
Rumah >Peranti teknologi >AI >MapNeXt berasaskan awan dan berasaskan kereta sudah selesai! Pembinaan peta berketepatan tinggi dalam talian generasi akan datang
MapNeXt berasaskan awan dan berasaskan kereta sudah selesai! Pembinaan peta berketepatan tinggi dalam talian generasi akan datang

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2024-01-31 18:06:11949semak imbas
Ditulis di atas & pemahaman peribadi pengarang
Dalam Mobiliti Kolaboratif, Terhubung dan Automatik (CCAM), semakin kuat keupayaan kenderaan pemanduan pintar untuk melihat, memodelkan dan menganalisis persekitaran sekeliling, semakin sedar dan mampu mereka Memahami, membuat keputusan, dan melaksanakan senario pemanduan yang kompleks dengan selamat dan cekap. Peta berketepatan tinggi (HD) mewakili persekitaran jalan raya dengan ketepatan paras sentimeter dan maklumat semantik peringkat lorong, menjadikannya komponen teras sistem mobiliti pintar dan pemboleh utama teknologi CCAM. Peta ini menyediakan kenderaan automatik dengan kelebihan hebat dalam memahami persekitaran mereka. Peta HD juga dianggap sebagai sensor tersembunyi atau maya kerana ia menggabungkan pengetahuan daripada sensor fizikal (peta), iaitu lidar, kamera, GPS dan IMU, untuk membina model persekitaran jalan raya. Peta HD berkembang pesat ke arah perwakilan holistik infrastruktur digital bandar pintar, termasuk bukan sahaja geometri jalan raya dan maklumat semantik, tetapi juga kemas kini tentang persepsi masa nyata peserta jalan raya, keadaan cuaca, zon kerja dan kejadian. Penggunaan skala besar kenderaan autonomi memerlukan pembinaan dan penyelenggaraan peta ini oleh kumpulan besar kenderaan yang bekerjasama untuk mengemas kini peta secara berterusan supaya kenderaan autonomi dalam armada boleh berfungsi dengan baik. Kertas kerja ini menyediakan ulasan yang meluas tentang pelbagai aplikasi peta ini dalam sistem pemanduan sangat automatik (AD). Kami secara sistematik menyemak kemajuan terkini dalam kaedah dan algoritma yang berbeza untuk membina dan mengekalkan peta berketepatan tinggi. Keperluan data, komunikasi dan infrastruktur untuk pengedaran peta HD juga dibincangkan dan disintesis. Akhir sekali, cabaran semasa dikaji semula dan hala tuju penyelidikan masa depan untuk sistem pemetaan digital generasi akan datang dibincangkan.
Sejarah Pembangunan Peta HD
A. Peta Digital
Kemunculan sistem satelit moden dan teknologi imejan telah merevolusikan penciptaan perwakilan digital yang tepat dan terperinci yang kita panggil dunia sekarang, yang menghasilkan Peta digital seperti Peta Google, OpenStreetMap, Peta Apple, Garmin dan Mapbox. Peta digital mengekod struktur jalan dan maklumat semantik asas serta tempat menarik (POI). Terdapat beberapa kaedah dan teknik untuk mengekstrak dan mengenal pasti ciri geografi yang diperlukan untuk membina peta ini daripada imejan satelit. Peta digital kini merupakan alat penting dalam kehidupan seharian kita, terutamanya apabila disepadukan dengan GPS. Malah, penyepaduan ini telah menjadi komponen teras dalam membina sejumlah besar perkhidmatan digital, yang paling penting navigasi dan penghalaan. Dibangunkan terutamanya untuk membantu manusia, peta ini kini tersedia dalam kenderaan terkini untuk membantu pemandu manusia. Walau bagaimanapun, peta ini terhad dalam ketepatan dan ketepatannya serta masa kemas kini yang diperlukan oleh AD, di mana kenderaan memerlukan tahap ketepatan lokasi tertentu serta maklumat peringkat lorong yang terperinci.
B. Peta Digital Dipertingkatkan
Peta digital telah dipertingkatkan dengan ketara untuk memenuhi keperluan ciri Sistem Bantuan Pemandu Lanjutan (ADAS) seperti Bantuan Kekal Lorong dan Kawalan Pelayaran Adaptif (ACC). Ciri biasa dalam peta digital yang dipertingkatkan ini termasuk had laju, kelengkungan dan kecerunan jalan, maklumat lorong dan tanda lalu lintas serta lampu isyarat. Peta digital yang dipertingkatkan, juga dikenali sebagai peta ADAS, kini merupakan sebahagian daripada kebanyakan kenderaan moden, yang membolehkan kefungsian ADAS. Walaupun peta digital yang dipertingkatkan memperkenalkan maklumat peringkat lorong, ketepatan geometri dan tahap perincian semantiknya mengehadkan kebolehgunaannya pada tahap autonomi yang lebih tinggi. Dalam sistem AD, kenderaan dikehendaki meletakkan diri mereka dengan ketepatan tinggi berbanding persekitarannya, memahami situasi semasa dan merancang trajektori tanpa perlanggaran. Untuk mencapai tahap autonomi ini, kenderaan automatik perlu memperoleh bukan sahaja peta dengan ketepatan kedudukan peringkat sentimeter dan maklumat geometri peringkat lorong, tetapi juga model persekitaran 3D, dengan semua ciri statik dan dinamik persekitaran jalan raya.
C. Peta berketepatan tinggi
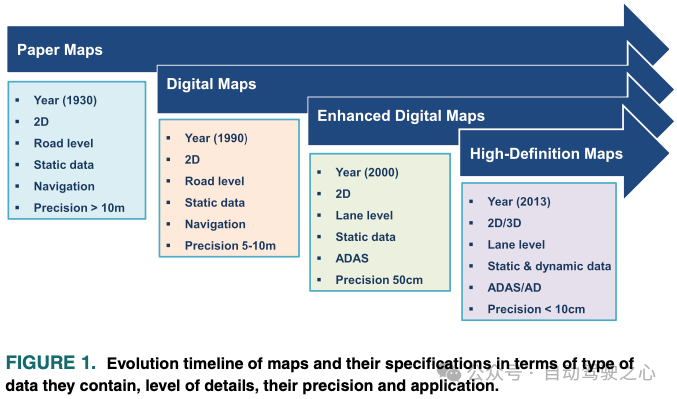
Perlu menjana peta berketepatan tinggi, atau peta berketepatan tinggi, untuk memenuhi keperluan di atas. Rajah 1 menggambarkan evolusi, ciri dan kegunaan peta, serta maklumat, ketepatan dan tahap butiran yang terkandung.
