
哈工大的這款輪腿機器人出3.0版了!揭秘其設計、控制和性能測試

- PHPz轉載
- 2023-09-13 15:41:051097瀏覽
DARPA(美國國防高新科技計畫署)機器人挑戰賽(DRC)每兩年舉辦一次,由美國國防部贊助,比賽希望能甄選出可在福島核電廠這種人類無法接近的危害發生地擔負現場急救任務的機器人。
在2015年的DRC DARPA機器人挑戰賽上,來自韓國的機器人DRC-HUBO靠著一身「絕活」擊敗了其他來自5個國家的22台頂尖機器人獲得總冠軍,其中不乏當時波士頓動力研發的Atlas、日本HRP 這些明星機器人。
DRC-HUBO是一款既能站立又能跪下的機器人
在機器人技術領域,行走的平衡性一直是個難以逾越的鴻溝。這也是最終HUBO獲勝的關鍵——其膝蓋和腳踝處裝置的輪子可以允許機器人由行走模式切換到輪式移動。 研發它的「KAIST」團隊當時還贏得了200萬美元的大獎。
危險環境中的探索和救援是機器人腿式運動的重要應用,用於災害救援或野外探險的機器人往往被要求具有平坦道路上的快速移動能力和復雜地形的適應能力。基於此項難題,來自哈爾濱工業大學機電工程學院機器人與系統國家重點實驗室的團隊研發了一種高機動性、高適應性的液壓動力自主輪腿機器人系統——WLR-3P機器人,這款機器人可以在平坦路面快速且有效率地移動,在崎嶇的地形環境中適應性也是槓槓的。
該研究以論文(Design and Control for WLR-3P: A Hydraulic Wheel-Legged Robot)為題發表於中國科技期刊卓越行動計劃高起點新刊Cyborg and Bionic Systems。
論文地址戳→https://spj.science.org/doi/10.34133/cbsystems.0025
▍揭開WLR-3P機器人的神秘面紗
先來看看WLR-3P長什麼樣子:

