
Rumah >Tutorial sistem >LINUX >Nota Pemula ORB-SLAM2
Nota Pemula ORB-SLAM2

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2024-04-19 21:22:011158semak imbas
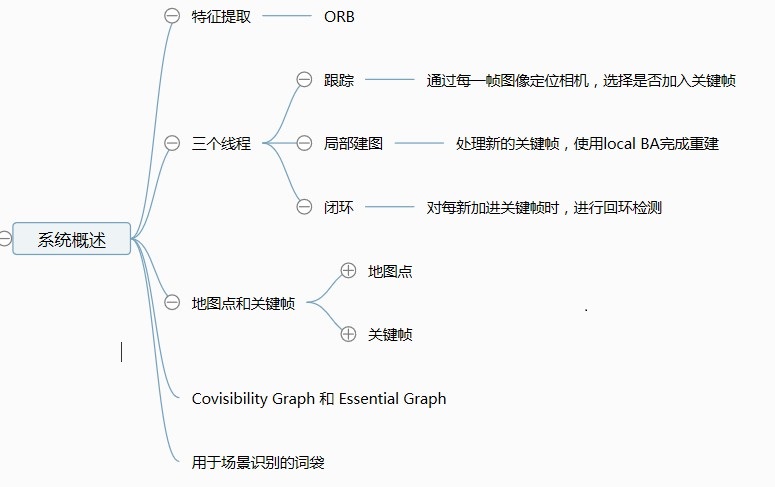
Tiga utas disimpan dalam tiga fail yang sepadan, iaitu fail Tracking.cpp, LocalMapping.cpp dan LoopClosing.cpp.
(1) Penjejakan(Penjejakan)
Kerja utama bahagian ini adalah untuk mengekstrak ciri ORB daripada imej, melakukan anggaran pose berdasarkan bingkai sebelumnya, atau memulakan pose melalui penempatan semula global, kemudian menjejaki peta tempatan yang dibina semula, mengoptimumkan pose, dan kemudian menentukan perkara penting baharu mengikut kepada beberapa peraturan.
(2)Pemetaan(Pemetaan Tempatan)
Bahagian ini terutamanya melengkapkan pembinaan peta tempatan. Ia termasuk memasukkan bingkai utama, mengesahkan dan menapis titik peta yang dijana baru-baru ini, kemudian menjana titik peta baharu, menggunakan pelarasan berkas setempat (BA Tempatan), dan akhirnya menapis bingkai kunci yang dimasukkan untuk mengalih keluar bingkai utama yang berlebihan.
(3)Pengesanan gelung tertutup(LoopClosing)
Bahagian ini terbahagi kepada dua proses, iaitu pengesanan gelung tertutup dan pembetulan gelung tertutup. Pengesanan gelung tertutup mula-mula menggunakan WOB untuk pengesanan, dan kemudian mengira transformasi persamaan melalui algoritma Sim3. Pembetulan gelung tertutup terutamanya gabungan gelung tertutup dan pengoptimuman graf bagi Graf Penting.
Atas ialah kandungan terperinci Nota Pemula ORB-SLAM2. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!