
機器學習隨機森林演算法實戰解析

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2023-04-16 22:28:011730瀏覽
譯者| 朱先忠
審校| 孫淑娟
在經典的機器學習中,隨機森林(Random Forests)演算法可謂是一種「銀彈」類型的演算法模型。
該模型之所以很棒,有以下幾個原因:
- 與其他許多演算法相比,需要更少的資料預處理,這使得演算法設定起來更容易
- 可以充當分類或迴歸模型
- 不易過度擬合
- 能夠輕鬆計算出特徵的重要程度
在這篇文章中,我想更好地分析一下組成隨機森林演算法的各個組成部分。為了實現這一點,我將把隨機森林演算法分解為最基本的組成部分,並解釋每一組成部分計算任務的情況。到文章最後,我們就能夠對隨機森林演算法如何運作以及如何以更直觀的方式使用它們有更深入的理解。需要說明的是,本文中我們將使用的範例將側重於分類功能,但其中的許多原則也同樣適用於迴歸場景的應用。
運行隨機森林演算法
讓我們先從呼叫一個經典的隨機森林模式開始。這是最高等級的,也是許多人在使用Python語言訓練隨機森林時所採用的方案。
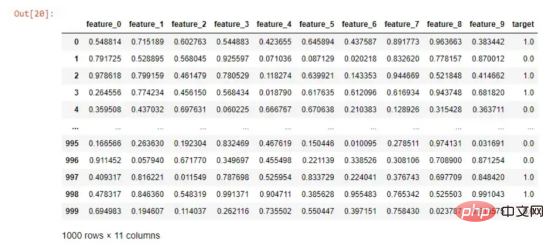
模擬的資料
如果我想運行一個隨機森林演算法來預測我的目標列,那麼我只需要執行以下操作:
from sklearn.ensemble import RandomForestClassifier
from sklearn.model_selection import train_test_split
X_train, X_test, y_train, y_test = train_test_split(df.drop('target', axis=1), df['target'], test_size=0.2, random_state=0)
# 训练随机森林算法并计算得分
simple_rf_model = RandomForestClassifier(n_estimators=100, random_state=0)
simple_rf_model.fit(X_train, y_train)
print(f"accuracy: {simple_rf_model.score(X_test, y_test)}")
# accuracy: 0.93運行隨機森林分類器非常簡單。如上面程式碼所示,我只是定義了n_estimators參數,並將參數random_state設為0。我可以從個人經驗告訴你,很多人都會盯著0.93這個精準度不放鬆。他們似乎感覺非常滿意,於是輕易地開始了瘋狂的部署工作。但是,我們今天不會這麼做。
首先,讓我們重新審視下面這一行「無傷大雅」的程式碼:
simple_rf_model = RandomForestClassifier(n_estimators=100, random_state=0)
隨機狀態是大多數資料科學模型的一個特徵,它可以確保其他人可以複製您的工作。因此,我們不會太擔心random_state這個參數。
但是,讓我們深入研究一下n_estimators這個參數。如果我們查看scikit-learn中的有關文檔,會找到其如下的簡潔定義:
“森林中的樹木數量。”
樹木數量研究
##現在,讓我們更具體地定義一個隨機森林。隨機森林是一個整合模型,是許多決策樹的共識內容。這個定義可能是不完整的,但我們稍後還會回來討論它的。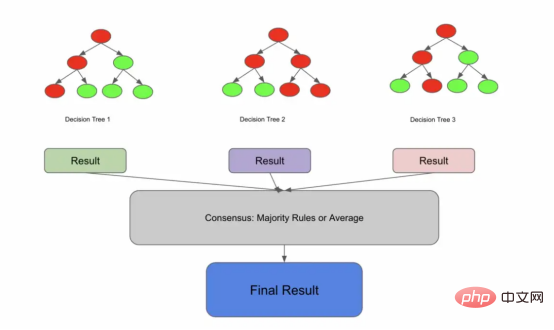
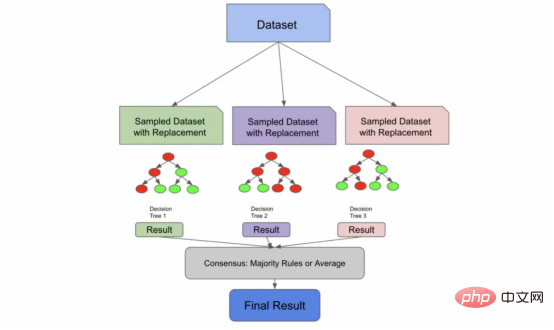
