
Rumah >Peranti teknologi >AI >Sedikit tentang pelaksanaan garis lorong BEV
Sedikit tentang pelaksanaan garis lorong BEV

- WBOYke hadapan
- 2024-03-06 11:31:131146semak imbas
Sebiji benih telah ditanam pada tahun 2021
Pelajar yang telah membaca cerita halangan BEV harus tahu bahawa kumpulan kami mula membuat halangan BEV sekitar 21 Oktober. Pada masa itu, saya tidak berani berfikir untuk melakukan penandaan lorong BEV kerana tiada tenaga kerja. Tetapi saya masih ingat bahawa sekitar bulan Disember, kami bertemu dengan seorang calon Semasa temu duga, kami mendengar bahawa mereka telah bekerja pada penanda lorong BEV selama lebih daripada setengah tahun Keseluruhan laluan teknikal digunakan sebagai rangkaian penandaan lorong BEV. peta ketepatan Latih nilai sebenar dan katakan bahawa kesannya tidak buruk. Malangnya, calon itu tidak datang kepada kami akhirnya. Digabungkan dengan kandungan tanda lorong yang diajar pada hari Telsa AI pada tahun 2021, benih pembuatan tanda lorong BEV telah ditanam dalam kumpulan. . Tetapi pada masa itu, hanya ada seorang rakan sekelas dalam kumpulan kami (mari panggil dia Xiaoxuan buat masa ini) yang mempunyai 2 bulan untuk melakukan ini. Kemudian benih 2021 mula bercambah Kami akan bermula dengan data Pelajar Xiaoxuan masih sangat baik mengekstrak data garisan lorong di sekeliling kereta yang sepadan melalui peta berketepatan tinggi berkelajuan tinggi. Apabila ia dibuat, saya ingat semua orang masih sangat teruja.
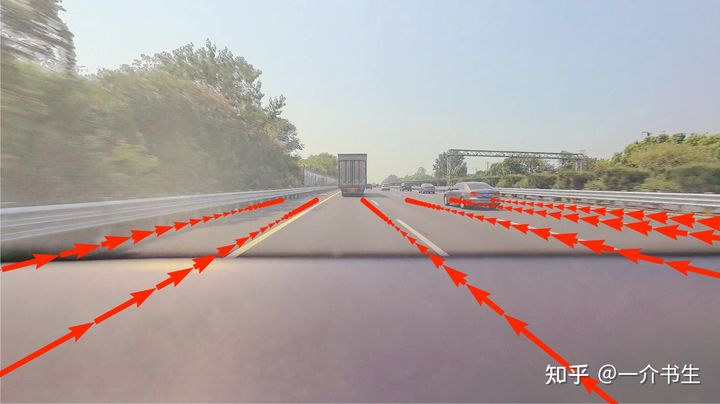
Rajah 1: Kesan garis lorong peta berketepatan tinggi yang ditayangkan pada sistem imejSeperti yang anda boleh lihat daripada Rajah 1, masih terdapat beberapa masalah dengan pasangan pemasangan, jadi Xiaoxuan membuat satu siri pengoptimuman. Dua bulan kemudian, Xiaoxuan pergi untuk melakukan tugas lain. Melihat ke belakang sekarang, kami telah mengambil langkah yang betul dalam meneroka laluan lorong BEV. Kerana pada tahun 2021 dan 22, banyak kertas dan kod baris lorong BEV yang sangat baik telah dibuka secara beransur-ansur. Melihat ini, anda mungkin berfikir bahawa mesti ada cerita yang sempurna tentang pelaksanaan garis lorong BEV pada tahun 2023. Walau bagaimanapun, cita-cita selalunya sangat memuaskan, tetapi realitinya sangat kejam.