作為一種新型無軟管液壓輪腿機器人,WLR-3P能夠透過自主動力進行跳躍和快速移動。
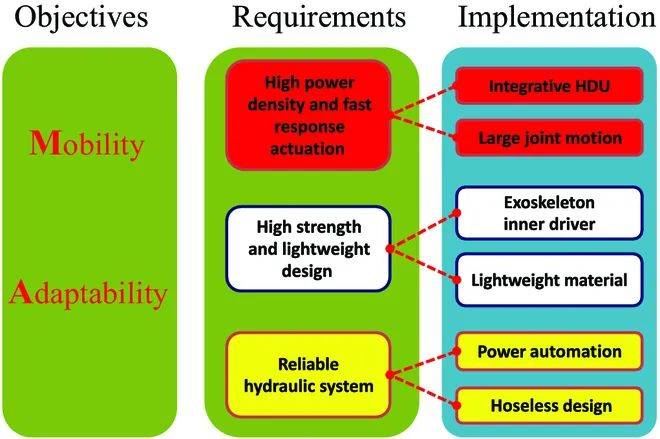
那麼研究人員們是如何提高機器人的機動性和環境適應性呢? 主要靠這三點:(a)高功率密度和快速反應驅動,(b)重量輕、慣性大、強度高,(c)可靠的液壓系統。
WLR-3P的機械設計方法可以進行改寫
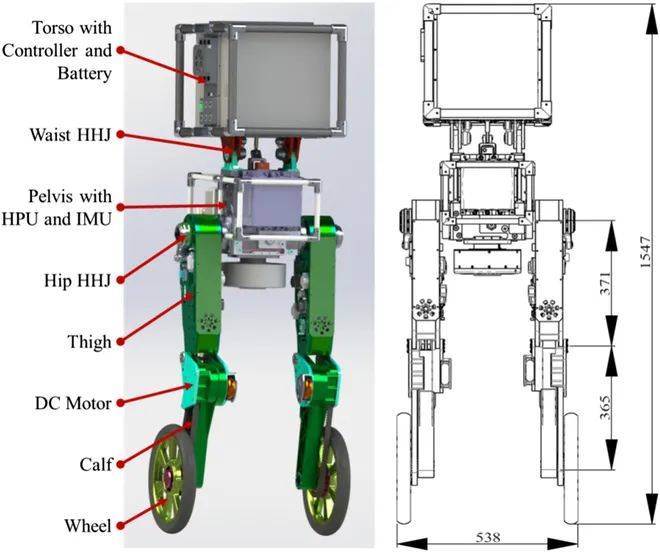
WLR-3P 的組件組成與尺寸
如上圖所示,WLR-3P 有 7 個自由度 (DOF):每條腿 3 個自由度,腰部 1 個自由度。腿部的3個自由度分別在髖關節、膝關節和驅動輪上,其中髖關節和膝關節由HDU驅動,驅動輪由直流馬達驅動。
HDU包括客製化的高頻響應(20Hz)伺服缸、高性能伺服閥、位移感測器和力感測器。 WLR-3P重80公斤,配備機載HPU和電池。最大高度為1.55米,兩個輪子之間的距離約為0.54米。此外,為了安全起見,機器人也「背負」1.8公斤的碳纖維混合鋁合金框架
至於為什麼選擇液壓?簡單粗暴地來說,採用整合式液壓驅動裝置的機器人,功率密度高,驅動反應快。
▍WLR-3P的先進設計與控制策略
研究人員考慮到以下因素:(a)高功率重量比,(b)出色的抗衝擊性,(c)力/位置控制的高頻響應,以及(d) 與人類可比較的生物學特性。
WLR-3P中膝關節液壓驅動單元(HDU)的最大功率密度可達7kW/kg左右,遠高於傳統馬達。 重寫後的內容:WLR-3P中膝關節液壓驅動單元(HDU)的最大功率密度約為7千瓦/公斤,遠超過傳統馬達
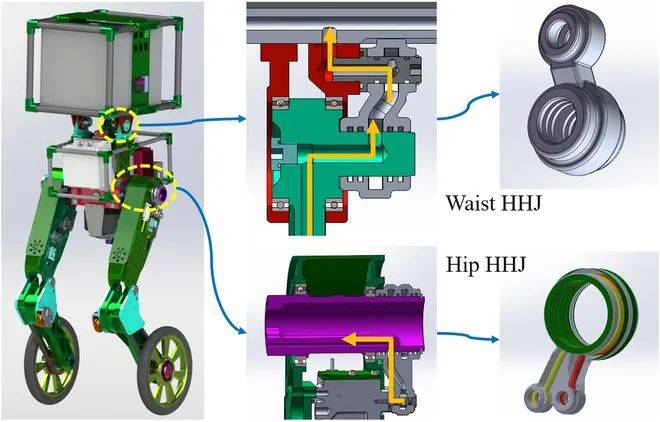
WLR-3P的臀部和腰部HHJ
