
GitHub開源130+Stars:手把手教你重現基於PPYOLO系列的目標偵測演算法

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB轉載
- 2023-04-09 18:41:101275瀏覽
目標偵測是電腦視覺領域的基礎任務,沒個稱手的Model Zoo怎麼行?
今天給大家安麗一個簡單好用的目標檢測的演算法模型庫miemiedetection,目前在GitHub已斬獲130 顆star
程式碼連結:https ://github.com/miemie2013/miemiedetection
miemiedetection是基於YOLOX進行二次開發的個人檢測庫,也支援PPYOLO、PPYOLOv2、PPYOLOE、FCOS等演算法。
得益於YOLOX的優秀架構,miemiedetection裡的演算法訓練速度都非常快,資料讀取不再是訓練速度的瓶頸。
程式碼開發所使用的深度學習框架為pyTorch,實現了可變形卷積DCNv2、Matrix NMS等高難度算子,支援單機單卡、單機多卡、多機多卡訓練模式(多卡訓練模式建議使用Linux系統),支援Windows、Linux系統。
並且由於miemiedetection是不需要安裝的偵測庫,使用者可以直接變更其程式碼改變執行邏輯,所以在庫中新增演算法也很容易。
作者表示未來還會加入更多的演算法支援(還有女裝)。

演算法如假包換
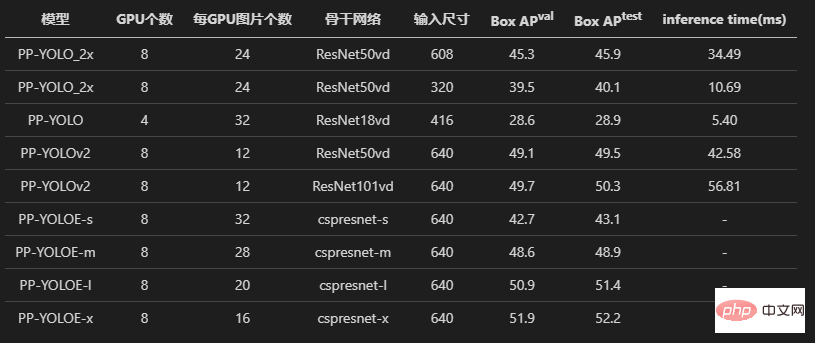
#複現模型,最重要的就是準確率要跟原版的基本相同。
先看PPYOLO、PPYOLOv2、PPYOLOE這三個模型,作者都經過了loss對齊、梯度對齊的實驗。
為了保留證據,在原始碼中還可以看到註解掉的讀寫*.npz 的部分,都是做對齊實驗遺留的代碼。
並且作者也詳細記錄了效能對齊的過程,對於新手來說,照著這條路走一遍,也是一個不錯的學習過程!
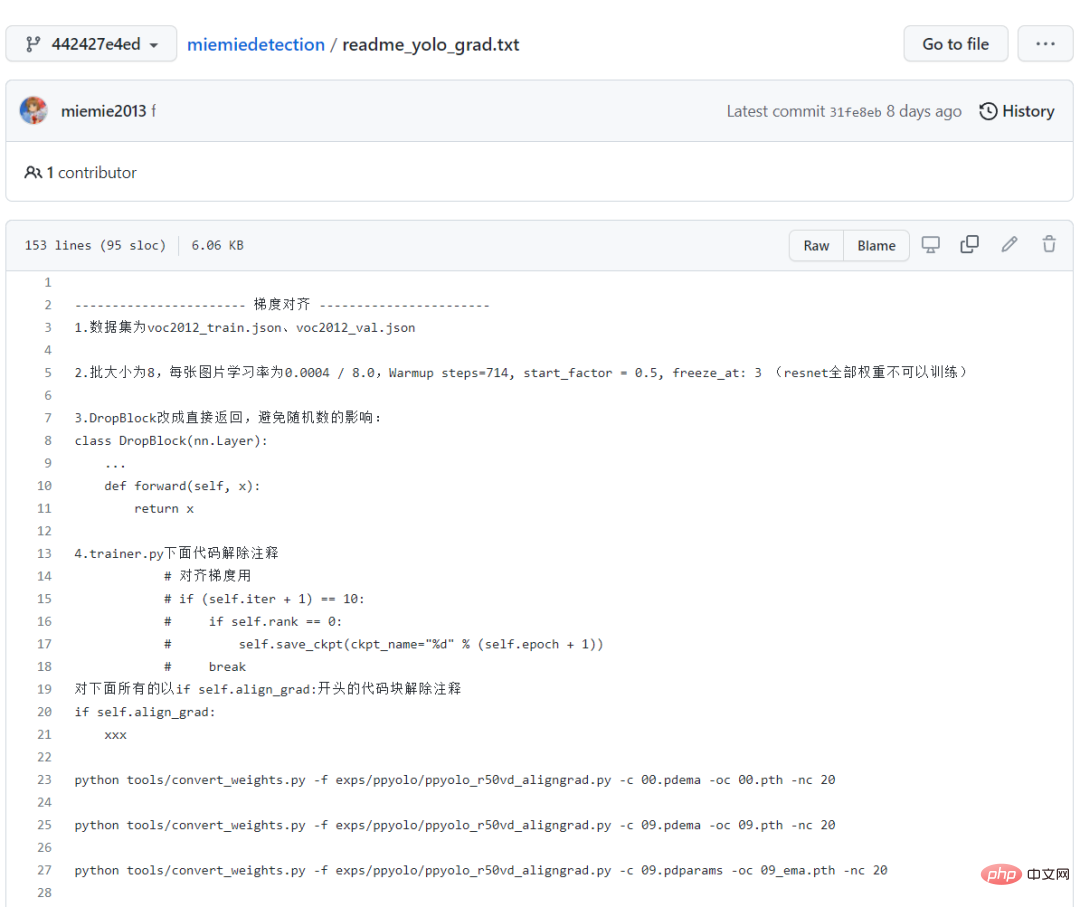
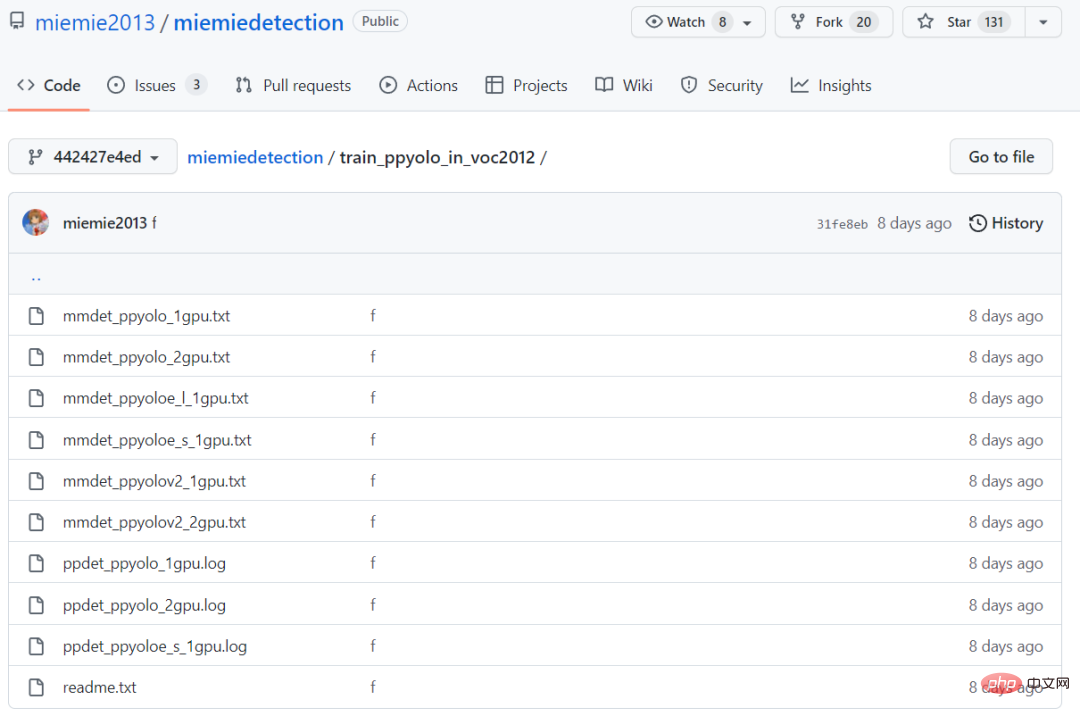
全部的訓練日誌也都記錄保存在倉庫中,足以證明復現PPYOLO系列演算法的正確性!
