
西浦、利物浦大學提出:點雲資料增強首個全面綜述

- PHPz原創
- 2024-06-07 18:54:46816瀏覽

AIxiv專欄是本站發布學術、技術內容的欄位。過去數年,本站AIxiv專欄接收通報了2,000多篇內容,涵蓋全球各大專院校與企業的頂尖實驗室,有效促進了學術交流與傳播。如果您有優秀的工作想要分享,歡迎投稿或聯絡報道。投稿信箱:liyazhou@jiqizhixin.com;zhaoyunfeng@jiqizhixin.com
在深度學習領域,當可用的訓練資料集有限時,資料增強常被使用。這涉及執行一系列特定的操作來修改或擴展原始數據,從而增加數據集的數量和多樣性。
由於優質的增強資料集有助於提高網路的穩健性、增強泛化能力並減少過度擬合,因此在訓練深度學習網路時,數據增強幾乎總是被視為理想的選擇。在圖像資料增強和文字資料增強領域,已經觀察到了全面的發展。
在眾多近期發表的點雲處理任務的研究論文中,研究人員探討了各種增強點雲資料的方法。這些方法的廣泛範圍為研究者在選擇合適的方法時帶來了挑戰。因此,系統地調查這些方法並將它們分類成不同組別具有重要價值。
本文呈現了一個關於點雲資料增強方法的全面調查。
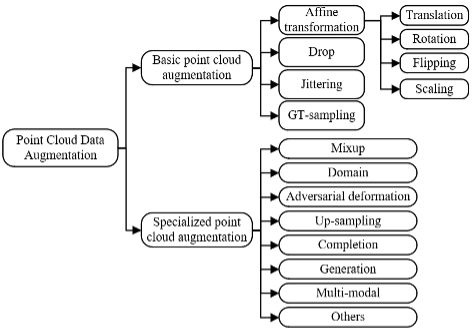
基於我們的調查,我們提出了一個這些增強方法的分類體系,如圖1所示。
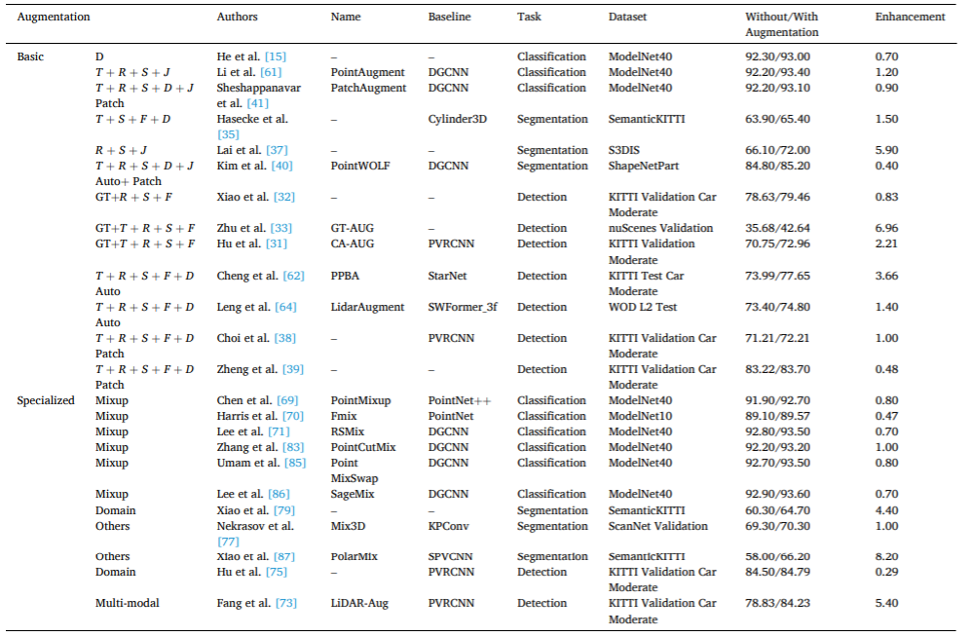
增強方法可以被分成兩個主要類別:基礎點雲增強和特定點雲增強,這與影像增強的典型分類方法相似。
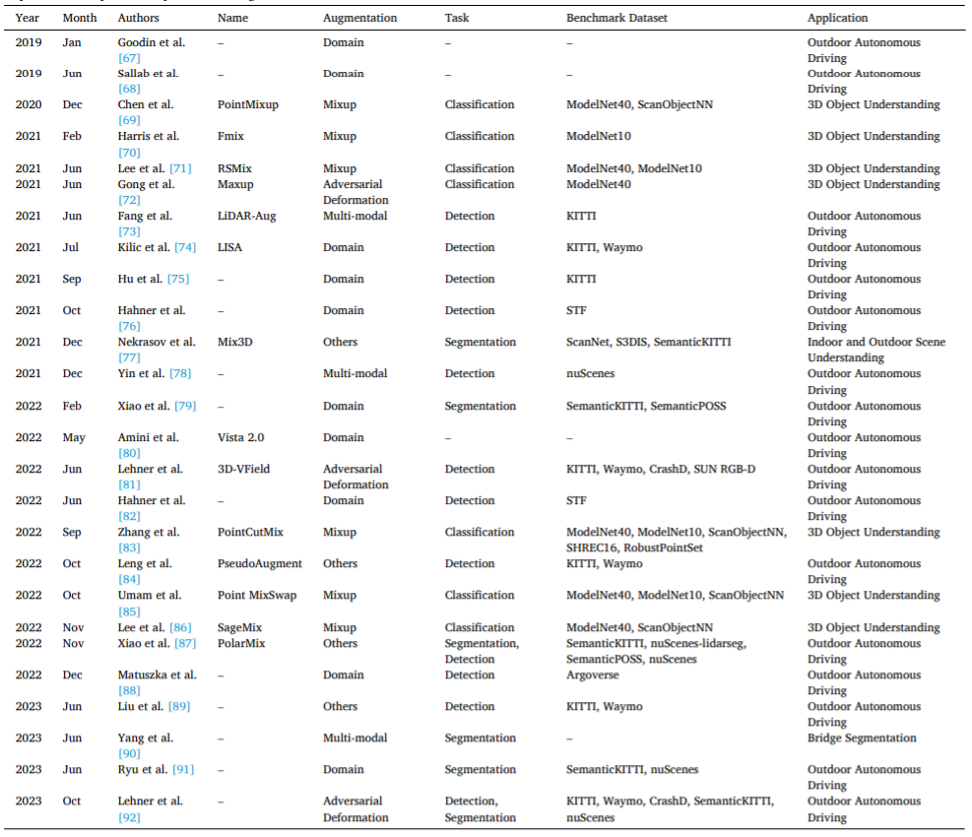
這是第一篇全面調查點雲資料增強方法的綜述,涵蓋了點雲資料增強的最新進展。根據增強操作的特質,我們提出了一個點雲資料增強方法的分類系統。 本研究總結了各種點雲資料增強方法,討論了它們在典型的點雲處理任務(如檢測、分割和分類)中的應用,並為未來的潛在研究提供了建議。
-
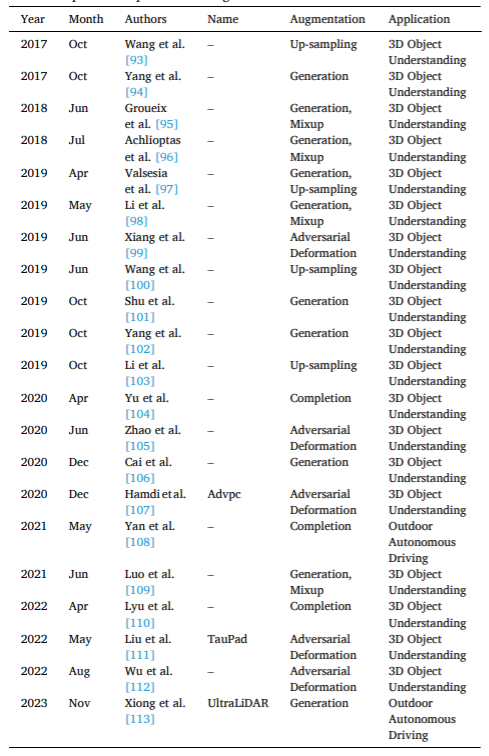
Researchers have not fully studied point cloud data augmentation confrontation Morphing, upsampling, completion and generation. Given the advances in GANs and diffusion models, these models can be used to generate realistic and diverse point cloud instances. Future research should evaluate these methods on benchmark datasets on specific point cloud processing tasks to assess their effectiveness as augmentation techniques. -