##液壓動力單元(HPU)的小型化和整合化是液壓機器人研究領域的主要困難,主要是由於泵浦和引擎以及系統加熱的小型化。 由於WLR-3P沒有很大的HPU安裝空間。研發人員們提出了一個創新的設計想法來實現HPU的小型化和整合化。
首先,齒輪幫浦由客製化的外轉子馬達透過微聯軸器驅動。來自幫浦的高壓油經過微型蓄能器和過濾器,提供系統所需的液壓動力。其次,針對系統的發熱問題,設計了集散熱、過濾、穩壓於一體的多功能油箱。最終HPU可輸出最大壓力為21 MPa、流量為20 l/min的液壓動力。
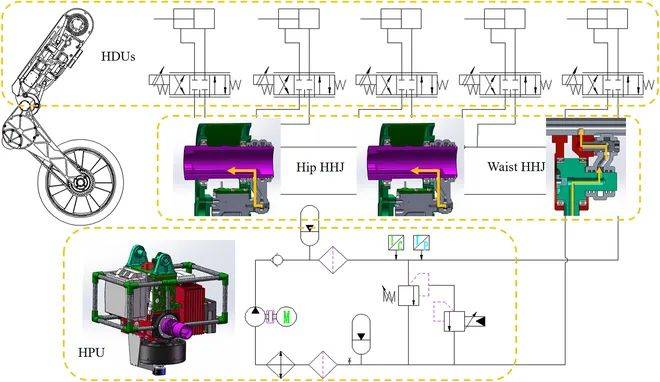
液壓系統的液壓原理圖需要完整
下圖展示了HPU的結構和組成。 HPU的小型化、整合化使機器人擺脫了橡膠軟管的限制,使機器人的運動更加「絲滑」。
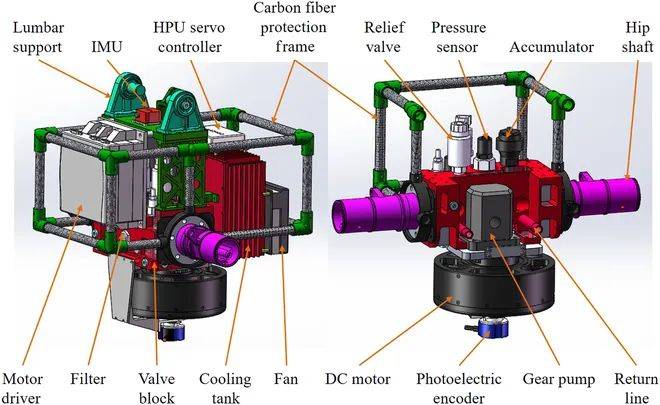
HPU的結構與組成,也是WLR-3P的骨盆
此外,研發團隊也提出了包括分層分散式電氣系統和控制策略的控制系統:
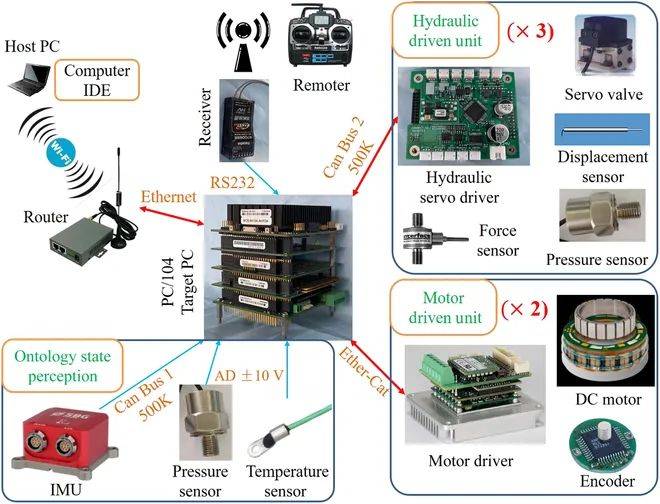
#需要被重寫的內容是:WLR-3P的電子系統
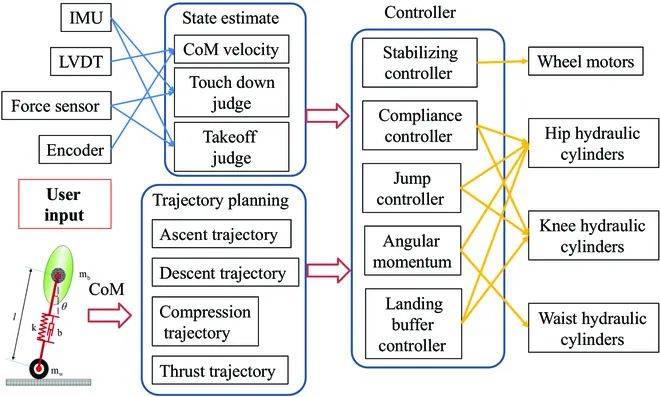
WLR-3P 的控制框架
需要進行重寫的內容是:▍對WLR-3P進行平衡與爆發力測試
研究人員們圍繞著平衡性能和爆發力兩方面展開了測試。 快速移動和下蹲是驗證輪腿機器人平衡性能的最基本動作。當快速移動時,機器人的質心(COM)在水平方向上快速變化,而蹲下時COM在垂直方向上快速變化。
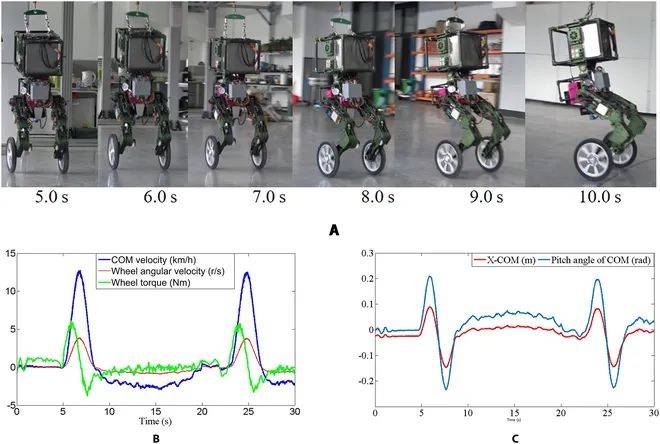
快速移動測試
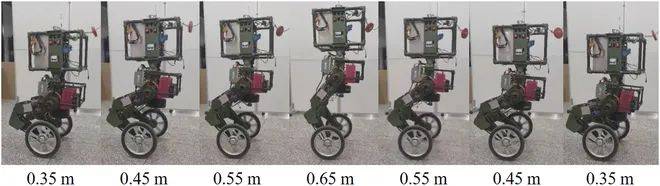
COM在0.35和0.65 m高度範圍內的深蹲快照