D. Peta Boleh Skala: Gambaran Keseluruhan
Sepanjang dekad yang lalu, kedua-dua ahli akademik dan industri telah menolak had peta definisi tinggi untuk menjadi mampu milik, mengekalkan diri dan berskala melalui usaha penyelidikan dan pembangunan secara besar-besaran . Walau bagaimanapun, masih terdapat beberapa isu yang tidak dapat diselesaikan dalam membina peta HD mengikut skala yang menghalang potensi penuh dan matlamat akhir peta HD dalam mendayakan mobiliti autonomi. Cabaran ini boleh dibahagikan kepada kategori berikut.
- 1) Pengumpulan data: Pengumpulan data untuk peta HD boleh menjadi proses yang memakan masa dan intensif buruh. Ia biasanya melibatkan penggunaan gabungan penderia seperti GPS, IMU, lidar dan kamera untuk mengumpul maklumat terperinci tentang alam sekitar.
- 2) Komunikasi data: Komunikasi data termasuk menghantar data peta dari tempat pengumpulan ke tempat pemprosesan untuk membina peta berketepatan tinggi, dan akhirnya ke tempat penggunaan, seperti kereta pandu sendiri. Kenderaan pemetaan menjana sejumlah besar data daripada penderia yang berbeza, yang perlu diproses untuk membina dan mengemas kini peta. Memproses data ini daripada sejumlah besar kenderaan pemetaan dalam masa nyata sememangnya satu cabaran.
- 3) Pemprosesan data: Pemprosesan data ialah langkah mencipta peta berketepatan tinggi dengan mengekstrak elemen dan ciri yang diperlukan untuk membina peta berketepatan tinggi. Ini boleh menjadi tugas yang sangat kompleks, terutamanya untuk peta besar, kerana ia melibatkan pengagregatan dan penjajaran data daripada berbilang sumber dan memastikan peta itu tepat dan terkini. Di mana sejumlah besar kenderaan pemetaan terlibat dalam proses pemetaan, penyegerakan masa yang tepat mesti dipastikan untuk mengelakkan salah jajaran data. Penyegerakan menggunakan isyarat denyutan sesaat (PPS) yang dijana GPS cenderung menjadi kaedah yang paling biasa untuk menyegerakkan semua penderia onboard.
- 4) Penyelenggaraan peta: Penyelenggaraan peta merujuk kepada proses mengemas kini peta berketepatan tinggi secara berterusan berdasarkan perubahan dalam persekitaran jalan, seperti tapak pembinaan, sekatan jalan dan pengubahsuaian pada sambungan jalan. Memandangkan persekitaran jalan raya sangat dinamik dan tertakluk kepada perubahan, proses ini memerlukan usaha pengumpulan dan pemprosesan data yang kerap.
- 5) Privasi dan Keselamatan Data: Keselamatan dan privasi data adalah penting kepada peta HD kerana ia selalunya mengandungi maklumat sensitif seperti lokasi bangunan dan infrastruktur. Memastikan data ini dilindungi dan tidak disalahgunakan adalah cabaran utama.
- 6) Kos pemetaan: Dalam proses mencipta peta berketepatan tinggi, kos peta merupakan faktor penting. Pemetaan berskala besar memerlukan penggunaan sejumlah besar kenderaan pemetaan, masing-masing dilengkapi dengan set peralatan pemetaan mahal dengan penderia ketepatan tinggi. Kos ini menjadi penting apabila memetakan kawasan yang besar. Pemetaan ketepatan tinggi boleh dilakukan menggunakan penderia gred pengguna, tetapi ini dilakukan dengan mengorbankan penggunaan algoritma pemetaan yang kompleks.
E.Sumbangan Utama
Kertas kerja ini memberikan gambaran keseluruhan yang mendalam tentang peta HD, termasuk model bersatu bagi seni bina berlapisnya. Pada masa yang sama, kepentingan peta berketepatan tinggi dalam sistem AD modular ditekankan, dan penggunaannya dalam pelbagai fungsi teras AD disintesis. Artikel ini menyediakan tinjauan menyeluruh tentang cabaran dalam pengumpulan data peta, komunikasi, pemprosesan, keselamatan dan kos, termasuk penyelesaian kos efektif dan keperluan data komunikasi dan peta dari generasi ke pengedaran. Selain itu, cabaran semasa dalam membina dan menyelenggara peta HD dibincangkan. Akhir sekali, beberapa inspirasi disediakan untuk peta ketepatan tinggi mudah alih masa hadapan dan generasi akan datang. Untuk meringkaskan sumbangan utama:
- Tinjauan kendiri peta HD sebagai konteks untuk komuniti sistem pengangkutan pintar yang lebih luas.
- Semakan terperinci tentang teknologi paling canggih yang digunakan oleh peta HD dalam pelbagai fungsi teras sistem AD.
- Tinjauan komprehensif tentang kaedah, kaedah dan algoritma yang berbeza untuk mengekalkan peta HD pada tahap yang berbeza dan memastikannya dikemas kini.
- Bincangkan cabaran utama dan prospek masa depan peta HD dalam pentadbiran bersepadu dan seterusnya.