Kerana halangan BEV kami telah membuktikan bahawa BEV boleh melalui jalan ini, dan ia juga telah menunjukkan keputusan yang baik dalam ujian jalan raya. Kumpulan itu mula mempunyai lebih banyak sumber untuk mempertimbangkan garis lorong Ambil perhatian bahawa ini bukan BEV. kenapa? Kerana pada masa ini, kami menghadapi banyak tekanan untuk pergi ke dalam talian, dan kami tidak mempunyai pengalaman yang mencukupi dalam laluan lorong BEV Dalam erti kata lain, hampir tiada orang dalam keseluruhan kumpulan yang telah membuat pengeluaran besar-besaran baris lorong 2D . Pada separuh pertama tahun 2023, ia benar-benar boleh digambarkan sebagai tersandung Kami mempunyai banyak perbincangan hangat secara dalaman, dan akhirnya memutuskan untuk membentuk dua baris, salah satunya ialah garisan lorong 2D: kebanyakan tenaga kerja berada di garisan lorong 2D, dan tumpuan adalah pada barisan lorong 2D, model ringan dan pengumpulan pengalaman pengeluaran besar-besaran pasca pemprosesan barisan melalui barisan lorong 2D. Satu baris ialah barisan lorong BEV: hanya terdapat sebilangan kecil tenaga kerja (sebenarnya hanya 1-2 tenaga kerja), memfokuskan pada reka bentuk model baris lorong BEV dan pengalaman model terkumpul. Sudah terdapat banyak rangkaian penanda lorong BEV Saya akan siarkan dua kertas kerja yang memberi impak yang lebih besar kepada kami di sini untuk rujukan anda. "HDMapNet: Rangka Kerja Pembinaan dan Penilaian Peta HD Dalam Talian" dan "MapTR: Pemodelan Berstruktur dan Pembelajaran untuk Pembinaan Peta HD Vektor Dalam Talian"
Rajah 2: HDMapNet
tely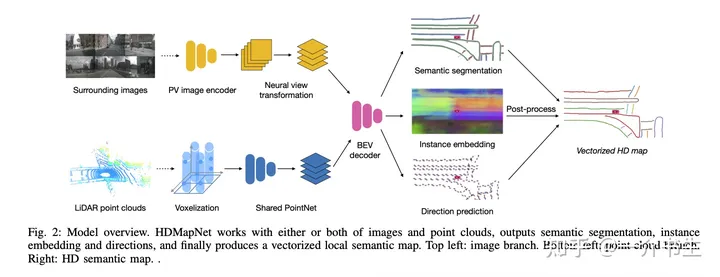
Walau bagaimanapun, cerita selalunya mempunyai liku-liku Kami hanya boleh menggunakan peta berketepatan tinggi berkelajuan tinggi untuk menghasilkan data garisan lorong. Apa yang perlu dilakukan tentang bandar ini? Masih banyak kes buruk yang perlu diselesaikan. Pada masa ini, orang penting akhirnya akan muncul. Mari kita panggil dia Rakan Sekelas Xiaotang (pengurus besar kumpulan data kita). Xiaotang dan yang lain menggunakan pembinaan semula awan titik untuk membina semula klip untuk kami (Proses ini agak menyakitkan. Saya ingat dua bulan itu adalah masa yang paling tertekan bagi mereka, haha. Sudah tentu, saya dan Xiaotang sering jatuh cinta dan membunuh masing-masing Lagipun, saya sering mengatakan bahawa tiada data lagi semasa mesyuarat ). Kemudian bagaimana untuk melabel selepas pembinaan semula. Melihat kepada pembekal pada masa itu, tiada seorang pun daripada mereka mempunyai alat pelabelan sedemikian, apatah lagi pengalaman pelabelan. Bersama Xiaotang dan yang lain, selepas sebulan yang panjang, alat anotasi akhirnya digilap dengan pembekal. (Kami sering bergurau bahawa kami memperkasakan keseluruhan industri anotasi memandu sendiri. Proses ini benar-benar menyakitkan, dan membina semula klip benar-benar lambat untuk dimuatkan). Walau bagaimanapun, keseluruhan pelabelan masih agak perlahan atau mahal Pada masa ini, Xiaoxuan membuat penampilan sulungnya dengan model besar pra-pelabelan garis lorong (kesan model besar pra-pelabelan garis lorong masih cemerlang), dan semua orang. memandangnya dengan penuh kehairanan. Selepas set gabungan ini, pengeluaran data baris lorong kami akhirnya hampir siap. Pada bulan Ogos, garisan lorong kawalan laluan BEV kami telah diulang dengan baik, yang sesuai untuk fungsi pemanduan berkelajuan tinggi yang ringkas. Kini Xiaoxuan masih memberikan kami lebih banyak kejutan ke arah model besar yang telah ditanda kami dan Xiaotang masih bercinta dan membunuh antara satu sama lain.
