


arXiv論文“Unifying Voxel-based Representation with Transformer for 3D Object Detection“,22年6月,香港中文大學、香港大學、曠視科技(紀念孫劍博士)和思謀科技等。

本文提出一個統一的多模態3-D目標偵測框架,稱為UVTR。此方法旨在統一體素空間的多模態表示,實現準確、穩健的單模態或跨模態3-D檢測。為此,首先設計模態特定空間來表示體素特徵空間的不同輸入。在不進行高度資訊(height)壓縮的情況下保留體素空間,減輕語義歧義並實現空間交互作用。基於這種統一方式,提出跨模態交互,充分利用不同感測器的固有特性,包括知識遷移和模態融合。透過這種方式,可以很好地利用點雲的幾何-覺察表達式和影像中上下文豐富的特徵,獲得更好的性能和穩健性。
transformer解碼器用於從具備可學習位置的統一空間中高效取樣特徵,這有助於目標級互動。一般來說,UVTR代表在統一框架中表示不同模態的早期嘗試,在單模態和多模態輸入方面優於以往的工作,在nuScenes測試集上取得了領先的性能,激光雷達、相機和多模態輸出的NDS分別為69.7%、55.1%和71.1%。
程式碼:https://github.com/dvlab-research/UVTR.
如圖所示:
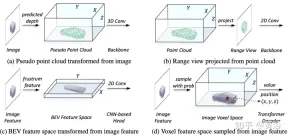
在表徵統一過程中,可以大致分為輸入級流和特徵級流的表示。對於第一種方法,多模態資料在網路開始時對齊。特別是,圖(a)中的偽點雲是從預測深度輔助的影像轉換而來的,而圖(b)中的距離視圖影像是從點雲投影而來的。由於偽點雲的深度不準確和距離視圖影像中的3-D幾何塌陷,資料的空間結構受到破壞,從而導致較差的結果。對於特徵級方法,典型的方法是將影像特徵轉換為截錐(frustum),然後壓縮到BEV空間,如圖(c)所示。然而,由於其類似射線的軌跡,每個位置的高度資訊(height)壓縮聚合了各種目標的特徵,因此引入了語義多義。同時,他隱式方式很難支援3-D空間中的顯式特徵交互,並限制進一步的知識遷移。因此,需要一種更統一的表示法來彌合模態的差距,並促進多方面的互動。
本文所提出的框架,將基於體素的表示與transformer統一。特別是,在基於體素的顯式空間中影像和點雲的特徵表徵和交互作用。對於影像,根據預測的深度和幾何約束,從影像平面採樣特徵來建構體素空間,如圖(d)所示。對於點雲,準確的位置自然允許特徵與體素相關聯。然後,引入體素編碼器進行空間交互,建立相鄰特徵之間的關係。這樣,跨模態交互作用自然地與每個體素空間的特徵進行。對於目標級交互,採用可變形transformer作為解碼器,對統一體素空間中每個位置(x、y、z)的目標查詢特定特徵進行取樣,如圖(d)所示。同時,3-D查詢位置的引入有效地緩解了BEV空間中高度資訊(height)壓縮帶來的語意多義。
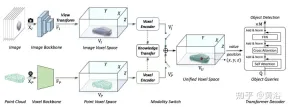
如圖是多模態輸入的UVTR架構:給定單幀或多幀影像和點雲,首先在單一主幹處理,並將其轉換為特定於模態的空間VI和VP,其中視圖轉換用於影像。在體素編碼器中,特徵在空間上相互作用,並且 知識遷移在訓練期間易於支援。根據不同的設置,透過模態開關選擇單模態或多模態特徵。最後,從具備可學習位置的統一空間VU中取樣特徵,利用transformer解碼器進行預測。
如圖是視圖變換的細節:

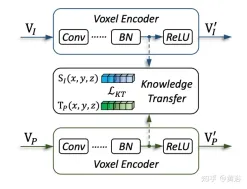
#如圖是知識遷移的細節:
實驗結果如下:


以上是Transformer統一化3D目標偵測基於體素的表徵的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 如何訪問OpenAi O1? - 分析VidhyaApr 13, 2025 am 11:05 AM
如何訪問OpenAi O1? - 分析VidhyaApr 13, 2025 am 11:05 AM介紹 草莓在市場上! ! !我希望這將像其他OpenAI最新車型帶來的人工智能的最新進步一樣富有成果。 我們一直在等待GPT-5這麼長時間
 使用llamaindex構建多文件代理抹布Apr 13, 2025 am 11:03 AM
使用llamaindex構建多文件代理抹布Apr 13, 2025 am 11:03 AM介紹 在人工智能快速發展的領域中,處理和理解大量信息的能力變得越來越重要。輸入多文件代理抹布 - 一個功能強大的應用
 免費學習SQL的YouTube頻道 - 分析VidhyaApr 13, 2025 am 10:46 AM
免費學習SQL的YouTube頻道 - 分析VidhyaApr 13, 2025 am 10:46 AM介紹 掌握SQL(結構化查詢語言)對於追求數據管理,數據分析和數據庫管理的個人至關重要。如果您是從新手開始的,或者是經驗豐富的專業人士,請尋求改進,
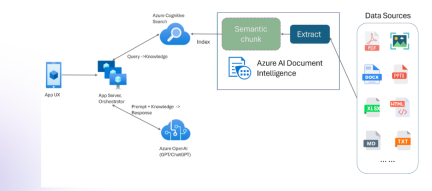 具有多模式和Azure文檔智能的抹布Apr 13, 2025 am 10:38 AM
具有多模式和Azure文檔智能的抹布Apr 13, 2025 am 10:38 AM介紹 在基於數據運行的當前世界中,關係AI圖(RAG)通過關聯數據並繪製關係來對行業產生很大影響。但是,如果一個人可以再進一步多怎麼辦
 在生成AI時代負責的AIApr 13, 2025 am 10:28 AM
在生成AI時代負責的AIApr 13, 2025 am 10:28 AM介紹 現在,我們生活在人工智能時代,我們周圍的一切都在一天變得更加聰明。最先進的大語言模型(LLM)和AI代理,能夠執行複雜的任務
 GPT-4O vs OpenAI O1:新的Openai模型值得炒作嗎?Apr 13, 2025 am 10:18 AM
GPT-4O vs OpenAI O1:新的Openai模型值得炒作嗎?Apr 13, 2025 am 10:18 AM介紹 Openai已根據備受期待的“草莓”建築發布了其新模型。這種稱為O1的創新模型增強了推理能力,使其可以通過問題進行思考
 小語言模型的微調和推斷Apr 13, 2025 am 10:15 AM
小語言模型的微調和推斷Apr 13, 2025 am 10:15 AM介紹 想像一下,您正在建立醫療聊天機器人,大量的,渴望資源的大型語言模型(LLMS)似乎滿足您的需求。那是小語言模型(SLM)等傑瑪(SLM)發揮作用
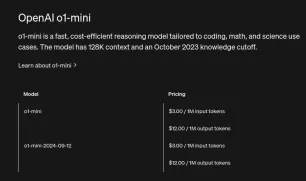 如何訪問OpenAi O1 API |分析VidhyaApr 13, 2025 am 10:14 AM
如何訪問OpenAi O1 API |分析VidhyaApr 13, 2025 am 10:14 AM介紹 OpenAI的O1系列模型代表了大語言模型(LLM)功能的重大飛躍,尤其是對於復雜的推理任務。這些模型在RESP之前從事深厚的內部思維過程


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

MinGW - Minimalist GNU for Windows
這個專案正在遷移到osdn.net/projects/mingw的過程中,你可以繼續在那裡關注我們。 MinGW:GNU編譯器集合(GCC)的本機Windows移植版本,可自由分發的導入函式庫和用於建置本機Windows應用程式的頭檔;包括對MSVC執行時間的擴展,以支援C99功能。 MinGW的所有軟體都可以在64位元Windows平台上運作。

MantisBT
Mantis是一個易於部署的基於Web的缺陷追蹤工具,用於幫助產品缺陷追蹤。它需要PHP、MySQL和一個Web伺服器。請查看我們的演示和託管服務。

Safe Exam Browser
Safe Exam Browser是一個安全的瀏覽器環境,安全地進行線上考試。該軟體將任何電腦變成一個安全的工作站。它控制對任何實用工具的訪問,並防止學生使用未經授權的資源。

SublimeText3 Mac版
神級程式碼編輯軟體(SublimeText3)

Dreamweaver Mac版
視覺化網頁開發工具