Peta HD: Gambaran Keseluruhan
Peta HD awal hanyalah lanjutan daripada peta digital dipertingkat yang digunakan dalam ADAS, ia dipanggil peta awal. Istilah Peta HD baru sahaja muncul, tetapi kini diterima secara meluas oleh industri CCAM, termasuk syarikat automotif Tahap 1, pembekal peta dan OEM. Peta HD merangkum semua maklumat yang diperlukan untuk kenderaan automatik untuk memahami persekitaran pemanduan dengan ketepatan yang sangat tinggi. Walaupun secara umum diterima bahawa peta HD adalah pemboleh teras CCAM, tidak ada garis panduan atau piawaian yang jelas untuk maklumat yang membentuk peta HD dan cara untuk mewakili maklumat ini. Walau bagaimanapun, peta HD tersedia di pasaran berkongsi ciri biasa. Ketepatan kedudukan aras sentimeter dan ketersediaan maklumat geometri dan semantik aras lorong adalah ciri penting dalam kebanyakan peta HD. Pada tahap paling asasnya, peta HD boleh menjadi satu set titik dan segmen garisan yang lokasi tepatnya mewakili tanda jalan, penanda lorong, sempadan lorong dan pemisah lorong. Disebabkan oleh keperluan sistem AD, peta berketepatan tinggi hari ini menjadi semakin kompleks, dan data daripada sumber yang berbeza membentuk berbilang lapisan maklumat tentang persekitaran pemanduan. Pecah peta HD kepada berbilang lapisan membolehkan perwakilan data yang lebih berstruktur bagi persekitaran jalan. Ini memudahkan kebolehcapaian komponen sistem AD yang berbeza, yang memerlukan persekitaran dimodelkan pada tahap perincian yang berbeza. Selain itu, perwakilan data hierarki memudahkan pembinaan, penyimpanan, pengambilan dan penyelenggaraan peta. Contoh lapisan ini diberikan dalam Rajah 2.
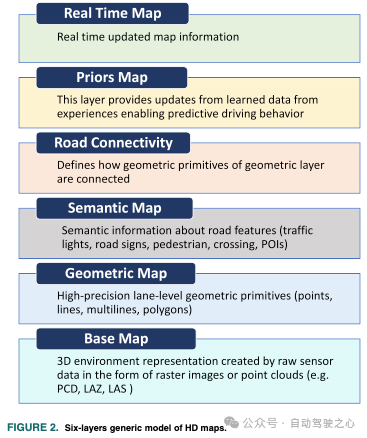
Seperti yang dinyatakan di atas, terdapat beberapa cara untuk mewakili maklumat peta yang digunakan dalam sistem AD, termasuk butiran peringkat lorong seperti sempadan lorong, jenis penanda lorong, arah trafik, lintasan pejalan kaki, poligon kawasan boleh dipandu dan anotasi persimpangan. Walaupun persekitaran pemanduan sangat dinamik, data yang diwakili dalam tiga lapisan ini adalah statik. Perwakilan keseluruhan alam sekitar juga harus termasuk maklumat trafik masa nyata mengenai kelajuan yang diperhatikan, keadaan cuaca, kawasan kesesakan, kawasan penghalang jalan (pembinaan), dsb. Bahagian ini cuba memberikan gambaran keseluruhan global tentang maklumat yang disimpan dalam lapisan ini dengan cara yang bersatu. Walaupun kebanyakan penyedia peta HD mempunyai takrifan dan format mereka sendiri, dan tiada standard tunggal untuk peta HD, kami membahagikan maklumat yang terkandung dalam peta HD kepada enam lapisan berbeza, seperti yang ditunjukkan dalam Rajah 2.
A. Lapisan Peta Asas
Lapisan peta asas ialah asas peta HD dan dianggap sebagai lapisan rujukan dari mana semua lapisan lain dibina. Ia mengandungi perwakilan geospatial tiga dimensi yang sangat tepat bagi persekitaran, seperti lokasi dan bentuk jalan, bangunan dan struktur lain. Model geospatial tiga dimensi persekitaran jalan menjadi sumber maklumat penting untuk kenderaan autonomi. Hari ini, peta HD selalunya mengandungi perwakilan tiga dimensi persekitaran. Lapisan peta asas biasanya dibuat menggunakan awan titik daripada lidar dan/atau imej daripada satu atau lebih kamera, kadangkala dengan bantuan GPS/IMU. Suite penderia ini membentuk MMS yang menghasilkan awan titik 3D yang sangat tepat dan terperinci yang mewakili persekitaran. Ciri geometri dan semantik jalan dan lorong diekstrak daripada lapisan ini untuk membina lapisan lain dalam peta HD. Oleh kerana lapisan ini mengandungi perwakilan data padat persekitaran, ia memainkan peranan penting dalam penyetempatan tepat kenderaan autonomi. Beberapa teknik untuk pendaftaran awan titik membolehkan pose kenderaan dianggarkan dengan memadankan data sensor mentah dengan awan titik lapisan tersebut. Membina dan mengemas kini lapisan ini adalah mencabar dari segi pemprosesan data dan keperluan komunikasi.
B. Lapisan Peta Geometri
Walaupun lapisan peta asas memberikan gambaran persekitaran yang tepat dan padat, keupayaannya untuk menyokong pemahaman tentang alam sekitar adalah terhad kerana kekurangan ciri yang bermakna dalam perwakilannya. Lapisan geometri dalam peta HD memberikan maklumat terperinci tentang geometri persekitaran jalan, termasuk lokasi dan bentuk jalan, lorong, sekatan jalan dan ciri lain. Lapisan geometri biasanya merangkumi maklumat tentang lebar jalan, bilangan lorong, garis tengah setiap lorong, sempadan lorong di setiap jalan dan ketinggian permukaan jalan. Ia juga termasuk maklumat mengenai lokasi dan bentuk tepat sekatan, kaki lima, pejalan kaki, dan tanda lalu lintas menegak dan mendatar. Setiap ciri ini diwakili oleh primitif geometri asas, iaitu titik, garis, poligaris, dan poligon. Sebagai contoh, lokasi tanda trafik menegak boleh diwakili oleh titik. Garis tengah atau sempadan lorong boleh diwakili oleh satu set segmen garisan yang saling berkaitan, seperti garis poli. Begitu juga, lintasan boleh diwakili oleh poligon. Ciri geometri lapisan ini dicipta dengan memproses data daripada lapisan peta asas. Membina lapisan geometri daripada data peta asas biasanya melibatkan beberapa langkah pemprosesan, termasuk pembahagian jalan, pengekstrakan maklumat lorong, papan tanda jalan, tiang, tanda lalu lintas, sekatan, halangan dan ciri turapan. Lapisan ini menyediakan perwakilan geometri peringkat lorong yang sangat tepat bagi ciri jalan. Ciri geometri dalam peta HD adalah penting untuk pelbagai komponen teras AD, yang paling penting ramalan gerakan tepat peserta jalan raya dinamik, dan perancangan selamat bagi trajektori yang boleh dilaksanakan secara geometri.
