
機器人自己做自己,像搭積木一樣輕鬆

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2023-04-17 17:10:091534瀏覽
What,機器人都已經進化到能自己造自己了? !
麻省理工(MIT)的研究人員腦洞大開,於是有了這番情景:
機器人1號忙前忙後,一邊挑選零件,一邊組裝著什麼東西。
不一會兒後,一模一樣的機器人2號就地誕生!
還沒完-機器人2號剛來到這個世界,立刻就能和1號那樣身手敏捷,然後它還給自己「戴上」兩個飾品,喔不,配件。
Emm…看來現在機器人「套娃」真的照進現實了。

MIT的研究者指出:
這種機器人除了能複製自己外,還能分層搭建更大的機器人。
按此思路,以後造大型建築或大型機械設備時,或許可以讓小模組像搭積木似的一步步構造,不用再在旁邊弄個巨型機床之類的了。
這樣能大幅提升建造效率!
相關研究論文登上了Nature子刊Communications Engineering。
主要得益於「智慧」模組
從前文的動圖中不難看出,這種機器人能如此快速地複製自己,主要由於它的一塊塊“零件”,研究者稱之為Voxel。
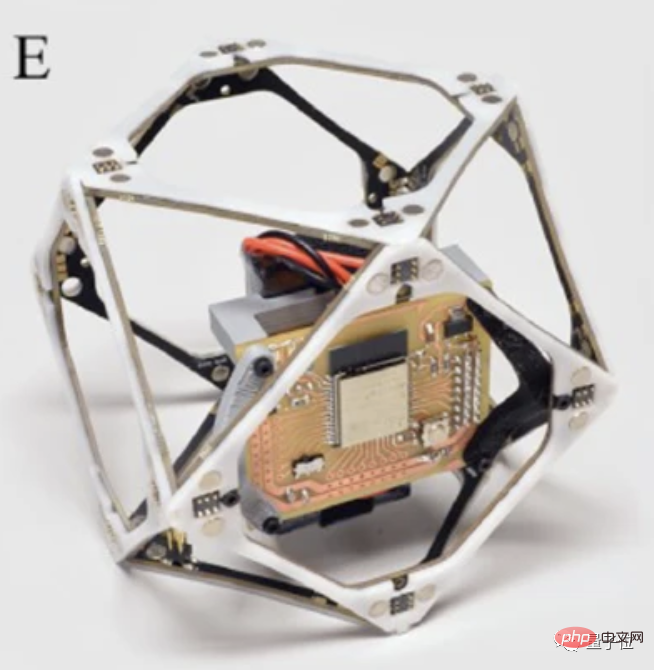
Voxel一詞是體積像素(Volume Pixel)的簡稱,我們可以簡單把它理解為模組。
至於模組為什麼會長成這樣,研究者稱,靈感來自晶格,也就是原子在晶體中規律排列的空間結構。立方八面體的結構具有低密度以及高剛度的優勢,也方便建造和拆卸。
之前的模組基本上都是純機械的,而這些模組除了有機械結構,還有智慧控制系統。
模組中間搭載了電池,還有中央處理器和執行器等,讓其可以靈活地動起來,還能自主導航。
而模組邊緣則有不少電磁鐵,使得相鄰兩個模組可以牢固地連接起來,每組面對面的連接可以在10V電壓下,傳輸8A的電流和50N的拉伸力。
不過僅靠運動還不夠,機器人選取零件和建造新機器人的過程還涉及抓取的動作。
於是研究團隊也為機器人設計了「手腕兒」。

這個「關節」比其他模組更靈活,方便機器人「拿起」零件以及分層搭建。
到這裡,還有個問題:怎麼抓取正確的模組並按順序拼出想要的新結構?
首先,機器人的計算系統會根據給定目標形狀,透過編譯器,將輸入的幾何體自動離散成多個有序的分層構建塊。
然後,系統也會分析出最佳組裝順序,來提高效率並防止「搭積木」過程混亂。
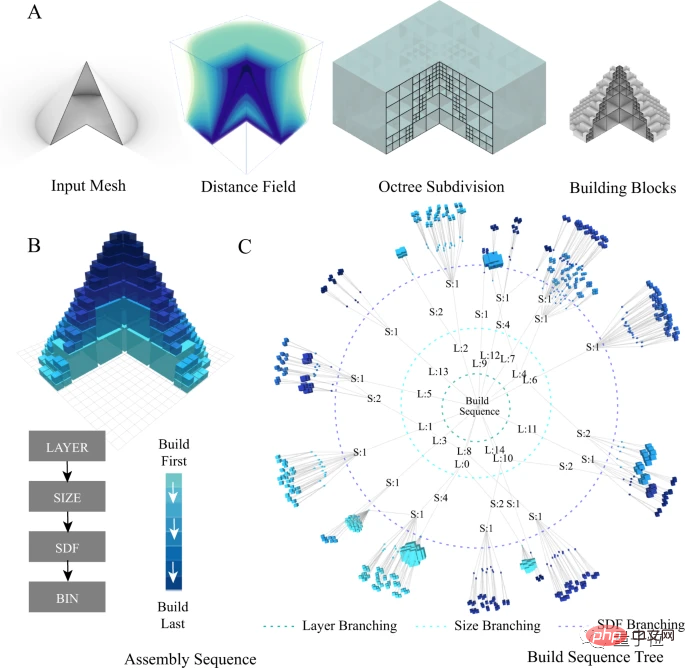
接下來,機器人就可以有條不紊地複製自己了,甚至還能搭建出更大的機器人。
不過,研究者也指出,在實操過程中發現,零件還不夠靈活(開頭動圖是模擬環境下的樣子),目前他們正在研究開發更強大、靈敏的連接器。
研究者簡介
#研究者來自MIT的比特與原子研究中心以及美國陸軍研究實驗室。
論文一作兼通訊作者Amira Abdel-Rahman,現為MIT就讀博士研究生,碩士畢業於哈佛大學技術設計研究專業。

她的主要研究方向是,利用電腦分析製造流程和製造系統。
另外,該系統整體構思的設計者為Neil Gershenfeld教授,現為MIT位元和原子研究中心主任,他也是美國物理學會會員。
目前,MIT位元和原子研究中心,正在致力於打破電腦科學和經典物理學之間界限,探索如何把資料和硬體更好地結合連動。
論文地址:https://www.nature.com/articles/s44172-022-00034-3
參考連結:https://techcrunch.com/2022/11/22 /researchers-are-building-robots-that-can-build-themselves/
以上是機器人自己做自己,像搭積木一樣輕鬆的詳細內容。更多資訊請關注PHP中文網其他相關文章!