



跑酷是一項極限運動,對機器人特別是四足機器狗來說,更是一項巨大的挑戰,需要在複雜的環境中快速克服各種障礙。一些研究嘗試使用參考動物數據或複雜的獎勵,但這些方法產生的「跑酷」技能要么多樣但盲目,要么基於視覺但特定於場景。然而,自主跑酷需要機器人學習基於視覺且多樣化的通用技能,以感知各種場景並迅速做出反應。
最近,一個機器狗跑酷的影片火了,影片中的機器狗在多種場景中迅速克服了各種障礙。例如,從鐵板下方的縫隙穿過,爬上木箱,再跳到另一個木箱上,一連串動作行雲流水:

##這串動作說明機器狗已經掌握了貼地爬行、攀爬和跳躍三個基本技能



#它還有一個特殊的技能:能夠傾斜擠過狹窄的縫隙

如果機器狗未能克服障礙,它會多試幾次:
#該內容已經被重寫成中文: 這款機器狗是基於一種為低成本機器人研發的「跑酷」技能學習框架。此框架由上海期智研究院、史丹佛大學、上海科技大學、CMU和清華大學的研究者共同提出,其研究論文已入選CoRL 2023(Oral)。本研究計畫已開源
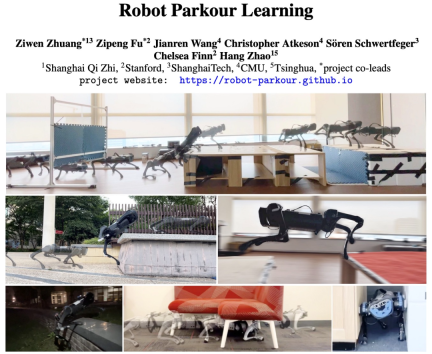
論文網址:https://arxiv.org/abs/2309.05665
#計畫地址:https://github.com/ZiwenZhuang/parkour
#方法簡介
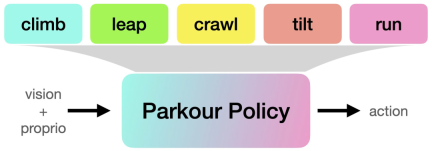
該研究推出了一種新的開源系統,用於學習基於視覺的端到端跑酷策略,以使用簡單的獎勵來學習多種跑酷技能,而無需任何參考運動數據。
具體來說,這項研究提出了一種強化學習方法,旨在讓機器人學會攀爬高障礙、跳過大間隙、在低障礙下爬行、擠過狹小縫隙和跑步等技能,並將這些技能轉化為基於單一視覺的跑酷策略。同時,透過使用以自我為中心的深度相機,將這些技能遷移到四足機器人上
#為了在低成本機器人上成功部署該研究提出的跑酷策略,只需使用機載計算(Nvidia Jetson)、機載深度攝影機(Intel Realsense)和機載電源,而不需要動作捕捉、雷射雷達、多個深度攝影機和大量計算
為了訓練跑酷策略,研究共進行如下三個階段的工作:
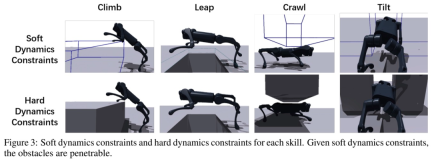
第一階段:強化學習預訓練,具備軟動態限制。研究採用自動課程讓機器人學習穿越障礙物,鼓勵機器人逐漸學會克服障礙
第二階段:具有 hard 動態限制的強化學習微調。研究在這個階段強制執行所有動態約束,並用現實動態(realistic dynamics)微調機器人在預訓練階段學到的行為。
第三階段:蒸餾。在學習了每個單獨的跑酷技能後,該研究使用DAgger 將它們蒸餾成一個基於視覺的跑酷策略(由RNN 參數化),該策略可以僅使用機載感知和計算部署到腿式機器人上。
實驗及結果
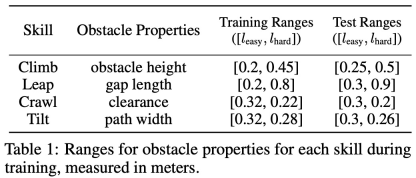
在訓練中,該研究為每種技能設定了相應的障礙物尺寸,如下表1 所示:
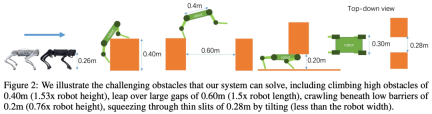
該研究進行了大量的模擬和現實實驗,結果表明,跑酷策略使低成本四足機器人能夠自主選擇和執行適當的跑酷技能,僅使用機載計算、機載視覺感測和機載電源即可穿越開放世界中具有挑戰性的環境,包括爬高0.40m(1.53x 機器人高度)的障礙物,跳過0.60m(1.5x 機器人長度)的大間隙,在0.2m(0.76x 機器人高度)的低障礙物下爬行,透過傾斜擠過0.28m 的細縫(小於機器人寬度),可以一直跑步前進。
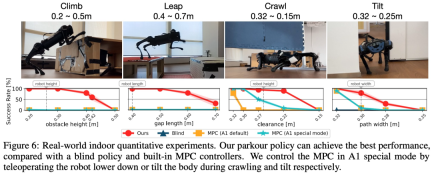
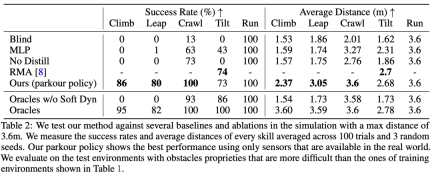
此外,研究也對所提出的方法與幾個基準方法進行了比較,並在模擬環境中進行了消融實驗。具體結果如表2所示:
如有興趣的讀者可閱讀原始論文,以深入了解更多研究內容
#以上是攀爬、跳躍、過窄縫,開源強化學習策略讓機器狗跑酷了的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 讓我們跳舞:結構化運動以微調我們的人類神經網Apr 27, 2025 am 11:09 AM
讓我們跳舞:結構化運動以微調我們的人類神經網Apr 27, 2025 am 11:09 AM科學家已經廣泛研究了人類和更簡單的神經網絡(如秀麗隱桿線蟲中的神經網絡),以了解其功能。 但是,出現了一個關鍵問題:我們如何使自己的神經網絡與新穎的AI一起有效地工作
