非模態場景理解任務,包括引入的非模態深度估計用於增強空間理解。本文為每項任務評估若干基線,以說明挑戰並且設定公開基準伺服器。
主要貢獻本文的貢獻總結如下:
1)本文提出了AmodalSynthDrive資料集,這是一種針對城市駕駛場景的全面合成非模態感知資料集,具有多種資料來源;
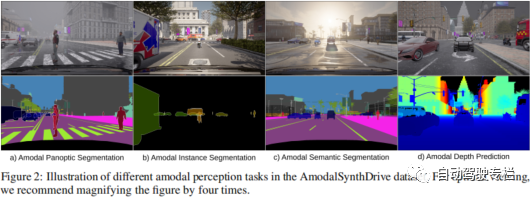
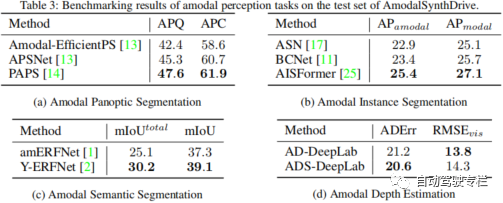
#本文提出了針對非模態感知任務的基準,包括非模態語義分割、非模態實例分割和非模態全景分割
3)新型的非模態深度估計任務旨在促進增強空間理解。本文透過若干基線證明了這項新任務的可行性。
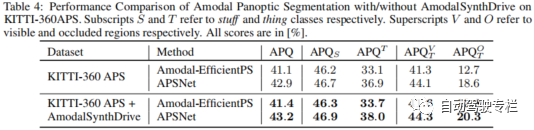
論文圖片與表格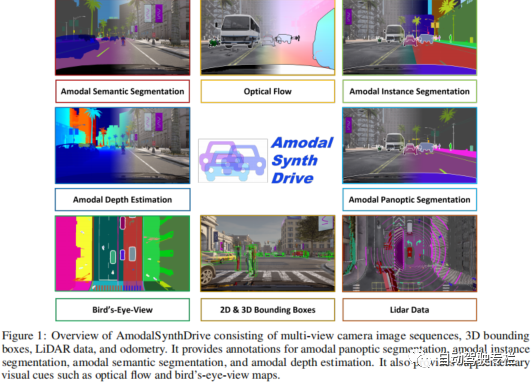
總結
感知是自動駕駛汽車的關鍵任務,但目前的方法仍然缺乏對複雜交通場景解釋所需的非模態理解。因此,本文提出了AmodalSynthDrive,這是一個用於自動駕駛的多模態合成感知資料集。透過合成的圖像和雷射雷達點雲,我們提供了一個全面的數據集,其中包括用於基本非模態感知任務的真值標註數據,並引入了一種新的任務來增強空間理解,稱為非模態深度估計。本文提供了超過60000個單獨的影像集,每個影像集都包含非模態實例分割、非模態語義分割、非模態全景分割、光流、2D和3D邊界框、非模態深度以及鳥瞰圖相關的數據。透過AmodalSynthDrive,本文提供了各種基線,並相信這項工作將為動態城市環境中的非模態場景理解的新型研究鋪平道路

以上是合成非模態感知資料集AmodalSynthDrive:自動駕駛的創新解決方案的詳細內容。更多資訊請關注PHP中文網其他相關文章!