C. Lapisan Peta Semantik
Lapisan peta semantik mentakrifkan kepentingan ciri jalan yang disediakan oleh lapisan peta geometri. Data dalam lapisan ini memberikan konteks dan makna kepada ciri yang diwakili dalam peta. Sebagai contoh, lapisan peta semantik dalam peta HD mengandungi maklumat seperti jenis jalan raya (cth., lebuh raya, jalan kediaman) dan lorong (cth., mungkin bertukar ke kiri atau kanan), nombor mereka, arah trafik dan sama ada lorong itu digunakan untuk membelok atau untuk membelok Maklumat tentang tempat letak kereta. Ia juga termasuk maklumat tentang had laju, sempadan lorong, persimpangan, persimpangan jalan, tanda lalu lintas, lampu isyarat, tempat letak kereta, perhentian bas dan banyak lagi ciri lain yang penting untuk membina perwakilan kontekstual persekitaran. Lapisan peta semantik membolehkan kenderaan autonomi membina perwakilan situasi terperinci tentang persekitaran mereka dan memahami peraturan lalu lintas, membolehkan mereka membuat keputusan yang betul dan selamat dalam senario trafik yang berbeza. Ringkasnya, lapisan peta semantik memberikan label semantik kepada ciri jalan dan objek yang ditakrifkan dalam peta geometri. Sebagai contoh, titik dalam lapisan geometri tidak lebih daripada satu set koordinat tersusun dalam sistem rujukan koordinat peta. Hanya lapisan semantik yang menentukan sama ada titik itu sepadan dengan lampu isyarat, tanda hasil atau tanda berhenti. Seperti yang kita sedia maklum, peta berketepatan tinggi mengandungi maklumat semantik yang kaya. Lapisan semantik juga mengaitkan metadata dengan ciri jalan seperti kelengkungan jalan, kelajuan pemanduan yang disyorkan dan pengecam unik untuk setiap ciri semantik. Malah, peta HD yang kaya dengan semantik membolehkan kereta pandu sendiri memahami situasi pemanduan dengan lebih baik dan membuat keputusan yang rumit dalam senario yang rumit. Walau bagaimanapun, membina graf semantik persekitaran jalan yang boleh dipercayai dan ketepatan tinggi bukanlah satu proses yang mudah. Beberapa langkah pemprosesan diperlukan, tidak terhad kepada pembahagian pemandangan, pengesanan objek, pengelasan, anggaran pose dan pemetaan. Dengan kemajuan terkini dalam penglihatan komputer, pembelajaran mendalam, gabungan penderia dan algoritma SLAM semantik, anda boleh membina graf semantik yang tepat.
D. Lapisan sambungan jalan
Lapisan sambungan jalan menerangkan topologi rangkaian jalan dan cara pelbagai elemen geometri disambungkan. Bertentangan dengan takrifan piawai peta digital, yang hanya mengandungi maklumat aras jalan dan sambungan aras jalan, peta HD mengandungi maklumat geometri dan semantik aras lorong, jadi sambungan antara jalan menjadi kompleks kerana ia mentakrifkan dua atau lebih set lorong. . Lebih tepat lagi, lapisan ini menyediakan susun atur dan ketersambungan jalan, termasuk sempadan lorong dan garis tengah dan persimpangan. Maklumat ketersambungan peringkat lorong diperlukan untuk merancang peralihan undang-undang antara jalan dan lorong dan untuk merancang operasi yang dibenarkan di setiap persimpangan, yang penting untuk perancangan laluan untuk kenderaan autonomi. Ringkasnya, lapisan ini mentakrifkan bagaimana primitif yang membentuk lapisan geometri disambungkan antara satu sama lain. Sambungan ini diwujudkan dengan mentakrifkan pasangan jujukan unsur geometri dan semantik. Menetapkan pengecam unik kepada setiap elemen geometri dan semantik membolehkan perwakilan maklumat ini menggunakan struktur data graf, di mana setiap elemen diwakili oleh tepi dan sambungannya sebagai nod. Struktur grafik membolehkan pertanyaan pantas dan carian peta serta perancangan laluan yang cekap.
E. Lapisan peta sebelumnya
Lapisan ini juga dipanggil lapisan peta sebelumnya kerana ia mewakili dan mempelajari maklumat daripada pengalaman lalu. Ia melibatkan unsur geometri dan semantik dalam peta yang keadaannya berubah mengikut masa. Mempelajari aliran trafik dan status kawasan kemalangan daripada data armada membolehkan tingkah laku pemanduan yang lebih cekap dan ramalan. Lapisan ini juga memperoleh dan mempelajari maklumat yang membantu meramalkan tingkah laku pemanduan manusia dan keadaan dinamik lampu isyarat di persimpangan. Ia juga menyesuaikan diri dengan tetapan jalan sementara seperti pesanan tempat letak kereta, penghunian dan jadual waktu. Contohnya, tempat letak kereta di jalanan di sesetengah bandar berubah pada hari bekerja tertentu, kebarangkalian penghunian diramalkan dan peraturan masa yang mengawal tempat letak kereta yang diberikan diperoleh daripada bacaan penderia lapisan peta sebelumnya bagi kenderaan armada yang berbeza yang melalui tempat letak kereta itu . Mempelajari dan meramalkan tingkah laku pemanduan pemandu jalan raya boleh menjadi mencabar kerana perbezaan sosiobudaya antara masyarakat yang berbeza. Memodelkan tingkah laku ini secara empirik adalah penting untuk sistem AD yang umum dan boleh skala.
