
Rumah >Peranti teknologi >AI >Haomo Cam4DOcc dipilih untuk CVPR2024: hanya menggunakan kamera untuk ramalan rangkaian 4D, memberikan pemanduan autonomi keupayaan untuk meramal ruang dan masa
Haomo Cam4DOcc dipilih untuk CVPR2024: hanya menggunakan kamera untuk ramalan rangkaian 4D, memberikan pemanduan autonomi keupayaan untuk meramal ruang dan masa

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2024-03-07 14:19:021150semak imbas
Pada 27 Februari 2024, kertas kerja "Cam4DOcc: Penanda Aras untuk Ramalan Penghuni 4D Kamera Sahaja dalam Aplikasi Pemanduan Autonomi" yang dikemukakan oleh pasukan teknologi kecerdasan buatan HaoMo Zhixing telah berjaya dipilih untuk persidangan antarabangsa teratas CVPR 2024.
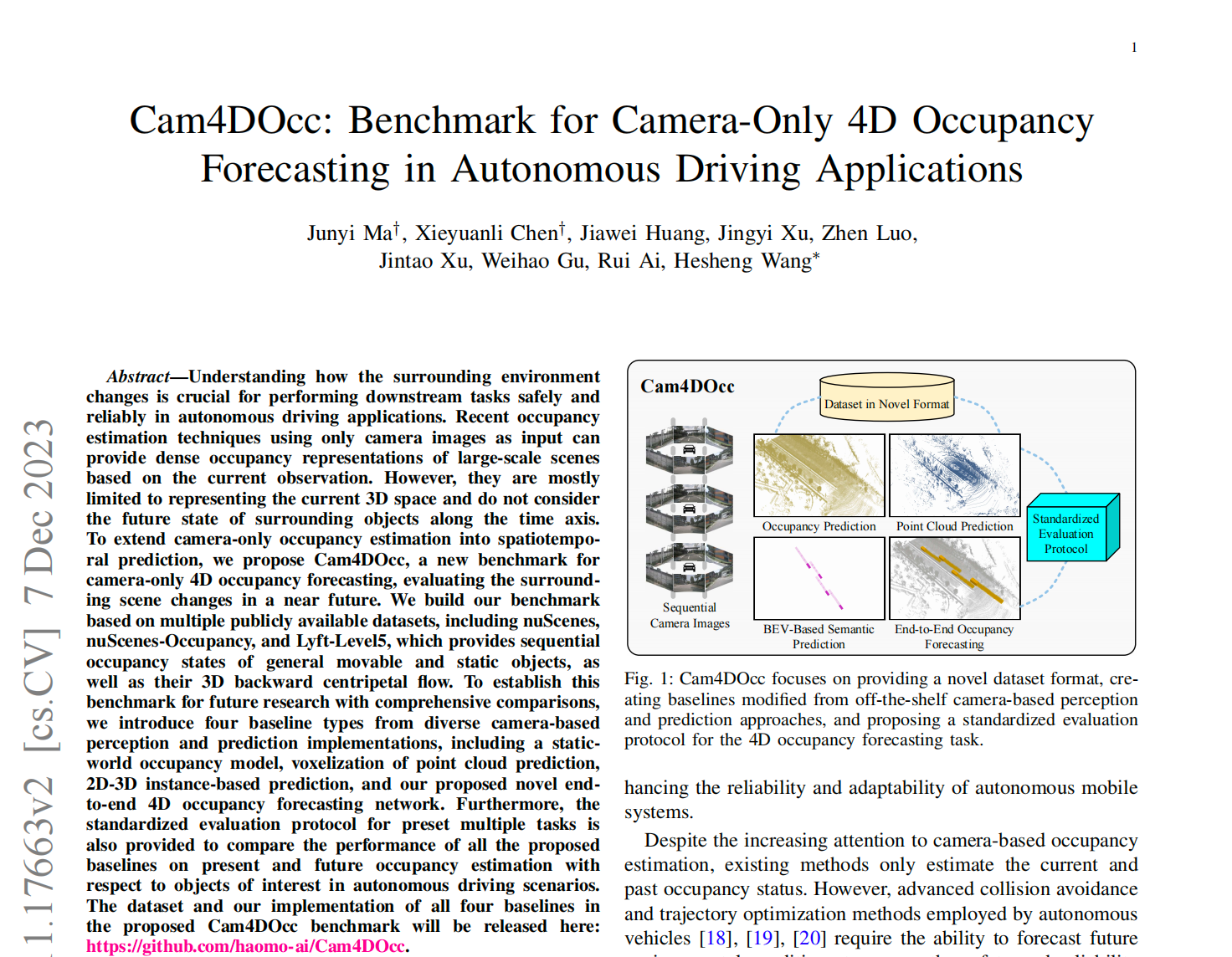
Cam4DOcc ialah penanda aras baharu yang dicadangkan oleh Hao Mo, yang menggunakan kamera untuk ramalan grid penghunian 4D. Kaedah ini boleh menilai perubahan dalam pemandangan sekeliling dalam masa terdekat, memanjangkan anggaran grid penghunian kamera kepada ramalan spatiotemporal. Dengan cara ini, keupayaan sistem pemanduan autonomi untuk melihat dan meramalkan perubahan dinamik dalam persekitaran sekeliling telah dipertingkatkan.