#创建决策树 tree1 = DecisionTreeClassifier().fit(X_train, y_train) tree2 = DecisionTreeClassifier().fit(X_train, y_train) tree3 = DecisionTreeClassifier().fit(X_train, y_train) # 预测X_test上的每一棵决策树 predictions_1 = tree1.predict(X_test) predictions_2 = tree2.predict(X_test) predictions_3 = tree3.predict(X_test) print(predictions_1, predictions_2, predictions_3) # 采取优先级策略 final_prediction = np.array([np.round((predictions_1[i] + predictions_2[i] + predictions_3[i])/3) for i in range(len(predictions_1))]) print(final_prediction)在上面的例子中,我們在X_train上訓練了3棵決策樹,這意味著n_estimators=3。在訓練了3棵樹之後,我們在同一測試集上預測了每棵樹,然後最終得到3棵樹中有2棵選擇的預測。 這是有道理的,但這看起來並不完全正確。如果所有的決策樹都是在相同的資料上訓練的,那麼它們不會得出相同的結論,從而導致否定整體的優勢嗎? 放回抽樣詳解讓我們在前面的定義的基礎上再補充上這樣一句:“隨機森林是一個集成模型,它是許多不相關決策樹的共識。” 決策樹可以透過兩種方式變得不相關:1. 您有足夠大的資料集大小,可以將資料的獨特部分取樣到每個決策樹中。這種方式並不流行,因為通常需要大量數據。 2. 您可以利用一種稱為放回抽樣(sampling with replacement)的技巧。放回抽樣是指從總體中抽取的樣本在抽取下一個樣本之前返回到樣本總體中。 為了解釋放回抽樣,假設我有5個3種顏色的彈珠,所以總體看起來是這樣的:
blue, blue, red, green, red如果我想取樣一些彈珠,我通常會從中抽出幾顆,也許最後會得到:
blue, red這是因為一旦我拿起紅色,我就沒有把它放回原來的彈珠堆中。 然而,如果我用放回方式進行取樣,我實際上可以兩次拾取任何彈珠。因為紅色回到了我的堆中,所以我仍然有機會再次撿起它。
red, red在隨機森林演算法中,預設值是建立約為原始樣本總體大小2/3的樣本。如果我的原始訓練資料是1000行,那麼我輸入到樹中的訓練資料樣本可能大約是670行。也就是說,在建立隨機森林時,嘗試不同的取樣率將是一個很好的參數。 與上一段程式碼不同,下面的程式碼更接近隨機森林,其中參數n_estimators=3。
import numpy as np
import pandas as pd
from sklearn.tree import DecisionTreeClassifier
from sklearn.model_selection import train_test_split
# 对于每一棵树从X_train中采用3次放回抽样
df_sample1 = df.sample(frac=.67, replace=True)
df_sample2 = df.sample(frac=.67, replace=True)
df_sample3 = df.sample(frac=.67, replace=True)