Currently, there are few studies to evaluate point cloud data augmentation methods using consistent baseline networks and datasets for different point cloud processing tasks. performance. Such an evaluation will enhance our understanding of the performance of different augmentation methods. Therefore, future research efforts may focus on establishing new methods, metrics, and/or datasets to evaluate the effectiveness of point cloud data augmentation methods and their impact on deep learning model performance. -
Some specific augmentation methods can be computationally expensive when applied to large-scale point cloud datasets. Future work can focus on developing efficient algorithms that trade off computational cost and enhanced efficiency. In addition, some specific point cloud enhancement methods are relatively complex and difficult to reproduce. It is recommended to develop a plug-and-play approach to promote its widespread adoption. -
For point cloud data enhancement, there is a lack of a universally accepted combination of basic enhancement operations. Therefore, future work is needed to establish a standard protocol for selecting augmentation operations for different application domains, tasks, and/or data sets without sacrificing augmentation efficiency. -
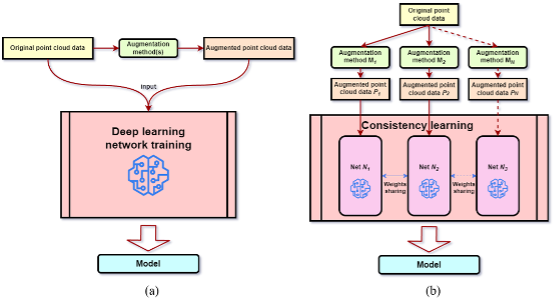
#Multiple point cloud variants generated through augmentation will affect the effectiveness of consistency learning. Currently, to the best of our knowledge, only basic boosting methods are used in consistency learning. Exploring specific point cloud enhancement methods, such as adversarial deformation and generative enhancement, provides an interesting way to improve the effectiveness of consistency learning and is considered a valuable future research direction. -
Currently, there is limited research on combining basic point cloud enhancement methods with specific point cloud enhancement methods. Such a combination has the potential to further increase the versatility of data augmentation and deserves future research. -
Enhancement needs to realistically simulate changes in point cloud data, such as changes in object size, position, orientation, appearance and environment, to ensure that simulated data Be consistent with real-world situations and remain semantically correct. Future research could look at standardizing the various enhancement ranges to suit specific application scenarios. -
Some applications, such as object detection, may involve dynamic objects in the scene. Point clouds captured in dynamic environments may require specific enhancement strategies that take into account temporal changes in objects. For example, a specific trajectory of a moving object can be designed, which can be achieved through a set of combined enhancement operations, such as translation, rotation, and discarding. -
ViT also achieves strong performance on segmentation and classification tasks by simply combining basic operations. It would be meaningful to explore the performance of the enhanced method when integrated with the state-of-the-art ViT as a backbone network.
以上是西浦、利物浦大學提出:點雲資料增強首個全面綜述的詳細內容。更多資訊請關注PHP中文網其他相關文章!