
Python如何實作arctan換算角度

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2023-04-19 16:04:062348瀏覽
笛卡爾座標系
對於平面座標系,任一射線OP與x軸夾角θ的範圍,可以取[0,2π)或(-&pi ;,π],如無特殊說明,我們統一使用後者。
將笛卡爾空間座標系中的點Pc = ( x , y , z ) 表示成球體座標系中的形式Ps = ( θ , ϕ , r )。
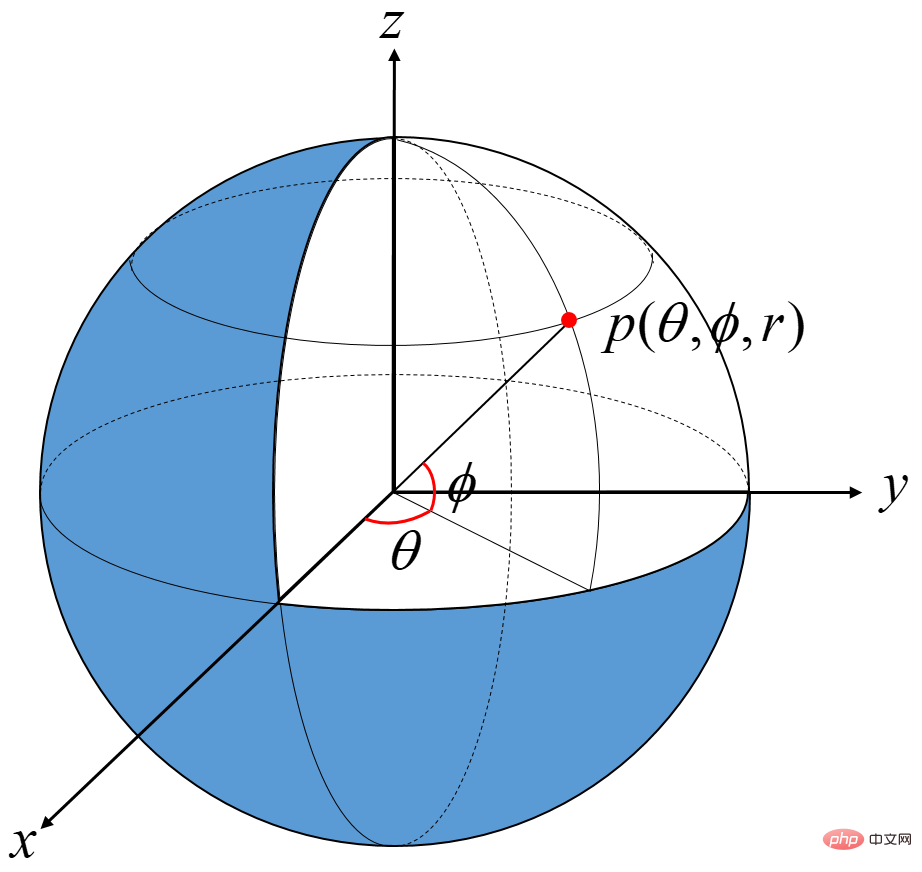
其中
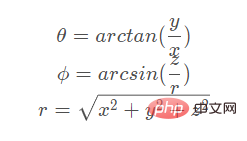
##根據球坐標的定義,要求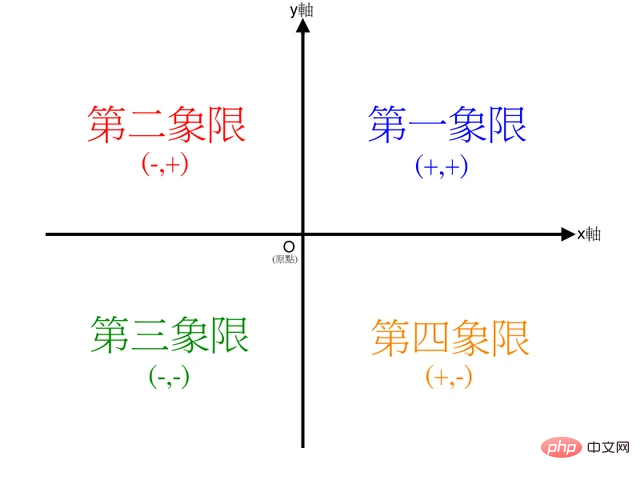 θ∈[−π,π],ϕ∈[−π/2,π/2] ,r∈[0 , ∞)
θ∈[−π,π],ϕ∈[−π/2,π/2] ,r∈[0 , ∞)
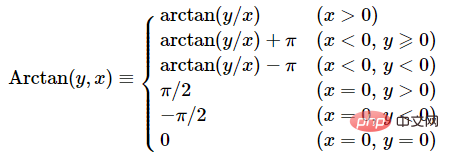
- θ
- ,正切函數的週期是π,因此反正切函數arctan 一般也只取一個週期,其定義域是R,值域是(−π /2 , π/2) 。為了解決這個問題,引入了 Arctan 函數,也就是 arctan2 函數。
import math a = math.atan2(400,-692.820) # 2.6179936760992044 angle = a/math.pi*180 # 149.99998843242386
atan 函數的使用atan(delta_y / delta_x)
<pre class="brush:py;">import math delta_y = 400 delta_x = -692.820 if delta_x == 0: b = math.pi / 2.0 angle = b/math.pi*180 if delta_y == 0: angle = 0.0 elif delta_y < 0: angle -= 180 else: b = math.atan(delta_y/delta_x) angle = b/math.pi*180 if delta_y > 0 and delta_x < 0: angle = angle + 180 if delta_y < 0 and delta_x < 0: angle = angle - 180 b,angle # (-0.5235989774905888, 149.99998843242386)</pre>atan和atan2 的異同參數的個數不同
#兩者傳回值都是弧度如果delta_x等於0,atan2仍然可以計算,但是atan 則需要提前判斷,否則就會導致程式出錯
象限的處理
-
atan2(b,a)是4象限反正切,它的取值不僅取決於正切值b/a,還取決於點(b,a) 落入哪個象限: 當點(b,a) 落入第一象限(b>0, a>0)時,atan2(b,a)的範圍是0 ~ pi /2
當b/a > 0 時,atan(b/a)取值範圍是0 ~ pi/2
以上是Python如何實作arctan換算角度的詳細內容。更多資訊請關注PHP中文網其他相關文章!