最後的訓練結果顯示,復現的PPYOLO演算法和原始倉庫具有一樣的損失、一樣的梯度。
另外,作者也試著用原版倉庫和miemiedetection遷移學習voc2012資料集,也獲得了一樣的精確度(使用了相同的超參數)。
和原始實作一樣,使用了同樣的學習率、同樣的學習率衰減策略warm_piecewisedecay(PPYOLO和PPYOLOv2使用)和warm_cosinedecay(PPYOLOE使用)、同樣的指數滑動平均EMA 、同樣的資料預處理方式、同樣的參數L2權重衰減、同樣的損失、同樣的梯度、同樣的預訓練模型,遷移學習得到了同樣的精確度。
實驗做得足,測試做得多,保證大家有美好的使用體驗!
不要998,也不要98,只要點個star,所有目標偵測演算法都免費帶回家!
模型下載與轉換
想跑通模型,參數很重要,作者提供了轉換好的預訓練pth權重文件,可以透過百度網盤直接下載。
連結:https://pan.baidu.com/s/1ehEqnNYKb9Nz0XNeqAcwDw
「提取碼:qe3i
或按照下面的步驟取得:
第一步,下載權重文件,專案根目錄下執行(即下載文件,Windows使用者可以用迅雷或瀏覽器下載wget後面的鏈接,這裡為了展現美觀,只以ppyoloe_crn_l_300e_coco為例):

注意,帶有pretrained字樣的模型是在ImageNet上預訓練的骨幹網路,PPYOLO、PPYOLOv2、PPYOLOE載入這些權重以訓練COCO資料集。其餘為COCO上的預訓練模型。
第二步,轉換權重,在專案根目錄下執行:
#
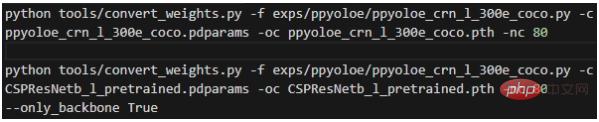
其中各個參數的意義為:
- -f表示的是使用的設定檔;
- -c表示的是讀取的來源權重檔案;
#- -oc表示的是輸出(已儲存)的pytorch權重檔案;
- -nc表示的是資料集的類別數;
#- --only_backbone為True時表示只轉換骨幹網路的權重;
執行完畢後就會在專案根目錄下取得轉換好的*.pth權重檔。
手把手教學
在下面的指令中,大部分都會使用模型的設定文件,所以一開始就有必要先詳細解釋設定檔。
mmdet.exp.base_exp.BaseExp為設定檔基類,是一個抽象類,宣告了一堆抽象方法,如get_model()表示如何取得模型,get_data_loader()表示如何取得訓練的dataloader,get_optimizer()表示如何取得優化器等等。
mmdet.exp.datasets.coco_base.COCOBaseExp是資料集的配置,繼承了BaseExp,它只給出資料集的配置。此倉庫只支援COCO標註格式的資料集的訓練!