X_train_sample1, X_test_sample1, y_train_sample1, y_test_sample1 = train_test_split(df_sample1.drop('target', axis=1), df_sample1['target'], test_size=0.2)
X_train_sample2, X_test_sample2, y_train_sample2, y_test_sample2 = train_test_split(df_sample2.drop('target', axis=1), df_sample2['target'], test_size=0.2)
X_train_sample3, X_test_sample3, y_train_sample3, y_test_sample3 = train_test_split(df_sample3.drop('target', axis=1), df_sample3['target'], test_size=0.2)
#生成决策树
tree1 = DecisionTreeClassifier().fit(X_train_sample1, y_train_sample1)
tree2 = DecisionTreeClassifier().fit(X_train_sample2, y_train_sample2)
tree3 = DecisionTreeClassifier().fit(X_train_sample3, y_train_sample3)
# 在X_test上预测每一棵决策树
predictions_1 = tree1.predict(X_test)
predictions_2 = tree2.predict(X_test)
predictions_3 = tree3.predict(X_test)
df = pd.DataFrame([predictions_1, predictions_2, predictions_3]).T
df.columns = ["tree1", "tree2", "tree3"]
# 采取优先级策略
final_prediction = np.array([np.round((predictions_1[i] + predictions_2[i] + predictions_3[i])/3) for i in range(len(predictions_1))])
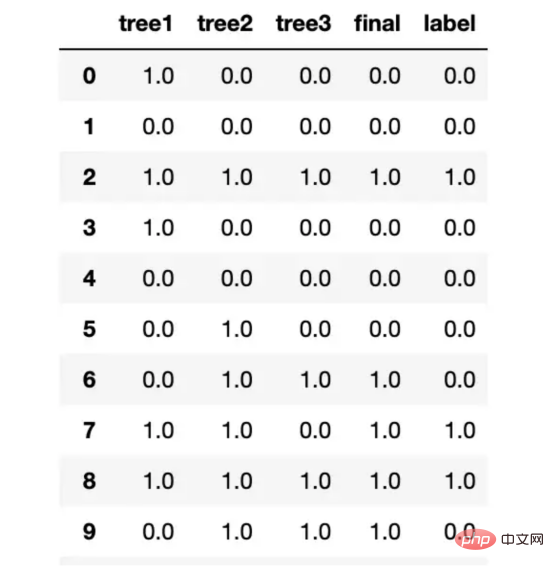
preds = pd.DataFrame([predictions_1, predictions_2, predictions_3, final_prediction, y_test]).T.head(20)
preds.columns = ["tree1", "tree2", "tree3", "final", "label"]
preds
我们用放回抽样,把这些样本输送给树,产生结果,并达成共识。
袋装分类器(Bagging Classifier)
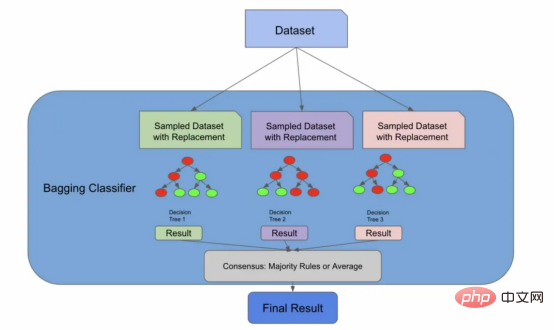
早期的架构实际上就是一个装袋分类器
我们现在将引入一种新的算法,一种称为自助聚集(Bootstrap Aggregation,也称为“Bagging”)的有监督的学习算法。但请放心,这又会与随机森林算法联系起来。我们引入这个新概念的原因是,正如我们将要在文章后面的图中看到的,我们到目前为止所做的一切实际上都是装袋分类器所做的!
