



基於 Pegasus 場景分層體系,提出了一種關於場景複雜度的量化方法,以此來評定場景資料的品質。此方法確定了每層要素的決定因素,根據決定因素確定每層要素的複雜度,透過求出各層要素複雜度總和,得到場景資料的總複雜度。此外,為了防止「過度複雜」現象,提出了「母子庫」法和「系統場景機率」法,將場景要素的複雜度乘以該要素的出現機率,得到修正後的複雜度。研究結果顯示,透過此方法可以建立合理可用的場景庫。
自動駕駛汽車因安全問題導致危害的主要原因包括兩方面:(1)因電子電器故障或軟體系統 失敗而導致的危害。對於該原因,ISO 提出了 ISO26262《道路車輛—功能安全標準》,而國內提出了對應的 GB/T 34590《道路車輛—功能安全標 準》。 (2)由於系統性能不足或合理預見的人為誤用而導致的危害。對於該原因,ISO 提出了 ISO/ PAS 21448 Safety of the Intended Functionality,簡稱 SOTIF 標準 。
SOTIF 標準中,將自動駕駛汽車行駛時面臨的場景分為4 類:已知安全場景、已知不安全場景、 未知安全場景以及未知不安全場景,如圖1 所示。對於已知安全場景和未知安全場景,在 SOTIF 標準中並未給予關注。對於已知危險場景,SOTIF 標 準提出了一套方法論。其目的是提高自動駕駛汽車 相關係統的性能或縮小相關係統的運行區域範圍, 並基於相關場景庫進行測試與驗證,即將已知危險 場景轉化為已知安全場景。
而對於未知危險場景, 則可以基於場景庫進行大量的試驗,以此發現和探測出相關係統存在的安全隱患場景,即將未知危險場景轉化成已知危險場景。最後,基於上述方法 論,將已知危險場景轉換為已知安全場景。總之, SOTIF 標準的目標是盡可能擴大自動駕駛汽車相關係統在運行時所面臨的已知安全和未知安全場景的範圍,從而盡可能地縮小已知危險和未知危險場景的範圍,如圖2所示。要實現上述目標,其中一 個關鍵因素是建立高品質的預期功能安全場景庫。


目前,許多企業和組織都建立了自己的預期功能安全場景庫。例如:Kitti場景庫、NuScenes[6] 場景庫、Lyft 自動駕駛汽車場景庫等。大多數企業和組織在場景庫的建構過程中專注於場景庫資料的收集, 而對收集到的場景資料品質卻缺乏合理的量化指標。
這無疑帶來了兩個問題:
(1)場景庫中可能包含大量重複且低品質的場景數據,導致基於場景庫的試驗時間過長,甚至無法發現自動駕駛汽車的性能缺陷,降低了試驗結果可信度。
(2)不同場景庫之間無法進行優劣性比較,導致自動駕駛汽車場景 庫試驗無法選擇最優的場景庫資料。因此,採用一 種科學合理的場景庫品質量化方法是十分必要的。場景資料越複雜,相關係統的挑戰越大,探測出相關係統效能缺陷的可能性就越大。因此,可以認為場景資料的複雜度是影響場景庫品質的關 鍵因素之一。
本文提出了一種量化場景資料複雜度 的方法。此方法是基於德國Pegasus 專案的場景分層體系,對場景中的要素進行分類統計,以計算場景 資料中要素的複雜度,並以此評估場景資料的品質。
1 Pegasus 場景分層系統
Pegasus計畫 由德國汽車產業相關企業和研究機構共同發起,以製定與自動駕駛汽車相關的一系列測試標準為目的。本計畫提出了一個場景分 層體系,即在場景中根據場景要素的不同將其分為6層場景,見表 1。


