
機器人把握好手上的力道,安全做家事有多難? 1X人工智慧副總裁撰文詳解

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB原創
- 2024-09-02 16:34:12931瀏覽


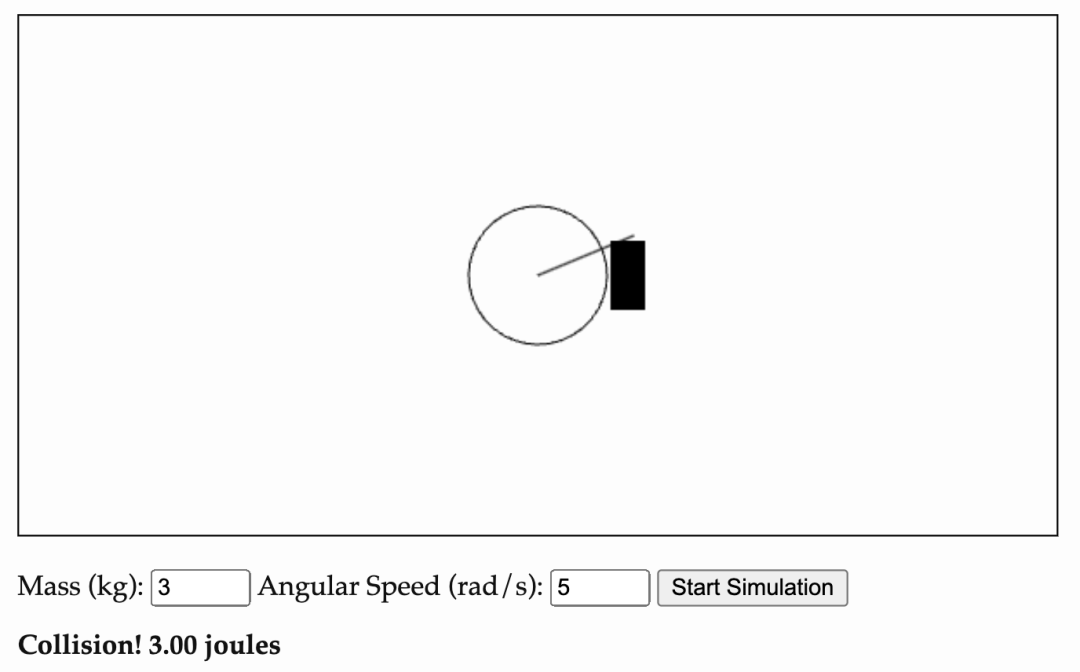
 ,其中 I 是轉動慣量,ω 是角速度。因為假設槓桿沒有質量,系統的慣性相當於一個固定的圓柱體:
,其中 I 是轉動慣量,ω 是角速度。因為假設槓桿沒有質量,系統的慣性相當於一個固定的圓柱體: 。代入數值可以算出 I = 0.24 kg⋅m^2。因此,可以進一步計算出這個系統的旋轉動能為 3 焦耳。
。代入數值可以算出 I = 0.24 kg⋅m^2。因此,可以進一步計算出這個系統的旋轉動能為 3 焦耳。 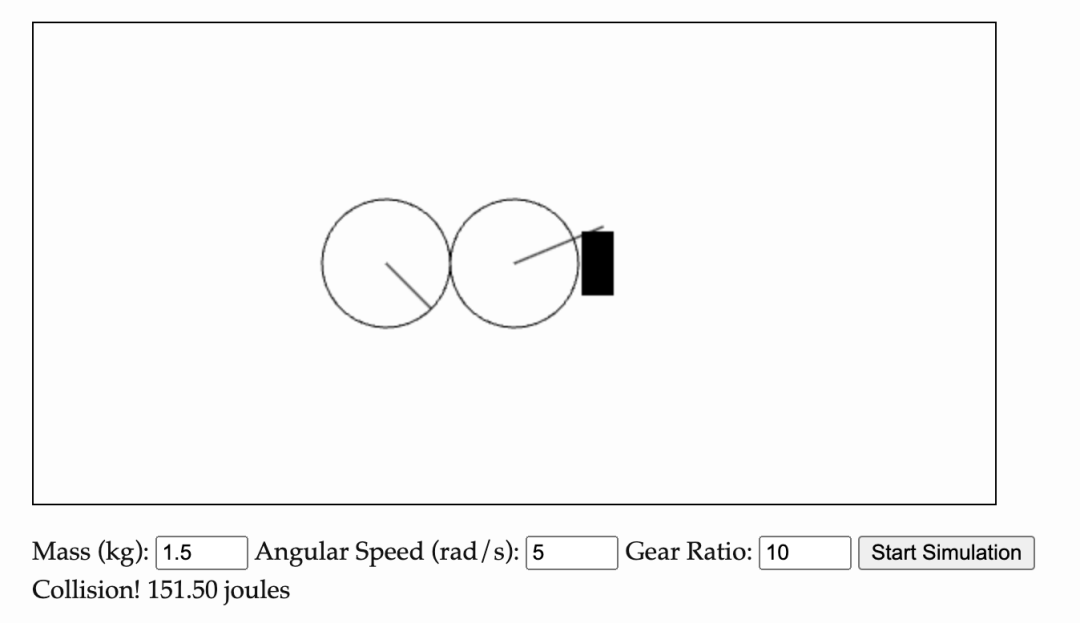