其它標註格式的資料集,需要先轉換成COCO標註格式,才能訓練(支援太多標註格式的話,工作量太大)。可以透過miemieLabels將自訂的資料集轉換成COCO的標註格式。所有的偵測演算法配置類別都會繼承COCOBaseExp,表示所有的偵測演算法共用相同的資料集的配置。
COCOBaseExp的設定項目有:
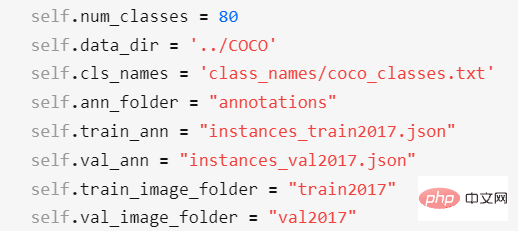
其中,
##- self.num_classes表示的是資料集的類別數;
- self.data_dir表示的是資料集的根目錄;
#- self.cls_names表示的是資料集的類別名稱檔案路徑,是txt文件,一行表示一個類別名稱。如果是自訂資料集,需要新建一個txt檔案並編輯好類別名,再修改self.cls_names指向它;
- self.ann_folder表示的是資料集的註解文件根目錄,需要位於self.data_dir目錄下;
- self.train_ann表示的是資料集的訓練集的註解檔名,需要位於self.ann_folder目錄下;
- self.val_ann表示的是資料集的驗證集的註解檔名,需要位於self.ann_folder目錄下;
##- self. train_image_folder表示的是資料集的訓練集的圖片資料夾名,需要位於self.data_dir目錄下;- self.val_image_folder表示的是資料集的驗證集的圖片檔案夾名,需要位於self.data_dir目錄下;
對於VOC 2012資料集,則需要修改資料集的配置為:
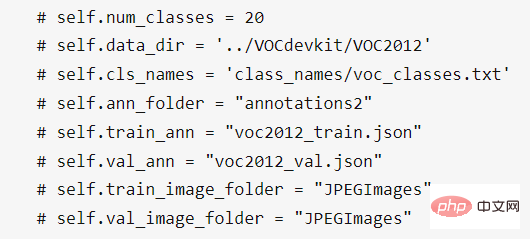
將前面提到的模型下載好後,在VOC2012資料集的self.data_dir目錄下新建一個資料夾annotations2,把voc2012_train.json、voc2012_val.json放進這個文件夾。
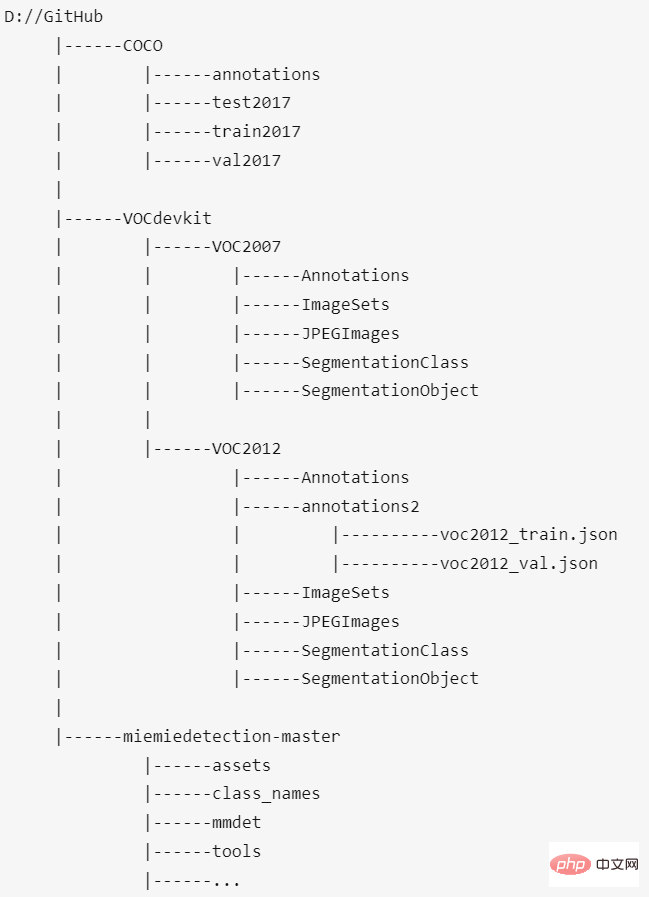
最後,COCO資料集、VOC2012資料集、本專案的放置位置應該是這樣:
mmdet.exp.ppyolo.ppyolo_method_base.PPYOLO_Method_Exp是實作具體演算法所有抽象方法的類,繼承了COCOBaseExp,它實作了所有抽象方法。
exp.ppyolo.ppyolo_r50vd_2x.Exp是PPYOLO演算法的Resnet50Vd模型的最終設定類,繼承了PPYOLO_Method_Exp;
PPYOLOE的設定檔也是類似這樣的結構。
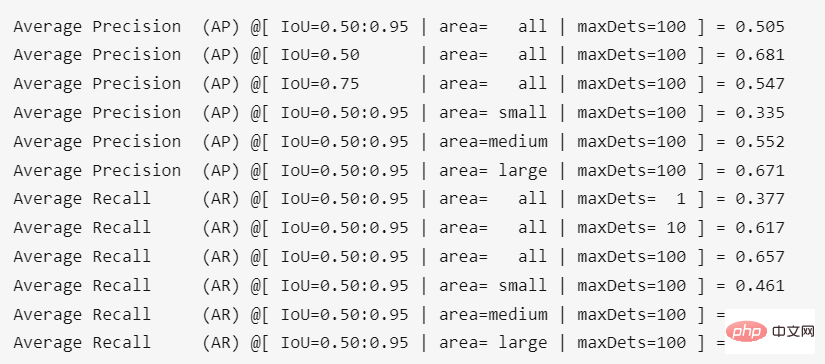