#測試顯示,WLR-3P水平和垂直平衡能力OK,也驗證了此機器人硬體系統的可靠性。
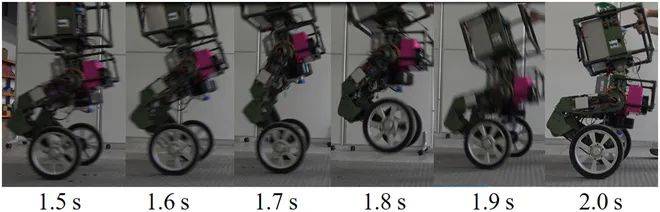
WLR-3P能夠在0.5秒內完成起飛、飛行和降落過程
實驗結果顯示,機器人WLR-3P可以達到13.6 km/h的速度和0.2 m的跳躍高度。液壓驅動和機器人的結構設定得到了充分的認證。

研究人員總結實驗經驗發現,機器人重量越輕、驅動系統爆發能力越強,機器人能跳得越高。特別是腿部重量佔全身重量的比例越小,膝關節的瞬時輸出力和速度就越高,這對機器人的跳躍表現會有更顯著的影響。
需要被改寫的內容是:▍WLR-3P的兩位「哥哥」
#團隊表示,儘管實際性能與理論設計性能之間仍然存在一定的差距,但這也為未來的工作指明了方向
在2017年,團隊已經開發了第一台液壓輪腿機器人WLR-I,並成功驗證了其整合設計和復合運動能力。隨後在2018年,第二代輪腿機器人WLR-II問世,首次實現了無軟管設計,並展現出了出乎意料的地形適應性
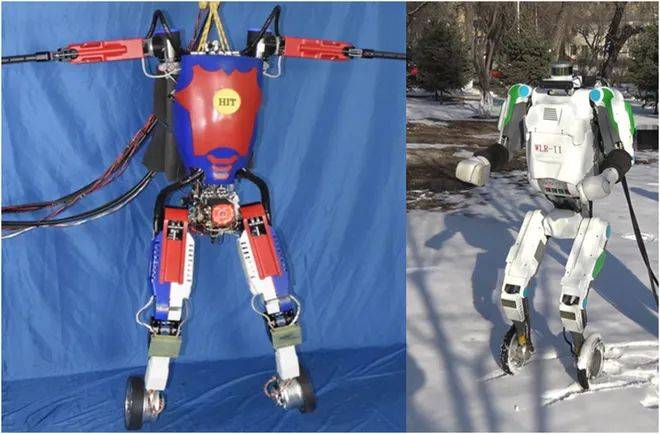
兩個哥哥正在進行關節運動和雪地移動測試
如上圖所示,前兩代機器人其實已經驗證了對複雜地形的適應性和平地上的機動性,但均由外部泵站提供動力。這次WLR-3P在前兩代輪腿機器人的設計基礎上進行了實質改進。不僅提升了運動能力,也實現了動力自主。
接下來,團隊還要考慮如何匹配HPU的輸出功率和HDU所需的功率。對於驅動功率和機器人運動的需求,需要考慮散熱、噪音等工程問題。更重要的是,液壓元件的小型化和客製化也是未來的研究方向之一。
不得不說,效率太高。那就廢話不多說,蹲一個,等WLR四弟吧。
以上是哈工大的這款輪腿機器人出3.0版了!揭秘其設計、控制和性能測試的詳細內容。更多資訊請關注PHP中文網其他相關文章!