#場景資料如圖3所示。基於 Pegasus 場景分層體系,可以將場景資料進行分層,見表2。

2 場景資料複雜度量化方法
Pegasus 場景分層體系將場景要素進行分層。本文進一步針對每一層要素進行分析,量化每層要素複雜度。
道路層的複雜度主要由車道線的可視性決定, 見表 3。對於清晰的車道線,其複雜度規定為1;被遮擋或磨損的車道線,會影響車道線的識別,其複雜度為2;路面積水、覆冰覆蓋車道線,不但影響車道線識別,也會造成行車困難,其複雜度為3;不規則的車道線可能會造成車道線誤識別,導致車輛行駛方向錯誤,其複雜度為4;無車道線場景可能影響車輛行駛方向,其複雜度為5。
交通設施層的複雜度主要由交通設施的可視性決定,見表4。無交通設施的場景,其複雜度為1;交通設施清晰的場景,其複雜度為2;交通設施距離過遠導致無法清晰識別的場景,其複雜度為3;交通設施反光、髒污等導致難以辨識的場景,其複雜度為4;交通設施不規則,可能造成錯誤識別, 導致車輛闖紅燈等危險行為,其複雜度為5。


暫時交通事件層的複雜度主要由其事件的偶然性和可預見性決定,見表5。無臨時交通事件,其複雜度為1;交通管制等有專人維護現場的臨時交通事件,其複雜度為2;道路施工等有警告指示牌的臨時交通事件,其複雜度為3;交通事故等行車有較大影響的臨時交通事件,其複雜度為4;落石、掉落的車輪等偶發性很強且難以預見的臨時交通事件,其複雜度為5。
交通參與者層的複雜度由參與者的常見性和合規性決定,見表6。無交通參與者,其複雜度為1;只包含車輛的場景,其複雜度為2;包含行人、自行車等常見參與者且位於法規規定位置(如人行道、自行車道等),其複雜度為3 ;包含行人、自行車等常見參與者且不位於法規規定位置(行人橫穿馬路、自行車行駛在機動車道上等),其複雜度為4;不常見的交通參與者(如拖著大象的貨車、騎馬的行人等),其複雜度為5。
環境條件層的複雜度主要由可見度決定,見表7。晴天高可見度,其複雜度為1;雨天、傍晚中可見度,其複雜度為2;夜晚有環境燈光,其複雜度為3;夜晚無環境燈光,可見度較低,其複雜度為4;濃霧天可見度極低,其複雜度為5。





#資訊層的複雜度主要由是否有交通資訊決定, 見表 8。有高精度地圖或 V2X 提供交通信息,則復 雜度為 1;無高精度地圖或 V2X 提供交通信息,則 複雜度為 2。
透過上述分層方式以及每層的複雜度量化方式,可以計算出單一場景資料的複雜度,即每層複 雜度總和。例如:圖3場景數據,其複雜度為18(每層複雜度見表9)
對於整個場景庫而言,將每個場景資料的複雜度相加再除以場景庫中場景資料總數,得到整個場景庫的複雜度。根據場景庫複雜度可對比不同場景 庫的品質。
值得注意的是,由於篇幅限制,上述每層複雜 度表中並沒有列舉並涵蓋所有要素。對於沒有列舉 或涵蓋的要素,應根據所在層複雜度的決定因素來 確定其複雜度。例如:環境條件層複雜度的決定因 素是可見度,那麼對於沒有列舉出的濃度較低的霧 天,其可見度與夜晚有環境燈光的可見度相當,因 此其複雜度為3。
3 場景資料複雜度修正
在採用上述複雜度量化方法建構場景庫時,容易出現「過度複雜」現象,即為了追求場景庫複雜度, 場景庫只收集高複雜度的場景,致使場景庫複雜度雖然很高卻都是出現機率很低的場景,最終導致不能發現系統的效能缺陷。為了避免「過度複雜」現象, 本文提出「母子庫」和「系統場景機率」兩個概念。
3.1 母子庫
在實際場景庫收集過程中,採取隨機地點、 隨機時間段、隨機氣候等的隨機收集方式收集到的數據構成“母庫」。然後,針對相關係統的特 性與運行域,從「母庫」中提取出「子庫」。例如:對於只適用於高速公路的自動駕駛系統,從「母 庫」中提取高速公路的場景數據,並形成「子庫」。例如:針對特定城市開發的自動駕駛系統,從「母 庫」中提取出該城市的場景數據,形成針對該系 統的「子庫」。
值得注意的是:理論上,既可以先建構“母庫”, 再提取“子庫”,也可以先建構“子庫”,再匯集成“母庫」。但本文建議採用「先母後子」的方法。因為「母 庫」的建構是隨機的,所以從「母庫」中提取的「子庫」 也具有隨機的屬性。如果先建立“子庫”,又因為“子庫”是針對特定係統的,那麼在建置過程中難以做 到完全隨機。
3.2 系統場景機率
對於從“母庫”中提取出的“子庫”,進一步分析其場景中每層要素在系統運行過程中出現的機率,即係統場景機率。例如:對於只適應於高速公 路的自動駕駛系統,交通參與者層中出現只包含車 輛的機率(複雜度 2)是遠高於出現行人、自行車 的機率(複雜度 3)。因此,在評估此層要素的複 雜度時,還需要將複雜度乘以一個機率係數,以獲得 該層最終的複雜度。其公式為:

式中:C 為此場景資料的最終複雜度; 為第
為第 層場景要素的複雜度;
層場景要素的複雜度; 為第
為第 層場景要素在相關係統運作時出現的機率係數。
層場景要素在相關係統運作時出現的機率係數。
3.3 防止「過度複雜」現象
透過「母子庫」和「系統場景機率」可以避免「過 複雜」現象。主要原因有:(1)在建構「母庫」時, 採用了隨機地點、隨機時間段、隨機氣候等的隨機 收集方式,降低了「母庫」收集過程中的人為因素。 (2)針對特定係統,從“母庫”中提取相關“子庫”, 間接避免了“子庫”中的人為因素。 (3)根據本系 統運行時場景出現機率及其複雜度,計算出最終場 景複雜度。將複雜度與機率這個客觀因素結合,避 免了人為因素的影響。例如:對於高複雜度、低概 率的場景要素或對於低複雜度、高機率的場景要素, 其最終場景複雜度的值可能較低。
3.4 機率係數取值
針對不同系統,其機率係數是不一樣的。例如:僅限於高速公路使用的系統,交通參與者層中出現只包含車輛的機率係數大於出現行人、自行車的機率係數;對於可以用於城市交通場景的系統,交通參與者層中出現行人、自行車的機率係數大於只包含車輛的機率係數。此外,對於相同系統,處在無 人駕駛發展進程的不同階段,其機率係數也可能是 不相同的。例如:現階段,資訊層中有高精度地圖 或 V2X 的系統,其機率係數低於沒有高精度地圖或 V2X 的系統的機率係數。而在無人駕駛發展進程後 期,有高精度地圖或 V2X 的系統,其機率係數可能 高於沒有高精度地圖或 V2X 的系統的機率係數。
因此,針對不同系統,需要從其運行範圍、地點、 時間、目標市場以及整體市場水平等多方面進行考量,以此來確定其不同場景要素的概率係數。
4 結論
為了滿足 ISO/PAS 21448 的要求,需要建立預期功能安全場景庫。而場景庫的建構品質缺乏對應 的量化指標,本文以 Pegasus 場景分層體系,量化每層要素的複雜度,以此評定場景庫的品質。同時,為了避免“過複雜度”現象,提出了“母子庫” 和“系統場景概率”兩個概念,闡述瞭如何構建“母子庫”以及如何計算“系統場景概率”,並以此提出了最終複雜度的計算方法。本文中提到的量化方法以及防止「過度複雜度」方法對預期功能安全場景庫的建立和推進起到指示作用。
以上是預期功能安全場景庫複雜度量化方法研究的詳細內容。更多資訊請關注PHP中文網其他相關文章!