首先,如果輸入的資料為圖片,則在專案根目錄下執行: 其中各個參數的意義為: - -f表示的是使用的設定檔; - -c表示的是讀取的權重檔案; - --path表示的是圖片的路徑; - --conf表示的是分數閾值,只會畫出高於這個閾值的預測框; - --tsize表示的是預測時將圖片Resize成--tsize的分辨率; 預測完成後控制台會列印結果圖片的儲存路徑,使用者可開啟檢視。如果是使用訓練自訂資料集保存的模型進行預測,修改-c為你的模型的路徑即可。 如果預測的是一個資料夾下的所有圖片,則在專案根目錄下執行: 將--path修改為對應圖片資料夾的路徑即可。 如果讀取ImageNet預訓練骨幹網路訓練COCO資料集,則在專案根目錄下執行: #一條指令直接啟動單機八卡訓練,當然了,前提是你真的有一台單機8卡的超算。 其中各個參數的意義為: -f表示的是使用的設定檔; #-d表示的是顯示卡數; -b表示的是訓練時的批次大小(所有卡片的); -eb表示的是評估時的批次大小(所有卡的); -c表示的是讀取的權重檔; --fp16,自動混合精準度訓練; --num_machines,機器數量,建議單機多卡訓練; -- resume表示的是是否是恢復訓練; #建議讀取COCO預訓練權重進行訓練,因為收斂快。 以上述的VOC2012資料集為例,對於ppyolo_r50vd模型,如果是1機1卡,輸入下述指令開始訓練: #如果訓練因為某些原因中斷,想要讀取先前儲存的模型恢復訓練,只要修改-c為想要讀取模型的路徑,再加上--resume參數即可。 如果是2機2卡,即每台機上1張卡,在0號機輸入以下指令: 並在1號機輸入以下指令: #只需要把上面2條指令的192.168.0.107改成0號機的區域網路ip即可。 如果是1機2卡,輸入下面的指令可以開始訓練: 遷移學習VOC2012資料集,實測ppyolo_r50vd_2x的AP(0.50:0.95)可以到達0.59 、AP(0.50)可以到達0.82 、AP(small)可以到達0.18 。不管是單卡還是多卡,都能得到這個結果。 遷移學習時和PaddleDetection獲得了一樣的精確度、一樣的收斂速度,二者的訓練日誌位於train_ppyolo_in_voc2012資料夾下。 如果是ppyoloe_l模型,在單機輸入下面的指令即可開始訓練(凍結了骨幹網路) #遷移學習VOC2012資料集,實測ppyoloe_l的AP(0.50:0.95)可以到達0.66 、AP(0.50)可以到達0.85 、AP(small)可以到達0.28 。 指令和具體的參數如下。 在專案根目錄下執行結果為: 轉換權重後精確度有一點損失,大約為0.4%。 預測


訓練COCO2017資料集

訓練自訂資料集






評估

以上是GitHub開源130+Stars:手把手教你重現基於PPYOLO系列的目標偵測演算法的詳細內容。更多資訊請關注PHP中文網其他相關文章!