Walau bagaimanapun, tiada cerita berakhir dengan begitu mudah Pada bulan September, kami mula mengusahakan model pra-gabungan berbilang modal (Lidar, kamera, Radar) dan berbilang tugas (garisan lorong, halangan, Occ), dan seterusnya akan menyokong Navigasi bandar. Kuasa (NCP) adalah penyelesaian yang dipanggil yang menekankan persepsi dan mengabaikan peta. Berdasarkan pengalaman halangan BEV dan laluan lorong BEV, kami akan menggunakan rangkaian tertumpu pada kenderaan tidak lama lagi, mungkin menjelang akhir September. Banyak subtugas juga telah ditambahkan pada garisan lorong, seperti pengecaman tanda jalan, topologi persimpangan, dsb. Dalam proses ini, kami menaik taraf pasca pemprosesan garis lorong BEV, meninggalkan pemasangan spline padu garis lorong dan menggunakan skema penjejakan titik Keluaran skema penjejakan titik dan model garis lorong kami boleh menjadi gabungan yang baik. Proses ini juga menyakitkan. Kami mengadakan mesyuarat khas sekali seminggu selama 2 bulan berturut-turut. Lagipun, kami telah melakukan dengan baik berdasarkan rancangan yang sesuai, tetapi untuk mencapai had yang lebih tinggi, kami hanya boleh mengalami kesakitan dan kebahagiaan. Akhirnya, kami telah meletakkan fungsi asas ke dalam ujian jalan raya.
Biar saya terangkan secara ringkas Gambar 4 kepada anda Bahagian kiri adalah kesan penjejakan titik garisan pada masa ini, julat persepsi model kami hanya 80 meter yang pertama. yang ditinggalkan oleh penjejakan. Di sebelah kanan ialah peta persepsi masa nyata yang kami sediakan. Sudah tentu, ia masih dalam proses lelaran yang pantas, dan masih terdapat banyak masalah yang sedang diselesaikan.
24 adalah permulaan baru
Berdiri dalam 24 tahun, saya melihat kembali pertumbuhan dan pengumpulan kami dari 21 hingga sekarang Saya juga sangat bertuah kerana mempunyai sekumpulan orang yang berfikiran sama melengkapi antara satu sama lain. Dalam tempoh 24 tahun, terdapat banyak perkara yang perlu kami kejar, termasuk pengeluaran besar-besaran model pra-gabungan, usaha ke arah data, penerokaan model pemasaan, imaginasi hujung ke hujung, dsb.
Atas ialah kandungan terperinci Sedikit tentang pelaksanaan garis lorong BEV. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Ringkasan sumber set data sumber terbuka untuk pemanduan autonomi
- Anda boleh meragui keselamatan pemanduan autonomi, tetapi data besar memberitahu anda: ia memandu lebih baik daripada anda
- Bagaimana untuk menggunakan bahasa Go untuk pembangunan pemanduan autonomi?
- Penyelesaian Gabungan BEV LV Baharu: Angkat-Hadiri-Percikan Melampaui BEVFusion