在下面的代码中,装袋分类器使用了一个名为bootstrap的参数,它实际上执行了我们刚才手动执行的放回抽样步骤。其实,sklearn库的随机森林算法实现也存在相同的参数。如果bootstrap参数的值是false,那么我们将为每个分类器使用整个总体。
import numpy as np from sklearn.tree import DecisionTreeClassifier from sklearn.ensemble import BaggingClassifier # 集合中所使用的树的数量 n_estimators = 3 # 初始化装袋分类器 bag_clf = BaggingClassifier( DecisionTreeClassifier(), n_estimators=n_estimators, bootstrap=True) # 根据训练数据拟合装袋分类器 bag_clf.fit(X_train, y_train) # 对测试数据进行预测 y_pred = bag_clf.predict(X_test) pd.DataFrame([y_pred, y_test]).T
装袋分类器BaggingClassifier非常棒,因为您可以将它们与未命名为决策树的评估器一起使用!您可以插入许多算法,Bagging算法会将其转化为集成解决方案。随机森林算法实际上扩展了装袋算法(如果bootstrapping = true),因为它部分地利用Bagging算法来形成不相关的决策树。
然而,即使bootstrapping=false,随机森林算法也需要额外一步来确保树之间的不相关性——特征采样。
特征采样详解
特征采样(Feature sampling)意味着不仅对行进行采样,还对列进行采样。与行不同,随机森林的列在没有放回的情况下被采样,这意味着我们不会有重复的列来训练1棵树。
有许多方法可以对特征进行采样。您可以指定要采样的固定最大特征数量,获取特征总数的平方根,或者尝试使用日志数据。这些方法中的每一种都有各自的利弊,并将取决于您的数据和具体使用场景。

通过特征采样扩展了Bagging算法
下面的代码片段使用sqrt技术对列进行采样,对行进行采样,训练3个决策树,并使用优先级规则进行预测。我们首先使用放回进行采样,他们对列进行采样,训练我们的单个树,让我们的树根据测试数据进行预测,然后采用优先级规则实现共识。
import numpy as np
import pandas as pd
import math
from sklearn.tree import DecisionTreeClassifier
from sklearn.model_selection import train_test_split
#对于每一棵树从X_train中取3个样本
df_sample1 = df.sample(frac=.67, replace=True)
df_sample2 = df.sample(frac=.67, replace=True)
df_sample3 = df.sample(frac=.67, replace=True)
# 分割训练集
X_train_sample1, y_train_sample1 = df_sample1.drop('target', axis=1), df_sample1['target']
X_train_sample2, y_train_sample2 = df_sample2.drop('target', axis=1), df_sample2['target']
X_train_sample3, y_train_sample3 = df_sample3.drop('target', axis=1), df_sample3['target']
# 使用sqrt获取训练和测试的采样特征,现在注意replace如何等于False的
num_features = len(X_train.columns)
X_train_sample1 = X_train_sample1.sample(n=int(math.sqrt(num_features)), replace=False, axis = 1)
X_train_sample2 = X_train_sample2.sample(n=int(math.sqrt(num_features)), replace=False, axis = 1)
X_train_sample3 = X_train_sample3.sample(n=int(math.sqrt(num_features)), replace=False, axis = 1)
# 创建决策树,这次我们对列进行采样
tree1 = DecisionTreeClassifier().fit(X_train_sample1, y_train_sample1)
tree2 = DecisionTreeClassifier().fit(X_train_sample2, y_train_sample2)
tree3 = DecisionTreeClassifier().fit(X_train_sample3, y_train_sample3)
# 预测X_test上的每个决策树
predictions_1 = tree1.predict(X_test[X_train_sample1.columns])
predictions_2 = tree2.predict(X_test[X_train_sample2.columns])
predictions_3 = tree3.predict(X_test[X_train_sample3.columns])
preds = pd.DataFrame([predictions_1, predictions_2, predictions_3]).T
preds.columns = ["tree1", "tree2", "tree3"]