 新的Google洩漏揭示了雙子AI的訂閱更改Apr 27, 2025 am 11:08 AM
新的Google洩漏揭示了雙子AI的訂閱更改Apr 27, 2025 am 11:08 AMGoogle的雙子座高級:新的訂閱層即將到來 目前,訪問Gemini Advanced需要$ 19.99/月Google One AI高級計劃。 但是,Android Authority報告暗示了即將發生的變化。 最新的Google P中的代碼
 數據分析加速度如何求解AI的隱藏瓶頸Apr 27, 2025 am 11:07 AM
數據分析加速度如何求解AI的隱藏瓶頸Apr 27, 2025 am 11:07 AM儘管圍繞高級AI功能炒作,但企業AI部署中潛伏的巨大挑戰:數據處理瓶頸。首席執行官慶祝AI的進步時,工程師努力應對緩慢的查詢時間,管道超載,一個
 Markitdown MCP可以將任何文檔轉換為Markdowns!Apr 27, 2025 am 09:47 AM
Markitdown MCP可以將任何文檔轉換為Markdowns!Apr 27, 2025 am 09:47 AM處理文檔不再只是在您的AI項目中打開文件,而是將混亂變成清晰度。諸如PDF,PowerPoints和Word之類的文檔以各種形狀和大小淹沒了我們的工作流程。檢索結構化
 如何使用Google ADK進行建築代理? - 分析VidhyaApr 27, 2025 am 09:42 AM
如何使用Google ADK進行建築代理? - 分析VidhyaApr 27, 2025 am 09:42 AM利用Google的代理開發套件(ADK)的力量創建具有現實世界功能的智能代理!該教程通過使用ADK來構建對話代理,並支持Gemini和GPT等各種語言模型。 w
 在LLM上使用SLM進行有效解決問題-Analytics VidhyaApr 27, 2025 am 09:27 AM
在LLM上使用SLM進行有效解決問題-Analytics VidhyaApr 27, 2025 am 09:27 AM摘要: 小型語言模型 (SLM) 專為效率而設計。在資源匱乏、實時性和隱私敏感的環境中,它們比大型語言模型 (LLM) 更勝一籌。 最適合專注型任務,尤其是在領域特異性、控制性和可解釋性比通用知識或創造力更重要的情況下。 SLM 並非 LLMs 的替代品,但在精度、速度和成本效益至關重要時,它們是理想之選。 技術幫助我們用更少的資源取得更多成就。它一直是推動者,而非驅動者。從蒸汽機時代到互聯網泡沫時期,技術的威力在於它幫助我們解決問題的程度。人工智能 (AI) 以及最近的生成式 AI 也不例
 如何將Google Gemini模型用於計算機視覺任務? - 分析VidhyaApr 27, 2025 am 09:26 AM
如何將Google Gemini模型用於計算機視覺任務? - 分析VidhyaApr 27, 2025 am 09:26 AM利用Google雙子座的力量用於計算機視覺:綜合指南 領先的AI聊天機器人Google Gemini擴展了其功能,超越了對話,以涵蓋強大的計算機視覺功能。 本指南詳細說明瞭如何利用
 Gemini 2.0 Flash vs O4-Mini:Google可以比OpenAI更好嗎?Apr 27, 2025 am 09:20 AM
Gemini 2.0 Flash vs O4-Mini:Google可以比OpenAI更好嗎?Apr 27, 2025 am 09:20 AM2025年的AI景觀正在充滿活力,而Google的Gemini 2.0 Flash和Openai的O4-Mini的到來。 這些尖端的車型分開了幾週,具有可比的高級功能和令人印象深刻的基準分數。這個深入的比較


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

記事本++7.3.1
好用且免費的程式碼編輯器

Safe Exam Browser
Safe Exam Browser是一個安全的瀏覽器環境,安全地進行線上考試。該軟體將任何電腦變成一個安全的工作站。它控制對任何實用工具的訪問,並防止學生使用未經授權的資源。

VSCode Windows 64位元 下載
微軟推出的免費、功能強大的一款IDE編輯器

WebStorm Mac版
好用的JavaScript開發工具

PhpStorm Mac 版本
最新(2018.2.1 )專業的PHP整合開發工具