F. Data peta masa nyata
Lapisan masa nyata dalam peta HD ialah lapisan dinamik yang menyediakan maklumat masa nyata tentang persekitaran, seperti keadaan lalu lintas, penutupan jalan dan peristiwa lain yang mungkin menjejaskan kenderaan autonomi navigasi. Lapisan ini biasanya dibuat dengan menggabungkan data daripada pelbagai sumber, seperti kamera, penderia dan peranti bersambung lain yang dipasang pada kenderaan atau terletak di tepi jalan. Melalui penyumberan ramai kenderaan yang mengambil bahagian atau infrastruktur pintar menggunakan rangkaian komunikasi tertentu, data dikumpul dalam masa nyata dan digunakan untuk mengemas kini peta berketepatan tinggi. Lapisan masa nyata boleh merangkumi maklumat seperti lokasi dan kelajuan kenderaan lain, lokasi dan status isyarat lalu lintas, dan kehadiran zon pembinaan atau halangan dan sekatan lain di jalan raya. Maklumat ini penting untuk kenderaan autonomi untuk membuat keputusan pemanduan yang selamat dan cekap dalam masa nyata untuk mengoptimumkan aliran trafik dan mengurangkan kesesakan. Selain itu, lapisan masa nyata boleh digunakan untuk meningkatkan ketepatan dan kesempurnaan peta HD dengan menyediakan maklumat terkini tentang persekitaran yang mungkin tidak ditangkap oleh penderia yang digunakan untuk mencipta peta. Ringkasnya, lapisan masa nyata dalam peta HD menyediakan perwakilan persekitaran yang dinamik dan terkini. Pengemaskinian masa nyata peta HD dengan elemen dinamik adalah mencabar dan memerlukan infrastruktur komunikasi pintar yang kompleks dan kerjasama di kalangan berbilang aktor. Penghantaran data antara sistem pengangkutan pintar (ITS), penyedia peta HD dan kenderaan mestilah boleh dipercayai dan memenuhi keperluan tertentu yang diterangkan kemudian dalam tinjauan ini.
Peta berketepatan tinggi dalam seni bina sistem pemanduan autonomi
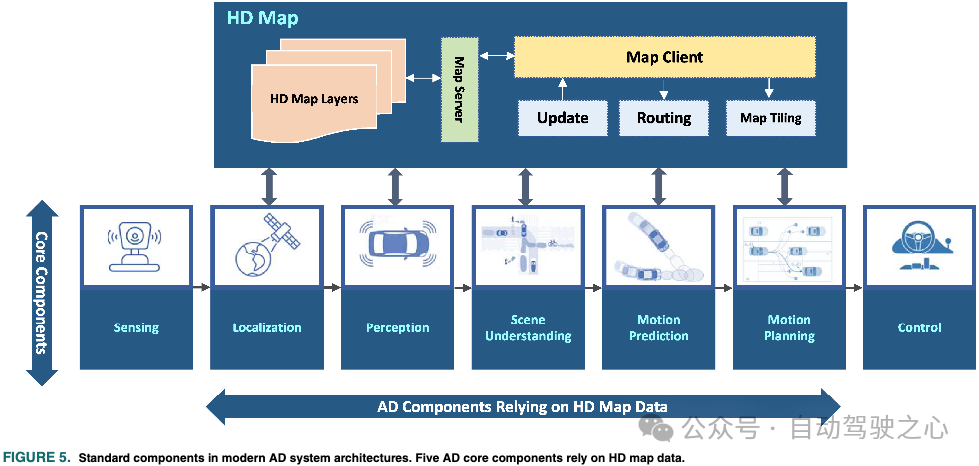
Peta berketepatan tinggi menyediakan sistem AD dengan gambaran persekitaran jalan yang terperinci dan tepat. Peta ini mengandungi maklumat geometri, topologi dan semantik peringkat lorong yang diperlukan untuk navigasi kenderaan autonomi yang selamat dan cekap. Penggunaan peta HD dalam kereta pandu sendiri membolehkan mereka lebih memahami persekitaran mereka, merancang laluan dan membuat keputusan pemanduan yang lebih tepat untuk memastikan keselamatan penumpang dan pengguna jalan raya yang lain. Bahagian ini membincangkan kepentingan dan penggunaan peta berketepatan tinggi dalam sistem AD. Data peta ultra-ketepatan kini merupakan sebahagian daripada kebanyakan komponen teras yang berbeza dalam sistem AD. Untuk membincangkan kepentingan dan penggunaan peta HD dalam AD, kami memperkenalkan secara ringkas seni bina dan komponen standard sistem AD moden yang tipikal. Rajah 5 menunjukkan komponen standard sistem AD, menunjukkan komponen yang bergantung pada peta HD. Bahagian ini bermula dengan pengenalan ringkas kepada seni bina sistem AD, cara ia berfungsi, dan pelbagai komponennya. Baki bahagian ini menyediakan semakan yang meluas tentang keadaan seni dalam komponen AD yang bergantung pada peta HD.
