


arXiv論文“Sim-to-Real Domain Adaptation for Lane Detection and Classification in Autonomous Driving“,2022年5月,加拿大滑鐵盧大學的工作。

雖然自主駕駛的監督偵測和分類框架需要大型標註資料集,但光照真實模擬環境產生的合成資料所推動的無監督域適應(UDA ,Unsupervised Domain Adaptation)方法則是低成本、耗時更少的解決方案。本文提出對抗性鑑別和生成(adversarial discriminative and generative)方法的UDA方案,用於自動駕駛的車道線檢測和分類應用。
也介紹Simulanes資料集產生器,利用CARLA的巨大交通場景和天氣條件,創建一個自然的合成資料集。提出的UDA框架將帶有標籤的合成資料集作為來源域,而目標域是未標記的真實資料。用對抗生成和特徵鑑別器,調試學習模型,預測目標域的車道位置和類別。用真實資料集和合成資料集進行評估。
開源UDA框架在githubcom/anita-hu/sim2real-lane-detection,還有資料集產生器在github.com/anita-hu/simulanes。
現實世界中的駕駛具有多樣性,交通條件、天氣和周圍環境也各不相同。因此,模擬場景的多樣性對模型在現實世界中的良好適應性至關重要。有許多用於自動駕駛的開源模擬器,即CARLA和LGSVL。本文選擇CARLA來產生模擬資料集,除靈活的Python API外,CARLA還包含豐富的覆蓋城市、鄉村和公路場景的預先繪製地圖內容。
模擬資料產生器Simulanes在城市、鄉村和公路環境中產生了各種模擬場景,包括15個車道類別和動態天氣。如圖顯示來自合成資料集的樣本。行人和車輛參與者隨機產生並放置在地圖上,透過遮蔽增加資料集的難度。根據TuSimple和CULane資料集,將車輛附近的最大車道數限制為4條,並用行錨點為標籤。

由於CARLA模擬器不會直接給予車道位置標籤,用CARLA的路點系統(waypoint system)產生標籤。 CARLA路點是車輛autopilot要遵循的預定義位置,位於車道中心。為了獲得車道位置標籤,將目前車道的路點左右移動W/2,其中W是模擬器給定的車道寬度。然後將這些移動的路點投影到攝影機座標系,並採用樣條曲線擬合,以便沿著預定的行錨點產生標籤。類別標籤由模擬器給出,是15個類別的一個。
為了產生具有N幀的資料集,將N均勻地劃分到所有可用的地圖上。從預設的CARLA地圖中,用城鎮1、3、4、5、7和10,而城鎮2和6由於提取的車道位置標籤與圖像的車道位置之間存在差異而未使用。對每個地圖,車輛參與者在隨機位置生成,並隨機移動。動態天氣透過將時間作為正弦函數平滑地改變太陽的位置並偶爾產生風暴來實現,風暴透過雲量、水量和積水等變數影響環境的外觀。為了避免在同一位置保存多個幀,檢查車輛是否已從前一幀位置移動,如果這個車輛停止太長時間,則重新生成新的車輛。
當sim-to-real演算法應用於車道偵測時,採用端對端的方法,並使用Ultra- Fast-Lane-Detection(UFLD)模型作為基礎網路。之所以選擇UFLD,是因為其輕量級架構可以在相同輸入解析度下實現300幀/秒速度,同時具有與最先進方法相當的性能。 UFLD將車道偵測任務表述為基於行的選擇法,其中每個車道由預先定義行的一系列水平位置表示,即行錨點。對於每個行錨點,位置被劃分為w網格單元。對於第i條車道和第j行錨點,位置預測成為一個分類問題,其中模型輸出選擇(w 1)網格單元的機率Pi,j。輸出中的附加維度是無車道。
UFLD提出一個輔助分割分支,在多尺度上聚集特徵來建模局部特徵,這個只在訓練期間使用。隨UFLD方法,交叉熵損失用於分割損失Lseg。對於車道分類,增加一個全連接(FC)層的小分支,接收與車道位置預測的FC層相同的特徵。車道分類損失Lcls也使用交叉熵損失。
為了緩解UDA設定的域漂移問題,採用了UNIT(“Unsupervised Image-to-Image Translation Networks“,NIPS,2017)& MUNIT(「Multimodal unsupervised image-to-image translation,」 ECCV 2018)的對抗性生成方法,以及使用特徵鑑別器的對抗性判別方法。如圖所示:提出了對抗性生成方法(A)和對抗性判別方法(B)。 UNIT和MUNIT在(A)中表示,其中顯示用於影像翻譯(image translation)的生成器輸入。 MUNIT的附加風格輸入以藍色虛線顯示。為了簡單起見,省略了MUNIT風格的編碼器輸出,因為它不用於影像翻譯。

實驗結果如下:
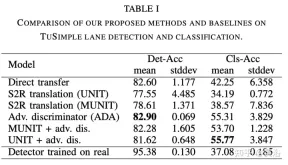
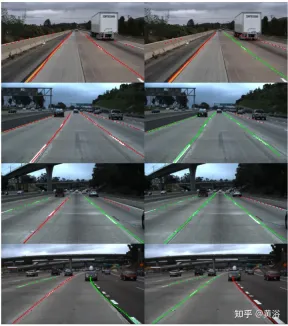
#左:直接遷移法,右:對抗鑑別(ADA)方法
以上是自動駕駛車道線偵測分類的虛擬-真實域適應方法的詳細內容。更多資訊請關注PHP中文網其他相關文章!

