



OpenRL 是由第四範式強化學習團隊開發的基於 PyTorch 的強化學習研究框架,支援單智能體、多智能體、自然語言等多種任務的訓練。 OpenRL 是基於 PyTorch 進行開發,目標是為強化學習研究社群提供一個簡單易用、靈活高效、可持續擴展的平台。目前,OpenRL 支援的特性包括:
- 簡單易用且支援單智能體、多智能體訓練的通用介面
- 支援自然語言任務(如對話任務)的強化學習訓練
- 支援從Hugging Face 上匯入模型和資料
- 支援LSTM, GRU,Transformer 等模型
- 支援多種訓練加速,例如:自動混合精度訓練,半精度策略網路收集資料等
- ##支持使用者自訂訓練模型、獎勵模型、訓練資料以及環境
- 支援gymnasium 環境
- 支援字典觀測空間
- #支援wandb,tensorboardX 等主流訓練視覺化工具
- #支援環境的串列和平行訓練,同時確保兩種模式的訓練效果一致
- 中英文文件
- 提供單元測試和程式碼覆蓋測試
- 符合Black Code Style 和型別檢查
目前,OpenRL 已經在GitHub 開源:

##專案位址:https ://github.com/OpenRL-Lab/openrlOpenRL 初步體驗
OpenRL 目前可以透過pip 進行安裝: <code>pip install openrl</code>
<code>conda install -c openrl openrl</code>
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentenv = make ("CartPole-v1", env_num=9) # 创建环境,并设置环境并行数为 9net = Net (env) # 创建神经网络agent = Agent (net) # 初始化智能体agent.train (total_time_steps=20000) # 开始训练,并设置环境运行总步数为 20000</code>
建立環境=> 初始化模型=> 初始化智能體=> 開始訓練!
在一般筆記型電腦上執行上述程式碼,只需要幾秒鐘,便可以完成該智能體的訓練:
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentdef train ():# 创建 MPE 环境,使用异步环境,即每个智能体独立运行env = make ("simple_spread",env_num=100,asynchrnotallow=True,)# 创建 神经网络,使用 GPU 进行训练net = Net (env, device="cuda")agent = Agent (net) # 初始化训练器# 开始训练agent.train (total_time_steps=5000000)# 保存训练完成的智能体agent.save ("./ppo_agent/")if __name__ == "__main__":train ()</code>
當設定參數非常多的時候,OpenRL 也支援使用者寫自己的設定檔來修改訓練參數。例如,使用者可以自行建立以下設定檔(mpe_ppo.yaml),並修改其中的參數:
<code># mpe_ppo.yamlseed: 0 # 设置 seed,保证每次实验结果一致lr: 7e-4 # 设置学习率episode_length: 25 # 设置每个 episode 的长度use_recurrent_policy: true # 设置是否使用 RNNuse_joint_action_loss: true # 设置是否使用 JRPO 算法use_valuenorm: true # 设置是否使用 value normalization</code>
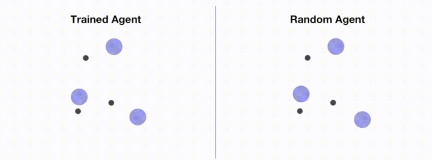
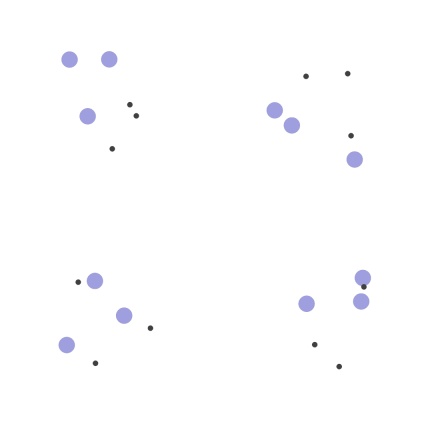
此外,通过 OpenRL,用户还可以方便地使用 wandb 来可视化训练过程: OpenRL 还提供了各种环境可视化的接口,方便用户对并行环境进行可视化。用户可以在创建并行环境的时候设置环境的渲染模式为 "group_human",便可以同时对多个并行环境进行可视化: 此外,用户还可以通过引入 GIFWrapper 来把环境运行过程保存为 gif 动画: OpenRL 提供 agent.save () 和 agent.load () 接口来保存和加载训练好的智能体,并通过 agent.act () 接口来获取测试时的智能体动作: 执行该测试代码,便可以在同级目录下找到保存好的环境运行动画文件 (test_simple_spread.gif):<code>python train_ppo.py --config mpe_ppo.yaml</code>
训练与测试可视化