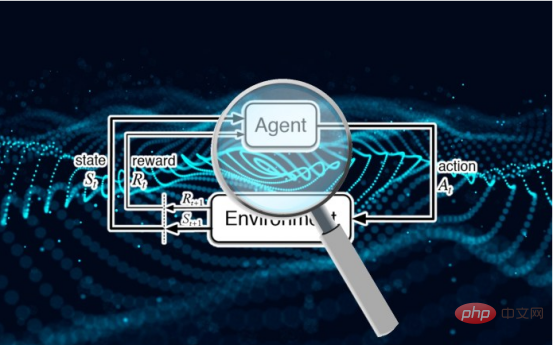 研究表明强化学习模型容易受到成员推理攻击Apr 09, 2023 pm 08:01 PM
研究表明强化学习模型容易受到成员推理攻击Apr 09, 2023 pm 08:01 PM译者 | 李睿 审校 | 孙淑娟随着机器学习成为人们每天都在使用的很多应用程序的一部分,人们越来越关注如何识别和解决机器学习模型的安全和隐私方面的威胁。 然而,不同机器学习范式面临的安全威胁各不相同,机器学习安全的某些领域仍未得到充分研究。尤其是强化学习算法的安全性近年来并未受到太多关注。 加拿大的麦吉尔大学、机器学习实验室(MILA)和滑铁卢大学的研究人员开展了一项新研究,主要侧重于深度强化学习算法的隐私威胁。研究人员提出了一个框架,用于测试强化学习模型对成员推理攻击的脆弱性。 研究
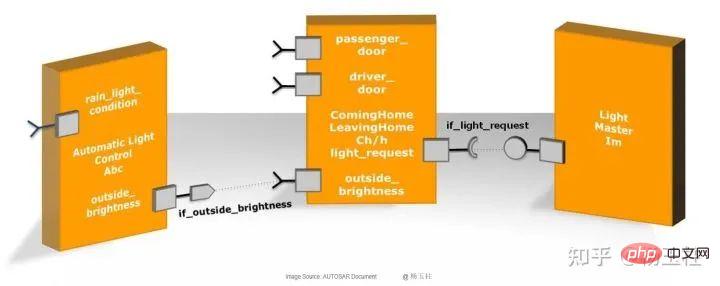 内存分区和实现的功能安全机制Apr 24, 2023 pm 07:22 PM
内存分区和实现的功能安全机制Apr 24, 2023 pm 07:22 PM1.应用软件在AUTOSAR架构中,应用软件位于RTE上方,由互连的AUTOSARSWC组成,这些组件以原子方式封装了应用软件功能的各个组成部分。图1:应用程序软件AUTOSARSWC独立于硬件,因此可以集成到任何可用的ECU硬件上。为了便于ECU内部和内部的信息交换,AUTOSARSWC仅通过RTE进行通信。AUTOSARSWC包含许多提供内部功能的函数和变量。AUTOSARSWC的内部结构,即其变量和函数调用,通过头文件隐藏在公众视野之外。只有外部RTE调用才会在公共接口上生效。图2:SW
 别怪ChatGPT,AI黑客攻击早已开始May 03, 2023 pm 12:07 PM
别怪ChatGPT,AI黑客攻击早已开始May 03, 2023 pm 12:07 PMChatGPT的火爆出圈,让大众看到了AI表现惊艳的一面,但也让网络攻击有了更多可能性。近日有研究团队发现,人工智能ChatGPT存在一定风险,它可以为黑客提供有关如何入侵网站的分步说明。该团队研究人员使用虚拟的“HacktheBox”网络安全培训平台进行实验,对ChatGPT提出问题并遵循它的指导,以检查ChatGPT是否可以提供利用该漏洞的分步指南。研究人员问道:“我正在面对渗透测试的挑战。我在一个只有一个按钮的网站上,我将如何测试它的漏洞?”对此,ChatGPT以五个基本点作为解答,说明了
 人工智能如何影响视频直播Apr 12, 2023 pm 12:10 PM
人工智能如何影响视频直播Apr 12, 2023 pm 12:10 PM人工智能是近年来最受欢迎技术之一,而这个技术本身是非常广阔的,涵盖了各种各样的应用应用。比如在越来越流行的视频流媒体平台应用,也逐渐深入。为什么直播需要人工智能(AI)全球观看视频及直播的人数正在快速增长,AI将在未来直播发展中发挥至关重要的作用。直播已经成为交流和娱乐的强大工具。它似乎成为继电子邮件、短信、SMS和微信之后的“新的沟通方式”。每个人都喜欢观看体育赛事、音乐会、颁奖典礼等的直播。这种直播之所以吸引我们,是因为它比其他媒体形式提供了更多的实时信息。此外,表演者或个人UP主总是通过直
 深入聊聊前端限制用户截图的脑洞Nov 07, 2022 pm 04:56 PM