# 使用优先级规则
final_prediction = np.array([np.round((predictions_1[i] + predictions_2[i] + predictions_3[i])/3) for i in range(len(predictions_1))])
preds = pd.DataFrame([predictions_1, predictions_2, predictions_3, final_prediction, y_test]).T.head(20)
preds.columns = ["tree1", "tree2", "tree3", "final", "label"]当我运行这段代码时,我发现我的决策树开始预测不同的事情,这表明我们已经删除了树之间的许多相关性。
我的测试结果树之间不再总是彼此保持一致了
决策树基础
到目前为止,我们已经剖析了数据是如何被送入大量决策树的。在前面的代码示例中,我们使用DecisionTreeClassifier函数来训练决策树,但为了完全理解随机森林,我们需要先来解释一下什么是决策树。
一棵名副其实的决策树看起来像一棵倒挂的树。从一种高级别角度上看,该算法试图提出问题,并将数据分割成不同的节点。下图显示了决策树的形象示意。
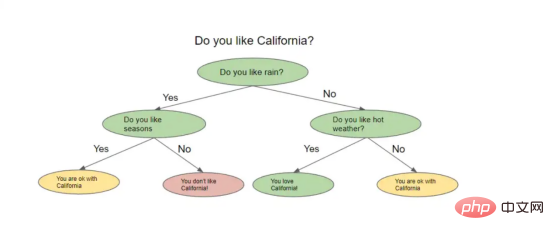
决策树示例
决策树根据前一个问题的答案提出一系列问题。对于它提出的每一个问题,可能都有多个答案,我们不妨可以将其想象为分割节点。上一个问题的答案将决定树将询问的下一个问题。在询问了一系列问题之后的某个时刻,你得到了答案。
但是你怎么知道你的答案是准确的,或者你询问了正确的问题呢?实际上,您可以用几种不同的方法来评估决策树,我们当然也会对这些方法加以解释。
熵与信息增益
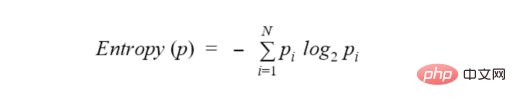
介绍到现在,我们需要讨论一个叫做熵(entropy)的新术语。从一种高角度来看,熵是衡量节点中杂质或随机性水平的一种方法。顺便说一句,还有另一种流行的方法来测量节点的杂质,称为基尼系数(Gini impurity),但我们不会在本文中解析该方法,因为它与许多关于熵的概念重叠,尽管计算略有不同。一般的想法是,熵或基尼系数越高,节点中的方差越大,我们的目标是减少这种不确定性。
决策树试图通过将所询问的节点拆分为更小、更同质的节点来最小化熵。熵的实际公式是:
为了进一步解释熵的概念,让我们回到那个弹珠的例子:
假设我有10个弹珠。其中5个是蓝色的,5个是绿色的。我的总体数据集的熵为1.0,那么计算熵的代码如下:
from collections import Counter from math import log2 #我的预测分类为:0或者1。其中,0代表蓝色弹珠,1代表是绿色弹珠。 data = [0, 0, 0, 1, 1, 1, 1, 0, 1, 0] # 获取标签的长度 len_labels = len(data) def calculate_entropy(data, len_labels): # 对每一种分类进行计数 counts = Counter(labels) # 我们计算分数,这个例子的输出应该是[.5,.5] probs = [count / num_labels for count in counts.values()] # 实际熵计算 return - sum(p * log2(p) for p in probs) calculate_entropy(labels, num_labels)
如果数据完全充满绿色弹珠,熵将为0,并且熵将随着我们接近50%的分割而增加。
每次减少熵,我们都会获得一些关于数据集的信息,因为我们减少了随机性。信息增益告诉我们哪个特征相对来说最能让我们最小化熵。计算信息增益的方法是:
entropy(parent) — [weighted_average_of_entropy(children)]
在这种情况下,父节点是原始节点,子节点是拆分节点的结果。
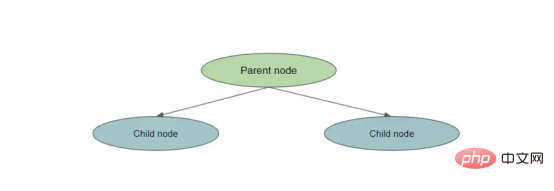
拆分一个节点
为了计算信息增益,我们执行以下操作:
- 计算父节点的熵
- 将父节点拆分为子节点
- 为每个子节点创建权重。这是通过number_of_samples_in_child_node/number_of_ssamples_in_parent_node测量的
- 计算每个子节点的熵
- 通过计算weight*entropy_of_child1+weight*entropy_of_child2创建[weighted_average_of_entropy(children)]
- 从父节点的熵中减去此加权熵
下面的代码实现了将父节点拆分为两个子节点的简单信息增益:
def information_gain(left_labels, right_labels, parent_entropy): """计算拆分的信息增益""" #计算左侧节点的权重 proportion_left_node = float(len(left_labels)) / (len(left_labels) + len(right_labels)) #计算右节点的权重 proportion_right_node = 1 - proportion_left_node # 计算子节点的加权平均值 weighted_average_of_child_nodes = ((proportion_left_node * entropy(left_labels)) + (proportion_right_node * entropy(right_labels))) #返回父节点熵——子节点的加权熵 return parent_entropy - weighted_average_of_child_nodes
决策树详解
考虑到上述这些概念,我们现在已经准备好实现一棵小型决策树了!
