



譯者| 李睿
審校| 孫淑娟
在開發機器人時,系統整合往往佔用了大部分的專案資源,這比開發最終應用程式還要重要。隨著低階工業協作機器人的出現,出現了只專注於開發在現有硬體上運行的軟體開發商。然而,機器人的硬體和軟體能力之間存在著至關重要的關係。需要保留對運算硬體的設計控制,以創建更專業、更節能、安全和高效能的機器人。

硬體挑戰與軟體技能
#如果機器人專家希望交付未來需要的更好、更快的機器人,就必須克服硬體面臨的障礙。在後摩爾時代的運算世界中,升級硬體以採用最新一代微處理器無法實現所需的應用程式效能升級。其前進的道路不再在於等待最新的晶片。硬體加速通常是獲得必要收益的唯一途徑。
這種硬體挑戰使機器人等學科的開發人員的工作變得更加複雜,他們的技能往往偏向於開發軟體。這意味著如果他們要滿足市場對新型工業機器人的需求,就必須面對設計自適應運算硬體的前景。在生產線和倉庫等領域使用機器人來提高生產力的企業,正在尋找能夠提供額外靈活性、更精細的位置控制、卓越的基於視覺的能力、改進的資料擷取和更低功耗的設備。
機器人硬體加速的主要原理是,與傳統的控制驅動方法不同,用於軟體開發的混合控制和資料驅動方法允許團隊設計自訂運算架構,為應用程式分配最佳數量的硬體資源。
就實作而言,需要異質計算模型。這利用了CPU和GPU的優勢,它們在控制流程運算方面表現出色,同時利用FPGA的優勢來處理資料流運算。這種方法同時提供了對CPU/GPU的靈活性和完全控制,以實現複雜的運算,具有低功耗、高效能、低延遲和硬體加速的確定性。現在,各種供應商都在提供自適應系統單晶片(SoC)和系統級模組(SOM)設備,例如AMD-Xilinx Kria™SOM及其相關的Kria機器人堆疊,它們提供了這種混合計算模型的優勢.表格比較了這些不同的模型。

自適應系統單晶片(SoC)和系統級模組(SOM)讓機器人專家透過對創建正確資料路徑和控制機制的架構進行程式設計來建構機器行為。然而,需要複雜的工程技能來使用既定的工具和技術對此類架構進行程式設計。
機器人專家缺乏合適的硬體和嵌入式設計專業知識,他們習慣以計算圖的形式建構行為,以解決當前的機器人任務。他們經常使用C 透過高級軟體工程實踐來創建複雜的即時確定性系統。
建立在機器人作業系統(ROS)之上
#現在需要一種不同的方法來幫助機器人專家利用可用的硬體加速技術。在理想情況下,這種方法應該讓他們在熟悉的開發環境(例如ROS)中創建自訂硬件,並使用熟悉的工具(例如Gazebo)進行模擬。
ROS是機器人應用程式開發的事實上的業界標準,自從2020年ROS2問世以來更是如此。這已成為跨行業機器人應用程式的預設軟體開發工具包(SDK),許多團體現在都在使用ROS和Gazebo。
先前將自適應運算整合到ROS中的措施已經從硬體工程師的角度解決了這個挑戰。他們假設使用者以前有嵌入式和硬體流程的經驗,因此熟悉RTL、HDL和HLS等概念以及用於操作它們的設計工具。同樣,部署到嵌入式目標需要對Yocto、OpenEmbedded和相關工具有一定的了解。
了解大多數機器人專家並非來自這一背景,ROS2硬體加速工作小組(HAWG)正在採用以ROS為中心的方法,將嵌入式流程直接整合到ROS生態系統中。它的目標是提供類似於機器人專家在桌面工作站中建立ROS工作區時所享受的體驗。
HAWG的工作建立在已發表的關於最佳化ROS計算圖以利用自適應計算的研究,以及在可程式邏輯中加速部分圖的工具和方法的建議之上。除此之外,HAWG現在正在提出一種架構(如下圖所示),該架構專注於C 和OpenCL等熟悉的語言。