The reason is that the gearbox provides critical mechanical leverage: many motors cannot provide enough torque when working alone, so engineers install gears on high-speed motors. Speed is sacrificed for necessary torque.
This kind of gear system is "rigid" and cannot be "reverse driven". Once the gears start to rotate, they will bite together tightly and it will be difficult to Turn back. So at the other end of the gearbox, more force needs to be exerted to resist the rotational force generated by the high-speed motor.
Based on the above considerations, 1X Technologies has been committed to manufacturing high-torque, low-speed motors for the past ten years to maximize the safety of the transmission system. Thanks to the motor and drive system used by the NEO robot with smaller gear ratios and lighter weight, it has become the first truly domestic robot that can be safely integrated into the home environment.
1. Data is the basis for the progress of general robots. bottleneck". Robotic hardware is expensive, and hiring human remote operators to perform tasks using bulky hardware is equally expensive. Moreover, the efficiency of remote operation is very low, far lower than the speed at which humans can directly complete tasks.
2. If we strap head-mounted cameras to people and have them wear large rubber gloves that cover their flesh, we can quickly collect A large dataset of people performing various chores and tasks. Ordinary people unconsciously complete a large number of different actions and operational tasks in their daily lives. Although there are difficulties in directly perceiving the raw motion output, we can infer actions by analyzing pose changes in videos. This type of data collection could help break down barriers to the development of general-purpose robots until more advanced hardware becomes available.
3. There are many first-person and third-person videos on the Internet, which can train robots to recognize and learn various activities people perform in videos, thereby further expanding our Data size.
Before scaling up this type of data collection, it is also important to note that there are no fast-rotating parts in our bodies. Compared to a motor rotating at 5000 RPM, the kinetic energy of muscles Very low, the effective mass we carry when moving is also much smaller, so you will find that while a robot's joint angles may be roughly the same as a human's, the effective mass provided by its rotating motors may be too large to perform the task dexterously .
Even if we develop efficient motion control strategies, robots still cannot reach human speed and fluency when performing actions such as easily turning lights on and off or running gracefully. This is because the forces exerted by robots when touching objects are significantly different from humans.
So if you want to quickly convert human videos into robot movement strategies, you need the following methods:
1. A very compliant and flexible robot like NEO
2. Let the robot track the motion trajectory of the video at a speed slower than 1x, instead of directly copying " "Human Hardware" dynamics. However, this is only suitable for static operation tasks, and is not suitable for tasks that require contact with many objects, such as folding clothes and preparing food in the kitchen.
3. Decouple motion planning and dynamic planning, allowing motion planning to focus on reaching the target position, while dynamic planning focuses on controlling the force when a collision occurs.
以上是機器人把握好手上的力道,安全做家事有多難? 1X人工智慧副總裁撰文詳解的詳細內容。更多資訊請關注PHP中文網其他相關文章!
陳述:
本文內容由網友自願投稿,版權歸原作者所有。本站不承擔相應的法律責任。如發現涉嫌抄襲或侵權的內容,請聯絡admin@php.cn