A. Seni Bina Sistem Pemanduan Autonomi
Kenderaan automatik ialah sistem fizikal siber yang kompleks di mana komponen berbeza mesti bekerjasama untuk menyelesaikan tugas pemanduan keseluruhan dengan cara yang mantap, boleh dipercayai dan selamat. Walaupun tiada seni bina unik untuk sistem AD, kami bergantung pada seni bina biasa dalam kerja ini yang membantu kami memahami cara peta HD boleh digunakan untuk meningkatkan fungsi sistem AD yang berbeza. Sama seperti mana-mana sistem robotik, kenderaan autonomi boleh dilihat sebagai agen kognitif dengan tiga komponen utama, (1) penderia, (2) persepsi, dan (3) tingkah laku. Pecah elemen ini kepada sistem AD gred industri menghasilkan beberapa komponen, seperti yang ditunjukkan dalam Rajah 5. Komponen penderiaan dalam seni bina sistem AD moden biasanya termasuk penderia yang berbeza seperti IMU, GPS, kamera, lidar dan radar. Subset penderia ini membolehkan kenderaan mengetahui kedudukannya berbanding dengan persekitaran, iaitu untuk penyetempatan, dan penderia yang selebihnya digunakan untuk mengesan persekitaran itu sendiri. Peranan komponen penderiaan adalah untuk membaca dan memproses data sensor mentah dan menyediakannya ke bahagian lain sistem AD. Dalam bentuk yang paling mudah, komponen penderiaan terdiri daripada satu set pemacu penderia yang membaca data penderia mentah dalam masa nyata. Komponen penentududukan adalah salah satu komponen paling kritikal untuk operasi yang boleh dipercayai bagi keseluruhan sistem AD. Tujuannya adalah untuk menganggarkan kedudukan kenderaan dengan tepat. Ralat setempat disebarkan ke seluruh saluran paip pemprosesan AD. Penyetempatan hanyalah penganggar keadaan yang menggabungkan data sensor mentah daripada komponen penderiaan. Tambahan pula, ketersediaan peta membolehkan penyetempatan yang lebih baik dan mantap, terutamanya di kawasan di mana sesetengah penderia gagal atau mengalami penurunan prestasi. Peranan persepsi adalah untuk menjana perwakilan peringkat pertengahan keadaan persekitaran semasa, termasuk maklumat tentang halangan dan faktor jalan raya. Perwakilan ini juga termasuk butiran tentang lorong (lokasi, sempadan, tanda dan jenis), tanda lalu lintas, lampu isyarat dan kawasan boleh dipandu. Penglihatan komputer dan teknik pembelajaran mendalam digunakan secara meluas untuk tugasan segmentasi, pengelompokan dan pengelasan. Selain itu, gabungan peringkat sasaran juga merupakan bahagian penting dalam komponen ini. Output persepsi ialah senarai objek yang dijejaki dan pembahagian semantik imej untuk pemahaman adegan. Maklumat geometri dan semantik daripada peta HD juga boleh digunakan untuk meningkatkan pengesanan dan gabungan objek. Persepsi yang tepat adalah penting untuk keselamatan, kerana kesilapan persepsi boleh menjejaskan kualiti maklumat yang digunakan oleh keseluruhan sistem AD. Oleh itu, menggunakan sumber data sensor berlebihan boleh meningkatkan keyakinan terhadap ketepatan persepsi, seterusnya meningkatkan keteguhan keseluruhan sistem. Komponen pemahaman adegan ialah jambatan antara komponen persepsi dalam sistem AD dan perwakilan keadaan peringkat pertengahan abstrak bagi persekitaran yang diberikan oleh komponen kognitif peringkat tinggi. Komponen ini bertujuan untuk menyediakan tahap pemahaman kontekstual yang lebih tinggi tentang senario pemanduan dengan membina peta ketepatan tinggi dan data yang disediakan oleh komponen persepsi. Kemudian dalam bahagian ini, kita membincangkan cara kedua-dua sumber maklumat ini boleh digabungkan untuk membina perwakilan adegan untuk memahami persekitaran pemanduan. Komponen lain dalam saluran paip AD yang bergantung pada peta HD ialah komponen ramalan gerakan. Ia membina perwakilan spatiotemporal peringkat tinggi persekitaran yang disediakan oleh pemahaman adegan untuk meramalkan tingkah laku ejen jalan di sekeliling kenderaan. Peranan peta HD dalam ramalan gerakan adalah untuk menyediakan trajektori sebelumnya bagi setiap ejen jalan di tempat kejadian. Ramalan gerakan ialah masalah yang sangat multimodal di mana peta HD memainkan peranan penting, yang dibincangkan secara terperinci dalam bahagian ini. Komponen perancangan gerakan direka untuk mengira trajektori yang boleh dilaksanakan, bebas perlanggaran dan selamat untuk kenderaan autonomi. Ini dicapai dengan mengoptimumkan laluan terpendek global yang diperoleh oleh algoritma penghalaan yang berjalan pada data peta HD dan trajektori yang diramalkan bagi ejen jalan. Perancangan gerakan juga termasuk keupayaan perancangan tingkah laku yang bergantung pada keadaan pemandangan semasa yang ditakrifkan oleh objek yang dikesan dan peta HD. Unit kawalan menerima trajektori yang dirancang dan mengira arahan kawalan untuk sistem pemanduan, brek dan pecutan. Komponen kawalan tidak secara eksplisit bergantung pada data peta, jadi ia tidak akan dipertimbangkan dalam penyiasatan ini. Akhir sekali, seperti yang ditunjukkan dalam Rajah 5, komponen khas digunakan untuk melayani semua komponen lain dengan mengendalikan permintaan untuk menyediakan data peta. Data peta HD biasanya disimpan dalam pangkalan data yang disoal oleh pelayan peta (tempatan atau awan) untuk menghala, jubin dan permintaan kemas kini daripada pelanggan peta dalam kenderaan. Memandangkan elemen penghalaan memerlukan pemprosesan algoritma khas, kami akan mempertimbangkannya dalam tinjauan aplikasi peta HD dalam sistem AD.
B. Penentududukan
Komponen penentududukan dalam sistem AD direka untuk menganggarkan kedudukan dan orientasi kenderaan berbanding sistem koordinat rujukan global. Peranan utamanya adalah untuk terus mengekalkan ketepatan dan keteguhan yang tinggi dalam anggaran yang diperlukan bagi komponen berturut-turut dalam sistem. Ketepatan algoritma kedudukan menentukan kebolehpercayaan keseluruhan sistem AD. Keteguhan kedudukan dalam keadaan cuaca buruk adalah keperluan utama untuk sistem AD moden, kerana prestasi anggaran yang merosot boleh membawa kepada akibat yang teruk dan potensi kerosakan. Sepanjang dua dekad yang lalu, penyelidikan penting mengenai kedudukan telah mencapai hasil yang luar biasa, menghasilkan pelbagai kaedah. Untuk memastikan keadaan operasi biasa dan mencapai keselamatan sistem global, kenderaan autonomi perlu diletakkan dalam jarak 10 sentimeter.
C. Persepsi
Komponen persepsi dalam sistem AD sering dikaitkan dengan pemprosesan imej kamera mentah dan awan titik lidar, bukan sahaja untuk mengesan dan menjejaki objek statik (cth., tanda lalu lintas dan tanda jalan); seperti kenderaan sekeliling, pejalan kaki dan penunggang basikal. Persepsi adalah salah satu fungsi teras utama sistem AD. Memastikan kebolehpercayaan dan prestasi masa nyata adalah penting untuk memastikan navigasi bebas perlanggaran. Menggabungkan data persepsi dengan maklumat geometri dan semantik yang terperinci dan tepat yang terkandung dalam lapisan peta HD berpotensi meningkatkan persepsi dengan memfokuskan pada kawasan minat (ROI) yang paling berkaitan. Lebih tepat lagi, geometri peta HD membenarkan penentuan ROI untuk menapis awan titik, meninggalkan hanya mereka yang mempunyai minat khusus kepada fungsi persepsi, dengan itu memudahkan dan meningkatkan kecekapan pengiraan pengesanan tanpa tergesa-gesa.