ROS 2和HAWG堆疊一起促進了硬體加速
所提出的架構與平台無關,因此適用於邊緣設施、工作站、資料中心或雲端運算平台,而且與技術無關,以允許針對FPGA、CPU和GPU以及易於移植到各種模組和主機板。
最終,這項工作應該讓大多數機器人專家能夠利用硬體加速的機會來實現下一代先進且複雜的機器人。
原文標題:#Simplifying hardware acceleration for robots with ROS 2##Simplifying hardware acceleration for robots with ROS 2#,作者:Ben Dickson
###以上是如何使用ROS 2簡化機器人的硬體加速的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 AI太空公司誕生了May 12, 2025 am 11:07 AM
AI太空公司誕生了May 12, 2025 am 11:07 AM本文展示了AI如何以Tomorrow.io為典型的例子來徹底改變空間行業。 與像SpaceX這樣的建立太空公司不同,SpaceX並非沒有AI的核心,明天是AI本地公司。 讓我們探索
 印度的10個機器學習實習(2025)May 12, 2025 am 10:47 AM
印度的10個機器學習實習(2025)May 12, 2025 am 10:47 AM在印度(2025)登陸您夢想中的機器學習實習! 對於學生和早期職業專業人員來說,機器學習實習是一個有意義的職業的完美髮射台。 跨不同部門的印度公司 - 尖端的基因
 嘗試Fellou AI並向Google和Chatgpt說再見May 12, 2025 am 10:26 AM
嘗試Fellou AI並向Google和Chatgpt說再見May 12, 2025 am 10:26 AM在過去的一年中,在線瀏覽的景觀經歷了重大轉變。 這種轉變始於增強,個性化的搜索結果,例如困惑和副駕駛等平台,並隨著Chatgpt的整合而加速了
 個人黑客將是一隻非常兇猛的熊May 11, 2025 am 11:09 AM
個人黑客將是一隻非常兇猛的熊May 11, 2025 am 11:09 AM網絡攻擊正在發展。 通用網絡釣魚電子郵件的日子已經一去不復返了。 網絡犯罪的未來是超個性化的,利用了容易獲得的在線數據和AI來製作高度針對性的攻擊。 想像一個知道您的工作的騙子
 教皇獅子座XIV揭示了AI如何影響他的名字選擇May 11, 2025 am 11:07 AM
教皇獅子座XIV揭示了AI如何影響他的名字選擇May 11, 2025 am 11:07 AM新當選的教皇獅子座(Leo Xiv)在對紅衣主教學院的就職演講中,討論了他的同名人物教皇里奧XIII的影響,他的教皇(1878-1903)與汽車和汽車和汽車公司的黎明相吻合
 Fastapi -MCP初學者和專家教程-Analytics VidhyaMay 11, 2025 am 10:56 AM
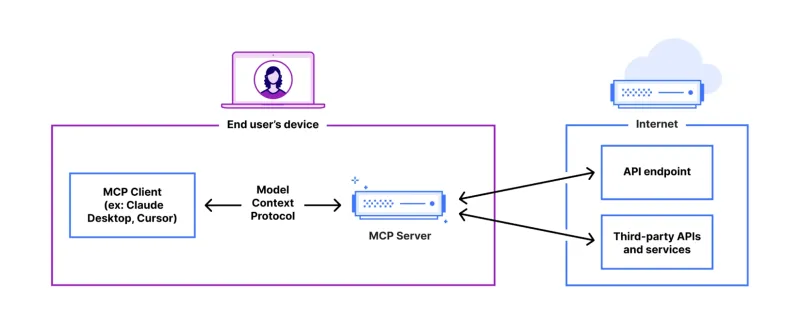
Fastapi -MCP初學者和專家教程-Analytics VidhyaMay 11, 2025 am 10:56 AM本教程演示瞭如何使用模型上下文協議(MCP)和FastAPI將大型語言模型(LLM)與外部工具集成在一起。 我們將使用FastAPI構建一個簡單的Web應用程序,並將其轉換為MCP服務器,使您的L
 dia-1.6b tts:最佳文本到二元格生成模型 - 分析vidhyaMay 11, 2025 am 10:27 AM
dia-1.6b tts:最佳文本到二元格生成模型 - 分析vidhyaMay 11, 2025 am 10:27 AM探索DIA-1.6B:由兩個本科生開發的開創性的文本對語音模型,零資金! 這個16億個參數模型產生了非常現實的語音,包括諸如笑聲和打噴嚏之類的非語言提示。本文指南
 AI可以使指導比以往任何時候都更有意義May 10, 2025 am 11:17 AM
AI可以使指導比以往任何時候都更有意義May 10, 2025 am 11:17 AM我完全同意。 我的成功與導師的指導密不可分。 他們的見解,尤其是關於業務管理,構成了我的信念和實踐的基石。 這種經驗強調了我對導師的承諾


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

Video Face Swap
使用我們完全免費的人工智慧換臉工具,輕鬆在任何影片中換臉!

熱門文章
熱工具

SublimeText3 Linux新版
SublimeText3 Linux最新版

ZendStudio 13.5.1 Mac
強大的PHP整合開發環境

EditPlus 中文破解版
體積小,語法高亮,不支援程式碼提示功能

SAP NetWeaver Server Adapter for Eclipse
將Eclipse與SAP NetWeaver應用伺服器整合。

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