在没有任何指导的情况下,决策树将继续拆分节点,直到所有最终的叶节点都是纯的。控制树的复杂性的想法被称为修剪(pruning),我们可以在树完全建成后修剪它,也可以在生长阶段之前使用特定参数对树进行预修剪。预修剪树复杂度的一些方法是控制拆分的数量、限制最大深度(从根节点到叶节点的最长距离)或设置信息增益。
以下代码将所有这些概念联系在一起:
- 从一个数据集开始,其中有一个要预测的目标变量
- 计算原始数据集(根节点)的熵(或基尼系数)
- 查看每个特征并计算信息增益
- 选择具有最佳信息增益的最佳特征,这与导致熵降低最多的特征相同
保持增长,直到满足停止条件——在这种情况下,这是我们的最大深度限制,节点的熵为0。
import pandas as pd
import numpy as np
from math import log2
def entropy(data, target_col):
# calculate the entropy of the entire dataset
values, counts = np.unique(data[target_col], return_counts=True)
entropy = np.sum([-count/len(data) * log2(count/len(data)) for count in counts])
return entropy
def compute_information_gain(data, feature, target_col):
parent_entropy = entropy(data, target_col)
# 计算在给定特征上拆分的信息增益
split_values = np.unique(data[feature])
# initialize at 0
weighted_child_entropy = 0
# 计算加权熵,记住这与新节点中的点数有关
for value in split_values:
sub_data = data[data[feature] == value]
node_weight = len(sub_data)/len(data)
weighted_child_entropy += node_weight * entropy(sub_data, target_col)
#与之前相同的计算,我们只是从父节点熵中减去加权熵
return parent_entropy - weighted_child_entropy
def grow_tree(data, features, target_col, depth=0, max_depth=3):
# 我们将最大深度设置为3以“预修剪”或限制树的复杂性
if depth >= max_depth or len(np.unique(data[target_col])) == 1:
# 如果达到最大深度或所有标签都相同,则停止生长树。所有标签相同意味着熵为0
return np.unique(data[target_col])[0]
# 我们根据信息增益计算最佳特征(或最佳问题)
node = {}
gains = [compute_information_gain(data, feature, target_col) for feature in features]
best_feature = features[np.argmax(gains)]
for value in np.unique(data[best_feature]):
sub_data = data[data[best_feature] == value]
node[value] = grow_tree(sub_data, features, target_col, depth+1, max_depth)
return node
# 模拟一些数据并制作一个数据帧,注意我们是如何建立一个目标的
data = {
'A': [1, 2, 1, 2, 1, 2, 1, 2],
'B': [3, 3, 4, 4, 3, 3, 4, 4],
'C': [5, 5, 5, 5, 6, 6, 6, 6],
'target': [0, 0, 0, 1, 1, 1, 1, 0]
}