D. Pemahaman Senario
Memahami persekitaran pemanduan adalah penting untuk kenderaan autonomi untuk membuat keputusan yang betul dan selamat. Salah satu motivasi awal untuk peta HD adalah untuk menyediakan kenderaan autonomi dengan maklumat yang tepat dan terperinci untuk membantu memahami persekitaran mereka. Maklumat ini membolehkan sistem AD memahami situasi pemanduan semasa dan mentafsir semua entiti yang membentuk tempat kejadian. Geometri dan semantik yang terkandung dalam peta memungkinkan untuk membina model data padat dan perwakilan persekitaran secara sistematik, membolehkan kenderaan mengendalikan senario pemanduan yang kompleks. Lebih tepat lagi, komponen pemahaman pemandangan dalam sistem AD, disokong oleh maklumat geometri dan semantik peta HD, secara konsisten boleh memberikan konteks persepsi yang bermakna. Selain pengesanan objek mentah, pemahaman pemandangan bertujuan untuk mengekstrak dan menganggarkan maklumat kritikal keselamatan dan menjadikannya tersedia untuk peringkat pemprosesan seterusnya.
E.ROUTING
Peta digital peringkat jalan membantu navigasi pemandu manusia. Pengiraan laluan dalam peta ini tidak boleh melangkaui penggunaan sambungan aras jalan kerana peta ini tidak termasuk butiran aras lorong. Laluan pemanduan yang tepat dan dioptimumkan adalah perlu untuk menjimatkan masa dan tenaga serta menggalakkan keselamatan kenderaan di seluruh dunia. Pengiraan laluan pemanduan yang cekap dan kos rendah mesti mempertimbangkan model peringkat lorong persekitaran. Tambahan pula, dalam persekitaran yang sangat dinamik, maklumat terperinci tentang status trafik dan penghunian lorong adalah penting untuk melaraskan laluan secara dinamik semasa kenderaan autonomi menavigasi persekitaran. Dengan mengambil kira maklumat peringkat lorong yang terperinci dan tepat serta lapisan apriori dan masa nyata lapisan statik peta HD, pengiraan laluan dinamik yang cekap adalah mungkin. Bagi subsistem penghalaan dalam kenderaan autonomi untuk mengira laluan boleh dipandu dari lokasi semasa ke destinasi yang ditetapkan, sistem mesti disediakan dengan peta terkini daripada pelayan peta HD, seperti yang ditunjukkan dalam Rajah 5. Sebagai alternatif, seperti peta digital, pengiraan laluan boleh disediakan sebagai perkhidmatan. Selepas kedudukan tepatnya dihantar ke pelayan peta HD, laluan optimum boleh dikira dan disalurkan semula kepada kenderaan untuk menyokong komponen teras sistem yang lain. Dalam beberapa tahun kebelakangan ini, perkhidmatan penghalaan ini telah melibatkan mengambil kira keadaan trafik masa nyata dan faktor tenaga (mis., laluan paling cekap tenaga). Untuk kenderaan autonomi, faktor lain boleh dipertimbangkan, seperti laluan yang mengelakkan persekitaran bandar kompleks yang sukar dinavigasi dengan ADS, atau laluan dengan liputan rangkaian yang baik untuk menjamin sambungan berterusan kepada perkhidmatan dalam talian, termasuk perkhidmatan peta ketepatan tinggi masa nyata.
F. Perancangan gerakan
Peranan perancangan gerakan dalam sistem AD adalah untuk menjana trajektori yang boleh dilaksanakan, selamat, bebas perlanggaran dan penjimatan tenaga. Tugas perancangan gerakan biasanya termasuk penjanaan trajektori dan perancangan tingkah laku. Perancangan tingkah laku ialah fungsi membuat keputusan lanjutan yang digunakan untuk memutuskan peralihan antara keadaan pemanduan yang berbeza, seperti pertukaran lorong, mengikut kenderaan di lorong, memperlahankan kenderaan dan tempat letak kereta, dsb. Untuk melaksanakan transformasi ini dengan selamat, perancang tingkah laku memerlukan peta tempatan dan kesedaran kenderaan untuk membina model transformasi persekitaran kenderaan. Tidak seperti navigasi dalam robot mudah alih, persekitaran jalan raya sangat berstruktur dan semua pengguna jalan raya mesti mematuhi peraturan lalu lintas. Trajektori AD yang dijana sangat diperlukan untuk memastikan pematuhan peraturan lalu lintas dan pergerakan dalam kawasan jalan yang boleh dipandu. Kaedah yang berbeza wujud untuk perancangan pergerakan kenderaan autonomi, dan semuanya bergantung sedikit sebanyak pada maklumat geometri dan semantik yang disediakan oleh peta berketepatan tinggi untuk mematuhi peraturan lalu lintas. Dalam kaedah perancangan gerakan berasaskan sampel, geometri lorong peta HD digunakan untuk menyekat ruang carian dengan menolak trajektori calon yang tidak boleh dilaksanakan.