<code>env = make ("simple_spread", env_num=9, render_mode="group_human")</code>
<code>from openrl.envs.wrappers import GIFWrapperenv = GIFWrapper (env, "test_simple_spread.gif")</code>
智能体的保存和加载
<code># test_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentfrom openrl.envs.wrappers import GIFWrapper # 用于生成 gifdef test ():# 创建 MPE 环境env = make ( "simple_spread", env_num=4)# 使用 GIFWrapper,用于生成 gifenv = GIFWrapper (env, "test_simple_spread.gif")agent = Agent (Net (env)) # 创建 智能体# 保存智能体agent.save ("./ppo_agent/")# 加载智能体agent.load ('./ppo_agent/')# 开始测试obs, _ = env.reset ()while True:# 智能体根据 observation 预测下一个动作action, _ = agent.act (obs)obs, r, done, info = env.step (action)if done.any ():breakenv.close ()if __name__ == "__main__":test ()</code>
训练自然语言对话任务
最近的研究表明,强化学习也可以用于训练语言模型, 并且能显著提升模型的性能。目前,OpenRL 已经支持自然语言对话任务的强化学习训练。OpenRL 通过模块化设计,支持用户加载自己的数据集 ,自定义训练模型,自定义奖励模型,自定义 wandb 信息输出以及一键开启混合精度训练等。
对于对话任务训练,OpenRL 提供了同样简单易用的训练接口:
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentfrom openrl.configs.config import create_config_parserdef train ():# 添加读取配置文件的代码cfg_parser = create_config_parser ()cfg = cfg_parser.parse_args ()# 创建 NLP 环境env = make ("daily_dialog",env_num=2,asynchrnotallow=True,cfg=cfg,)net = Net (env, cfg=cfg, device="cuda")agent = Agent (net)agent.train (total_time_steps=5000000)if __name__ == "__main__":train ()</code>
可以看出,OpenRL 训练对话任务和其他强化学习任务一样,都是通过创建交互环境的方式进行训练。
加载自定义数据集
训练对话任务,需要对话数据集。这里我们可以使用 Hugging Face 上的公开数据集(用户可以替换成自己的数据集)。加载数据集,只需要在配置文件中传入数据集的名称或者路径即可:
<code># nlp_ppo.yamldata_path: daily_dialog # 数据集路径env: # 环境所用到的参数args: {'tokenizer_path': 'gpt2'} # 读取 tokenizer 的路径seed: 0 # 设置 seed,保证每次实验结果一致lr: 1e-6 # 设置 policy 模型的学习率critic_lr: 1e-6 # 设置 critic 模型的学习率episode_length: 20 # 设置每个 episode 的长度use_recurrent_policy: true</code>
上述配置文件中的 data_path 可以设置为 Hugging Face 数据集名称或者本地数据集路径。此外,环境参数中的 tokenizer_path 用于指定加载文字编码器的 Hugging Face 名称或者本地路径。
自定义训练模型
在 OpenRL 中,我们可以使用 Hugging Face 上的模型来进行训练。为了加载 Hugging Face 上的模型,我们首先需要在配置文件 nlp_ppo.yaml 中添加以下内容:
<code># nlp_ppo.yaml# 预训练模型路径model_path: rajkumarrrk/gpt2-fine-tuned-on-daily-dialog use_share_model: true # 策略网络和价值网络是否共享模型ppo_epoch: 5 # ppo 训练迭代次数data_path: daily_dialog # 数据集名称或者路径env: # 环境所用到的参数args: {'tokenizer_path': 'gpt2'} # 读取 tokenizer 的路径lr: 1e-6 # 设置 policy 模型的学习率critic_lr: 1e-6 # 设置 critic 模型的学习率episode_length: 128 # 设置每个 episode 的长度num_mini_batch: 20</code>
然后在 train_ppo.py 中添加以下代码:
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentfrom openrl.configs.config import create_config_parserfrom openrl.modules.networks.policy_value_network_gpt import (PolicyValueNetworkGPT as PolicyValueNetwork,)def train ():# 添加读取配置文件的代码cfg_parser = create_config_parser ()cfg = cfg_parser.parse_args ()# 创建 NLP 环境env = make ("daily_dialog",env_num=2,asynchrnotallow=True,cfg=cfg,)# 创建自定义神经网络model_dict = {"model": PolicyValueNetwork}net = Net (env, cfg=cfg, model_dict=model_dict)# 创建训练智能体agent = Agent (net)agent.train (total_time_steps=5000000)if __name__ == "__main__":train ()</code>
通过以上简单几行的修改,用户便可以使用 Hugging Face 上的预训练模型进行训练。如果用户希望分别自定义策略网络和价值网络,可以写好 CustomPolicyNetwork 以及 CustomValueNetwork 后通过以下方式从外部传入训练网络:
<code>model_dict = {"policy": CustomPolicyNetwork,"critic": CustomValueNetwork,}net = Net (env, model_dict=model_dict)</code>
自定义奖励模型
通常,自然语言任务的数据集中并不包含奖励信息。因此,如果需要使用强化学习来训练自然语言任务,就需要使用额外的奖励模型来生成奖励。在该对话任务中,我们可以使用一个复合的奖励模型,它包含以下三个部分:
●意图奖励:即当智能体生成的语句和期望的意图接近时,智能体便可以获得更高的奖励。
●METEOR 指标奖励:METEOR 是一个用于评估文本生成质量的指标,它可以用来衡量生成的语句和期望的语句的相似程度。我们把这个指标作为奖励反馈给智能体,以达到优化生成的语句的效果。
●KL 散度奖励:该奖励用来限制智能体生成的文本偏离预训练模型的程度,防止出现 reward hacking 的问题。
我们最终的奖励为以上三个奖励的加权和,其中 KL 散度奖励的系数是随着 KL 散度的大小动态变化的。想在 OpenRL 中使用该奖励模型,用户无需修改训练代码,只需要在 nlp_ppo.yaml 文件中添加 reward_class 参数即可:
<code># nlp_ppo.yamlreward_class:id: NLPReward # 奖励模型名称args: {# 用于意图判断的模型的名称或路径"intent_model": rajkumarrrk/roberta-daily-dialog-intent-classifier,# 用于计算 KL 散度的预训练模型的名称或路径"ref_model": roberta-base, # 用于意图判断的 tokenizer 的名称或路径}</code>
OpenRL 支持用户使用自定义的奖励模型。首先,用户需要编写自定义奖励模型 (需要继承 BaseReward 类)。接着,用户需要注册自定义的奖励模型,即在 train_ppo.py 添加以下代码:
<code># train_ppo.pyfrom openrl.rewards.nlp_reward import CustomRewardfrom openrl.rewards import RewardFactoryRewardFactory.register ("CustomReward", CustomReward)</code>
最后,用户只需要在配置文件中填写自定义的奖励模型即可:
<code>reward_class:id: "CustomReward" # 自定义奖励模型名称args: {} # 用户自定义奖励函数可能用到的参数</code>
自定义训练过程信息输出
OpenRL 还支持用户自定义 wandb 和 tensorboard 的输出内容。例如,在该任务的训练过程中,我们还需要输出各种类型奖励的信息和 KL 散度系数的信息, 用户可以在 nlp_ppo.yaml 文件中加入 vec_info_class 参数来实现:
<code># nlp_ppo.yamlvec_info_class:id: "NLPVecInfo" # 调用 NLPVecInfo 类以打印 NLP 任务中奖励函数的信息# 设置 wandb 信息wandb_entity: openrl # 这里用于指定 wandb 团队名称,请把 openrl 替换为你自己的团队名称experiment_name: train_nlp # 这里用于指定实验名称run_dir: ./run_results/ # 这里用于指定实验数据保存的路径log_interval: 1 # 这里用于指定每隔多少个 episode 上传一次 wandb 数据# 自行填写其他参数...</code>
修改完配置文件后,在 train_ppo.py 文件中启用 wandb:
<code># train_ppo.pyagent.train (total_time_steps=100000, use_wandb=True)</code>
然后执行 python train_ppo.py –config nlp_ppo.yaml,稍后,便可以在 wandb 中看到如下的输出:

从上图可以看到,wandb 输出了各种类型奖励的信息和 KL 散度系数的信息。
如果用户还需要输出其他信息,还可以参考 NLPVecInfo 类 和 VecInfo 类来实现自己的 CustomVecInfo 类。然后,需要在 train_ppo.py 中注册自定义的 CustomVecInfo 类:
<code># train_ppo.py # 注册自定义输出信息类 VecInfoFactory.register ("CustomVecInfo", CustomVecInfo)</code>
最后,只需要在 nlp_ppo.yaml 中填写 CustomVecInfo 类即可启用:
<code># nlp_ppo.yamlvec_info_class:id: "CustomVecInfo" # 调用自定义 CustomVecInfo 类以输出自定义信息</code>
使用混合精度训练加速
OpenRL 还提供了一键开启混合精度训练的功能。用户只需要在配置文件中加入以下参数即可:
<code># nlp_ppo.yamluse_amp: true # 开启混合精度训练</code>
对比评测
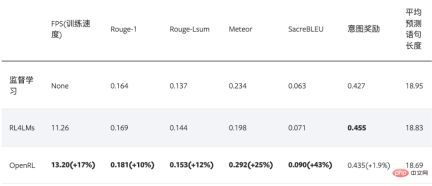
下表格展示了使用 OpenRL 训练该对话任务的结果。结果显示使用强化学习训练后,模型各项指标皆有所提升。另外,从下表可以看出,相较于 RL4LMs , OpenRL 的训练速度更快(在同样 3090 显卡的机器上,速度提升 17% ),最终的性能指标也更好:
最后,对于训练好的智能体,用户可以方便地通过 agent.chat () 接口进行对话:
<code># chat.pyfrom openrl.runners.common import ChatAgent as Agentdef chat ():agent = Agent.load ("./ppo_agent", tokenizer="gpt2",)history = []print ("Welcome to OpenRL!")while True:input_text = input ("> User:")if input_text == "quit":breakelif input_text == "reset":history = []print ("Welcome to OpenRL!")continueresponse = agent.chat (input_text, history)print (f"> OpenRL Agent: {response}")history.append (input_text)history.append (response)if __name__ == "__main__":chat ()</code>
执行 python chat.py ,便可以和训练好的智能体进行对话了:
总结
OpenRL 框架经过了 OpenRL-Lab 的多次迭代并应用于学术研究和 AI 竞赛,目前已经成为了一个较为成熟的强化学习框架。OpenRL-Lab 团队将持续维护和更新 OpenRL,欢迎大家加入我们的开源社区,一起为强化学习的发展做出贡献。更多关于 OpenRL 的信息,可以参考:
- OpenRL 官方仓库:https://github.com/OpenRL-Lab/openrl/
- OpenRL 中文文档:https://openrl-docs.readthedocs.io/zh/latest/
致谢
OpenRL 框架的开发吸取了其他强化学习框架的优点:
- Stable-baselines3: https://github.com/DLR-RM/stable-baselines3
- pytorch-a2c-ppo-acktr-gail: https://github.com/ikostrikov/pytorch-a2c-ppo-acktr-gail
- MAPPO: https://github.com/marlbenchmark/on-policy
- #Gymnasium: https://github.com/Farama-Foundation/Gymnasium
- DI-engine:https://github.com/opendilab/DI -engine/
- Tianshou: https://github.com/thu-ml/tianshou
- RL4LMs: https://github. com/allenai/RL4LMs
未來工作
目前,OpenRL 還處於持續開發與建置階段,未來OpenRL 將會開源更多功能:
- 支持智能體自博弈訓練
- #加入離線強化學習、模範學習、逆增強學習演算法
- 加入更多強化學習環境與演算法
- 整合Deepspeed 等加速框架
- 支援多機分散式訓練
OpenRL Lab 團隊
OpenRL框架是由OpenRL Lab團隊開發,該團隊是第四範式公司旗下的強化學習研究團隊。第四範式長期致力於強化學習的研發與工業應用。為了促進強化學習的產學研一體化,第四範式成立了OpenRL Lab研究團隊,目標是先進技術開源和人工智慧前沿探索。成立不到一年,OpenRL Lab團隊已經在AAMAS發表過三篇論文,參加Google足球遊戲 11 vs 11比賽並獲得第三的成績。團隊提出的TiZero智能體,實現了首個從零開始,透過課程學習、分散式強化學習、自博弈等技術完成Google足球全場遊戲智能體的訓練:

結束2022 年10 月28 日,Tizero 在及第評測平台上排名第一:

以上是訓練提速17%,第四範式開源強化學習研究框架,支援單一、多智能體訓練的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 從摩擦到流:AI如何重塑法律工作May 09, 2025 am 11:29 AM
從摩擦到流:AI如何重塑法律工作May 09, 2025 am 11:29 AM法律技術革命正在獲得動力,促使法律專業人員積極採用AI解決方案。 對於那些旨在保持競爭力的人來說,被動抵抗不再是可行的選擇。 為什麼技術採用至關重要? 法律專業人員
 這就是AI對您的看法,對您的了解May 09, 2025 am 11:24 AM
這就是AI對您的看法,對您的了解May 09, 2025 am 11:24 AM許多人認為與AI的互動是匿名的,與人類交流形成了鮮明的對比。 但是,AI在每次聊天期間都會積極介紹用戶。 每個單詞的每個提示都經過分析和分類。讓我們探索AI Revo的這一關鍵方面
 建立蓬勃發展的AI-Ready企業文化的7個步驟May 09, 2025 am 11:23 AM
建立蓬勃發展的AI-Ready企業文化的7個步驟May 09, 2025 am 11:23 AM成功的人工智能戰略,離不開強大的企業文化支撐。正如彼得·德魯克所言,企業運作依賴於人,人工智能的成功也同樣如此。 對於積極擁抱人工智能的組織而言,構建適應AI的企業文化至關重要,它甚至決定著AI戰略的成敗。 西蒙諾諮詢公司(West Monroe)近期發布了構建蓬勃發展的AI友好型企業文化的實用指南,以下是一些關鍵要點: 1. 明確AI的成功模式: 首先,要對AI如何賦能業務有清晰的願景。理想的AI運作文化,能夠實現人與AI系統之間工作流程的自然融合。 AI擅長某些任務,而人類則擅長創造力、判
 Netflix New Scroll,Meta AI的遊戲規則改變者,Neuralink價值85億美元May 09, 2025 am 11:22 AM
Netflix New Scroll,Meta AI的遊戲規則改變者,Neuralink價值85億美元May 09, 2025 am 11:22 AMMeta升級AI助手應用,可穿戴式AI時代來臨!這款旨在與ChatGPT競爭的應用,提供文本、語音交互、圖像生成和網絡搜索等標準AI功能,但現在首次增加了地理位置功能。這意味著Meta AI在回答你的問題時,知道你的位置和正在查看的內容。它利用你的興趣、位置、個人資料和活動信息,提供最新的情境信息,這在以前是無法實現的。該應用還支持實時翻譯,這徹底改變了Ray-Ban眼鏡上的AI體驗,使其實用性大大提升。 對外國電影徵收關稅是對媒體和文化的赤裸裸的權力行使。如果實施,這將加速向AI和虛擬製作的
 今天採取這些步驟以保護自己免受AI網絡犯罪的侵害May 09, 2025 am 11:19 AM
今天採取這些步驟以保護自己免受AI網絡犯罪的侵害May 09, 2025 am 11:19 AM人工智能正在徹底改變網絡犯罪領域,這迫使我們必須學習新的防禦技巧。網絡罪犯日益利用深度偽造和智能網絡攻擊等強大的人工智能技術進行欺詐和破壞,其規模前所未有。據報導,87%的全球企業在過去一年中都成為人工智能網絡犯罪的目標。 那麼,我們該如何避免成為這波智能犯罪的受害者呢?讓我們探討如何在個人和組織層面識別風險並採取防護措施。 網絡罪犯如何利用人工智能 隨著技術的進步,犯罪分子不斷尋找新的方法來攻擊個人、企業和政府。人工智能的廣泛應用可能是最新的一個方面,但其潛在危害是前所未有的。 特別是,人工智
 共生舞蹈:人工和自然感知的循環May 09, 2025 am 11:13 AM
共生舞蹈:人工和自然感知的循環May 09, 2025 am 11:13 AM最好將人工智能(AI)與人類智力(NI)之間的複雜關係理解為反饋循環。 人類創建AI,對人類活動產生的數據進行培訓,以增強或複制人類能力。 這個AI
 AI最大的秘密 - 創作者不了解,專家分裂May 09, 2025 am 11:09 AM
AI最大的秘密 - 創作者不了解,專家分裂May 09, 2025 am 11:09 AMAnthropic最近的聲明強調了有關尖端AI模型缺乏了解,引發了專家之間的激烈辯論。 這是一個真正的技術危機,還是僅僅是通往更秘密的道路上的臨時障礙
 Sarvam AI的Bulbul-V2:印度最佳TTS模型May 09, 2025 am 10:52 AM
Sarvam AI的Bulbul-V2:印度最佳TTS模型May 09, 2025 am 10:52 AM印度是一個多元化的國家,具有豐富的語言,使整個地區的無縫溝通成為持續的挑戰。但是,Sarvam的Bulbul-V2正在幫助彌合其高級文本到語音(TTS)T


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

SublimeText3 英文版
推薦:為Win版本,支援程式碼提示!

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)

Safe Exam Browser
Safe Exam Browser是一個安全的瀏覽器環境,安全地進行線上考試。該軟體將任何電腦變成一個安全的工作站。它控制對任何實用工具的訪問,並防止學生使用未經授權的資源。

EditPlus 中文破解版
體積小,語法高亮,不支援程式碼提示功能

SublimeText3漢化版
中文版,非常好用