 Kaggle Grandmasters使用的頂級Python圖書館Apr 17, 2025 am 10:03 AM
Kaggle Grandmasters使用的頂級Python圖書館Apr 17, 2025 am 10:03 AM解鎖Kaggle Grandmasters的秘密:頂級Python圖書館揭示了 Kaggle是數據科學競賽的主要平台,擁有精選的精英表演者:Kaggle Grandmasters。 這些人一貫提供Innova
 AI PC會改變您的工作場所的10種方法-Analytics VidhyaApr 17, 2025 am 09:59 AM
AI PC會改變您的工作場所的10種方法-Analytics VidhyaApr 17, 2025 am 09:59 AM工作的未來:AI PC將如何徹底改變工作場所 人工智能(AI)集成到個人計算機(AI PC)中代表了工作場所技術的重大飛躍。 AI PC,定義為AI的融合
 如何在Excel中冷凍窗格?Apr 17, 2025 am 09:56 AM
如何在Excel中冷凍窗格?Apr 17, 2025 am 09:56 AMExcel凍結窗格功能詳解:高效處理大型數據集 Microsoft Excel是組織和分析數據的優秀工具之一,而“凍結窗格”功能更是其一大亮點。此功能允許您固定特定行或列,使其在瀏覽其餘電子表格時保持可見,從而簡化數據監控和比較。本文將深入探討Excel凍結窗格功能的使用方法,並提供一些實用技巧和示例。 功能概述 Excel的凍結窗格功能可在滾動瀏覽大型數據集時,保持特定行或列可見,方便數據監控和比較。 提升導航效率,保持標題可見,簡化大型電子表格中的數據比較。 提供通過“視圖”選項卡和“凍
 Neo4J與亞馬遜海王星:數據工程中的圖形數據庫Apr 17, 2025 am 09:52 AM
Neo4J與亞馬遜海王星:數據工程中的圖形數據庫Apr 17, 2025 am 09:52 AM導航互連數據的複雜性:Neo4J與亞馬遜海王星 在當今數據豐富的世界中,有效管理複雜的互連信息至關重要。儘管傳統數據庫仍然相關,但他們經常與HI鬥爭
 META SAM 2:建築,應用和局限性-Analytics VidhyaApr 17, 2025 am 09:40 AM
META SAM 2:建築,應用和局限性-Analytics VidhyaApr 17, 2025 am 09:40 AMMeta的細分段的任何模型2(SAM-2):實時圖像和視頻細分方面的巨大飛躍 Meta再次通過SAM-2推動了人工智能的界限,SAM-2是計算機視覺的開創性進步
 人工智能工作流程和消費者體驗的數據策略Apr 17, 2025 am 09:39 AM
人工智能工作流程和消費者體驗的數據策略Apr 17, 2025 am 09:39 AM通過AI增強數字消費者體驗:一種數據驅動的方法 數字景觀具有激烈的競爭力。 本文探討了人工智能(AI)如何顯著改善數字平台上的消費者體驗。我們會考試
 穩定擴散中的位置編碼是什麼? - 分析VidhyaApr 17, 2025 am 09:34 AM
穩定擴散中的位置編碼是什麼? - 分析VidhyaApr 17, 2025 am 09:34 AM穩定的擴散:在文本到圖像中揭示位置編碼的力量 想像一下,從簡單的文本描述中產生令人嘆為觀止的高分辨率圖像。 這是穩定擴散的力量,一種尖端的文本對圖像模型
 什麼是SQL中的模式?組件,優勢等Apr 17, 2025 am 09:33 AM
什麼是SQL中的模式?組件,優勢等Apr 17, 2025 am 09:33 AM了解SQL模式:綜合指南 想像一下為新建築設計藍圖。 就像建築師創建詳細的計劃一樣,SQL模式也提供了用於在數據庫中組織數據的藍圖。 本指南說明了什麼SQL模式


熱AI工具

Undresser.AI Undress
人工智慧驅動的應用程序,用於創建逼真的裸體照片

AI Clothes Remover
用於從照片中去除衣服的線上人工智慧工具。

Undress AI Tool
免費脫衣圖片

Clothoff.io
AI脫衣器

AI Hentai Generator
免費產生 AI 無盡。

熱門文章
熱工具

禪工作室 13.0.1
強大的PHP整合開發環境

記事本++7.3.1
好用且免費的程式碼編輯器

Safe Exam Browser
Safe Exam Browser是一個安全的瀏覽器環境,安全地進行線上考試。該軟體將任何電腦變成一個安全的工作站。它控制對任何實用工具的訪問,並防止學生使用未經授權的資源。

WebStorm Mac版
好用的JavaScript開發工具

mPDF
mPDF是一個PHP庫,可以從UTF-8編碼的HTML產生PDF檔案。原作者Ian Back編寫mPDF以從他的網站上「即時」輸出PDF文件,並處理不同的語言。與原始腳本如HTML2FPDF相比,它的速度較慢,並且在使用Unicode字體時產生的檔案較大,但支援CSS樣式等,並進行了大量增強。支援幾乎所有語言,包括RTL(阿拉伯語和希伯來語)和CJK(中日韓)。支援嵌套的區塊級元素(如P、DIV),