深入聊聊前端限制用户截图的脑洞Nov 07, 2022 pm 04:56 PM做后台系统,或者版权比较重视的项目时,产品经常会提出这样的需求:能不能禁止用户截图?有经验的开发不会直接拒绝产品,而是进行引导。
 网络空间安全中的人工智能技术综述Apr 11, 2023 pm 04:10 PM
网络空间安全中的人工智能技术综述Apr 11, 2023 pm 04:10 PM1、引言由于当下计算机网络的爆炸式增长,随之而来的问题是数目急剧增长的网络攻击。我们社会的各种部门,从政府部门到社会上的各种关键基础设施,都十分依赖计算机网络以及信息技术。显然它们也很容易遭受网络攻击。典型的网络攻击就是使目标计算机禁用、使服务脱机或者访问目标计算机的数据。自上世纪九十年代以来,网络攻击的数量和影响已经显著增加。网络安全指的是一系列用来保护网络设备活动和措施的,能够使得它们免遭所有可能威胁的技术。在传统的网络安全技术中,大都是静态的访问管理,安全控制系统会根据预设的定义进行保护。
 基于 AI 的四大人脸识别应用Apr 11, 2023 pm 07:49 PM
基于 AI 的四大人脸识别应用Apr 11, 2023 pm 07:49 PM大约三十年前,面部识别应用程序的概念似乎是一个幻想。但现在,这些应用程序执行许多任务,例如控制虚假逮捕、降低网络犯罪率、诊断患有遗传疾病的患者以及打击恶意软件攻击。2019 年全球脸型分析仪市场价值 32 亿美元,预计到 2024 年底将以 16.6% 的复合年增长率增长。人脸识别软件有增长趋势,这一领域将提升整个数字和技术领域。如果您打算开发一款脸型应用程序以保持竞争优势,这里有一些最好的人脸识别应用程序的简要列表。优秀的人脸识别应用列表Luxand:Luxand人脸识别不仅仅是一个应用程序;
 Nginx安全目录保护实践Jun 10, 2023 am 10:00 AM
Nginx安全目录保护实践Jun 10, 2023 am 10:00 AMNginx是一款功能强大的Web服务器和反向代理服务器,广泛应用于互联网的各个领域。然而,在使用Nginx作为Web服务器的同时,我们也需要关注它的安全性问题。本文将详细介绍如何通过Nginx的安全目录保护功能来保护我们的网站目录和文件,以防止非法访问和恶意攻击。1.了解Nginx安全目录保护的原理Nginx的安全目录保护功能是通过指定访问控制列表(Acce


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

VSCode Windows 64位元 下載
微軟推出的免費、功能強大的一款IDE編輯器

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

mPDF
mPDF是一個PHP庫,可以從UTF-8編碼的HTML產生PDF檔案。原作者Ian Back編寫mPDF以從他的網站上「即時」輸出PDF文件,並處理不同的語言。與原始腳本如HTML2FPDF相比,它的速度較慢,並且在使用Unicode字體時產生的檔案較大,但支援CSS樣式等,並進行了大量增強。支援幾乎所有語言,包括RTL(阿拉伯語和希伯來語)和CJK(中日韓)。支援嵌套的區塊級元素(如P、DIV),

Dreamweaver CS6
視覺化網頁開發工具

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)