Pertama, Hao Mo mencipta set data format baharu berdasarkan beberapa set data yang tersedia secara umum, dan seterusnya mencadangkan protokol penilaian piawai dan empat jenis garis dasar untuk menyediakan rujukan asas bagi penanda aras Cam4DOcc. Kedua, Haimo mencadangkan OCFNet rangkaian ramalan penghunian 4D berasaskan kamera pertama untuk menganggarkan status penghunian masa hadapan secara menyeluruh. Akhirnya, Haomo menjalankan berbilang percubaan berdasarkan penanda aras Cam4DOcc, yang melibatkan empat tugasan berbeza, untuk menilai secara menyeluruh garis dasar yang dicadangkan serta OCFNet. Keputusan percubaan menunjukkan bahawa OCFNet mengatasi semua garis dasar dan menghasilkan penghunian masa depan yang munasabah walaupun apabila melihat data latihan yang terhad. Dengan membandingkan empat jenis garis dasar yang berbeza, Haomo menunjukkan bahawa rangkaian spatiotemporal hujung ke hujung mungkin merupakan hala tuju penyelidikan yang paling menjanjikan untuk ramalan penghunian hanya menggunakan kamera. Tambahan pula, penggunaan anotasi GMO yang diluaskan dan aliran jejari terbalik 3D tambahan juga telah terbukti bermanfaat untuk ramalan penghunian 4D.

Persidangan IEEE mengenai Penglihatan Komputer dan Pengecaman Corak (CVPR) ialah salah satu daripada tiga persidangan teratas dalam bidang penglihatan komputer dan pengecaman corak Ia dianjurkan oleh Universiti Newcastle, Universiti Teknologi Sydney, John H. Top sekolah dan institusi seperti Universiti Princeton. CVPR mempunyai piawaian kemasukan yang sangat ketat kertas Haomo yang mencadangkan kaedah Cam4DOcc berjaya dipilih untuk CVPR2024, yang mewakili pengiktirafan pencapaian penerokaan teknologi Haomo.
Sejak penubuhannya, Haimo sentiasa berasaskan inovasi teknologi, terus memperoleh banyak paten teknologi yang menerajui industri, dan telah menerajui dalam membentangkan hala tuju pembangunan teknologi pemanduan autonomi dengan model besar, kuasa pengkomputeran besar, dan besar. data di China. DriveGPT model besar generatif pandu sendiri pertama industri, Xuehu·Hairuo, dikeluarkan oleh Haimo, telah membawa peningkatan teknologi yang besar dalam proses pembangunan sistem pemanduan autonomi, menjadikan pembangunan sistem pemanduan autonomi Haimou memasuki mod baharu sepenuhnya, dan ia juga telah sangat dipercepatkan Proses pembangunan kecerdasan automobil.
Atas ialah kandungan terperinci Haomo Cam4DOcc dipilih untuk CVPR2024: hanya menggunakan kamera untuk ramalan rangkaian 4D, memberikan pemanduan autonomi keupayaan untuk meramal ruang dan masa. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Tesla merancang untuk menubuhkan sebuah kilang kenderaan elektrik di India untuk mengaktifkan industri kenderaan elektrik India
- Untuk membantu pembangunan industri Yuanverse, pertandingan aplikasi inovatif komunikasi mudah alih ini telah dilancarkan
- Xiaoyu Yilian muncul di Ekspo Industri Pintar Antarabangsa China
- Skala industri pengkomputeran negara saya mencecah 2.6 trilion yuan, dengan lebih daripada 20.91 juta pelayan tujuan am dan 820,000 pelayan AI dihantar dalam tempoh enam tahun yang lalu.
- Forum Sidang Kemuncak Pembangunan Kolaboratif Rangkaian Industri Robot Delta Sungai Yangtze Pertama 2023 telah berjaya diadakan di Wuhu, Anhui