df = pd.DataFrame(data)
# 定义我们的特征和标签
features = ["A", "B", "C"]
target_col = "target"
# 成长树
tree = grow_tree(df, features, target_col, max_depth=3)
print(tree)预测这棵树意味着,用新数据遍历生长的树,直到它到达叶节点。最后一个叶节点是预测。
关于随机森林的一些有趣的事情
我们在上一节中讨论的所有内容都是有关单棵决策树如何做出决策。下图将这些概念与我们之前讨论的随机森林采样概念联系起来。
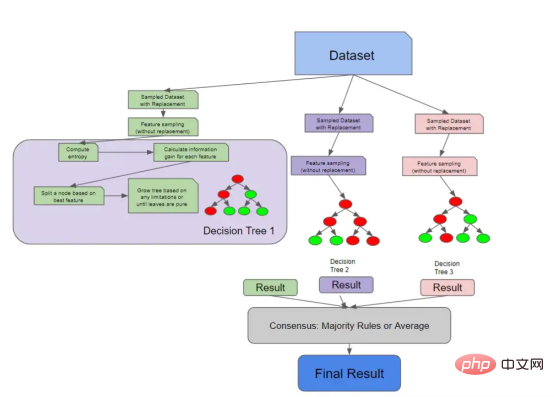
具有解构决策树的随机森林架构
因为决策树实际上检查每个特征的信息增益,所以您可以计算随机森林中的特征重要性。特征重要性的计算通常被视为所有树中杂质的平均减少。随机森林不像Logistic回归模型那样可解释,因此特征重要性为我们提供了一点关于树如何生长的知识。
最后,有几种方法可以测试你训练过的随机森林。您可以始终使用经典的机器学习方法,并使用测试集来衡量模型对未知数据的概括程度。然而,这通常需要第二次计算。随机森林有一个独特的属性,称为袋外错误或OOB错误。还记得我们如何仅对数据集的一部分进行采样以构建每个树吗?
实际上,您可以在训练时使用其余的样本来进行验证,这实际上只有在算法存在集成特性的情况下才是可能的。这意味着,在一次试验中,我们就可以了解我们的模型如何很好地推广到未知数据。
总结
总结一下,我们在本文中所学到的内容:
- 随机森林实际上是一组不相关的决策树,它们做出预测并达成共识。这种共识是回归问题的平均分数和分类问题的优先级规则。
- 随机森林通过利用装袋算法和特征采样减轻相关性。通过利用这两种技术,单棵决策树可以查看我们集合的特定维度,并根据不同的因素进行预测。
- 决策树是通过在产生最高信息增益的特征上分割数据来生长的。信息增益被测量为杂质的最高减少。杂质通常通过熵或基尼系统来测量。
- 随机森林能够通过特征重要性实现有限程度的可解释性,这是特征的平均信息增益的度量。
- 随机森林也有能力在训练时进行交叉验证,这是一种被称为OOB错误的独特技术。这是可能的,得益于算法对上游数据进行采样的方式。
from sklearn.ensemble import RandomForestClassifier
from sklearn.model_selection import train_test_split
X_train, X_test, y_train, y_test = train_test_split(df.drop('target', axis=1), df['target'], test_size=0.2, random_state=0)
# 训练和评分随机森林
simple_rf_model = RandomForestClassifier(n_estimators=100, random_state=0)
simple_rf_model.fit(X_train, y_train)
print(f"accuracy: {simple_rf_model.score(X_test, y_test)}")
# accuracy: 0.93当查看训练随机森林的原始代码时,这几行代码中发生了多少不同的计算和评估,这让我感到惊讶。为了防止过度拟合,在树木和森林层面上进行评估,并实现一些基本的可解释性,需要考虑很多因素,此外,由于现有的所有框架,很容易进行设置。
我希望下次你训练随机森林模型时,你能够查看随机森林的scikit学习文档页面,并更好地了解你的所有选项。虽然有一些直观的默认设置,但应该清楚您可以进行多少不同的调整,以及这些技术中有多少可以扩展到其他模型。
我在写这篇文章时很开心,并且亲自了解了很多关于这个漂亮算法的工作原理。我希望你也能从中学习到一些东西!
译者介绍
朱先忠,51CTO社区编辑,51CTO专家博客、讲师,潍坊一所高校计算机教师,自由编程界老兵一枚。
原文标题:Demystifying the Random Forest,作者:Siddarth Ramesh
以上是機器學習隨機森林演算法實戰解析的詳細內容。更多資訊請關注PHP中文網其他相關文章!