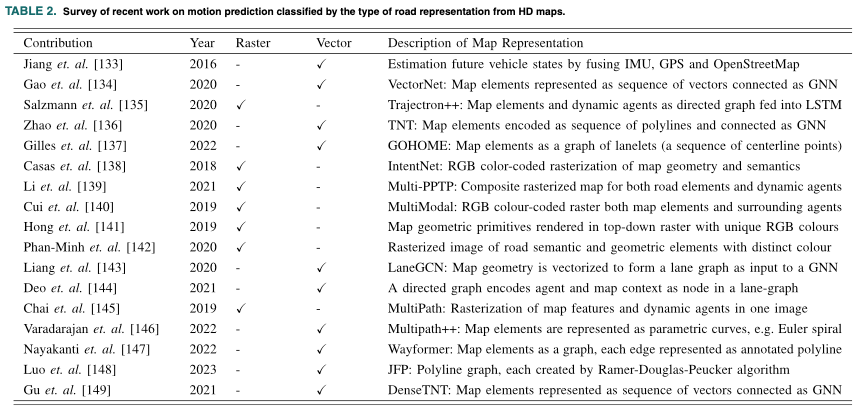
G. Ramalan Gerakan
Persekitaran pemanduan sangat dinamik dan melibatkan pelakon jalan raya yang berbeza seperti pejalan kaki, kenderaan dan penunggang basikal. Meramalkan pergerakan dan gelagat masa depan pelakon jalan raya ini adalah penting bagi kenderaan autonomi untuk membina perwakilan kontekstual persekitaran interaktif mereka, dengan itu meramalkan situasi yang berpotensi berbahaya. Dari perspektif abstrak, peserta trafik ini boleh dianggap sebagai sistem berbilang ejen yang kompleks. Malah, membangunkan penyelesaian yang boleh dipercayai untuk meramalkan pergerakan dan tingkah laku ejen jalan raya akan meningkatkan keselamatan dan keupayaan kenderaan autonomi untuk menyesuaikan diri dengan tingkah laku seperti manusia dalam keadaan trafik dunia sebenar. Meramalkan tingkah laku peserta trafik ini adalah penting untuk sistem AD dan digunakan terutamanya untuk penilaian risiko dan perancangan pergerakan yang selamat dan selesa. Ramalan gerakan merujuk kepada menganggarkan tingkah laku masa hadapan ejen jalan berdasarkan keadaan semasa mereka dan model persekitaran mereka. Pelbagai usaha penyelidikan telah menangani masalah meramal pergerakan masa depan peserta jalan raya.
H. Aplikasi pihak ketiga
Peta HD boleh memberikan data GT yang tepat dan boleh dipercayai, yang boleh digunakan sebagai rujukan untuk menentukur output sensor. Contohnya, lidar boleh ditentukur menggunakan koordinat ketepatan tinggi unsur geometri peta definisi tinggi dan diselaraskan dengan sempurna dengan IMU. Dengan membandingkan ukuran sensor dengan data peta HD, sebarang ralat atau percanggahan boleh dikenal pasti dan diperbetulkan, meningkatkan penentukuran sensor. Selain itu, peta HD boleh digunakan untuk penentukuran (kendiri) dalam talian. Ketersediaan peta HD, data penderia mentah masa nyata dan algoritma untuk melakukan perbandingan memungkinkan untuk mengira ralat antara pengukuran penderia dan GT. Oleh itu, ia membenarkan pembetulan berterusan ralat penentukuran sensor dalam masa nyata. Ini menjadikan sistem AD lebih teguh dan boleh dipercayai kepada perubahan keadaan persekitaran serta perubahan dalam prestasi penderia. Penentukuran dalam talian membolehkan penentukuran sensor yang lebih tepat dan mantap berbanding kaedah penentukuran luar talian. Baru-baru ini, peta HD juga telah digunakan untuk meningkatkan anotasi jalan untuk mencipta set data yang besar untuk pengesanan tanda tempat trafik.
Membina peta berketepatan tinggi
A. Sistem pemetaan mudah alih
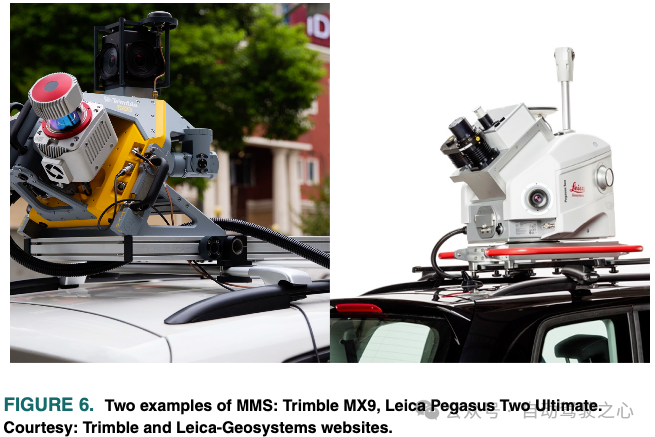
Membina peta berketepatan tinggi ialah proses kompleks yang memerlukan beberapa langkah. Langkah pertama dalam membina program pemetaan HD adalah untuk menghantar kenderaan khusus yang dilengkapi dengan set penderia yang sangat tepat dan ditentukur dengan baik untuk meninjau dan mengumpul data tentang alam sekitar. Kenderaan pemerolehan data yang digunakan untuk pemetaan mungkin dilengkapi dengan sambungan kepada perkhidmatan pembetulan dengan ketepatan kedudukan RTK (kinematik masa nyata) sehingga beberapa sentimeter atau perkhidmatan pembetulan yang membolehkan GNSS berketepatan tinggi. Pengukuran kedudukan GNSS selalunya disepadukan dengan ukuran daripada IMU (Unit Pengukuran Inersia) dan odometer roda berprestasi tinggi. Terdapat beberapa produk komersial yang mengintegrasikan GNSS dan IMU sebagai sistem navigasi inersia dalam satu unit. Kenderaan pemetaan juga dilengkapi dengan satu atau lebih lidar dan kamera resolusi tinggi untuk mengumpul data mentah 3D/2D persekitaran jalan. Terdapat dua cara untuk menyediakan alat pengumpulan data untuk pemetaan. Langkah pertama ialah membeli penderia di atas, pilih konfigurasi yang sesuai dan pasangkannya pada kenderaan. Walaupun pendekatan ini menawarkan fleksibiliti konfigurasi penderia yang telah ditetapkan, bagaimanapun, menentukur beberapa penderia berbeza kepada ketepatan yang diperlukan untuk memplot bukanlah perkara remeh dan memakan masa, terutamanya untuk kamera. Sebagai alternatif, sesetengah pengeluar menawarkan set keseluruhan penderia dalam satu pakej, dipanggil sistem pemetaan mudah alih (MMS). Contoh MMS komersial ditunjukkan dalam Rajah 6.
Penyelenggaraan Peta HD
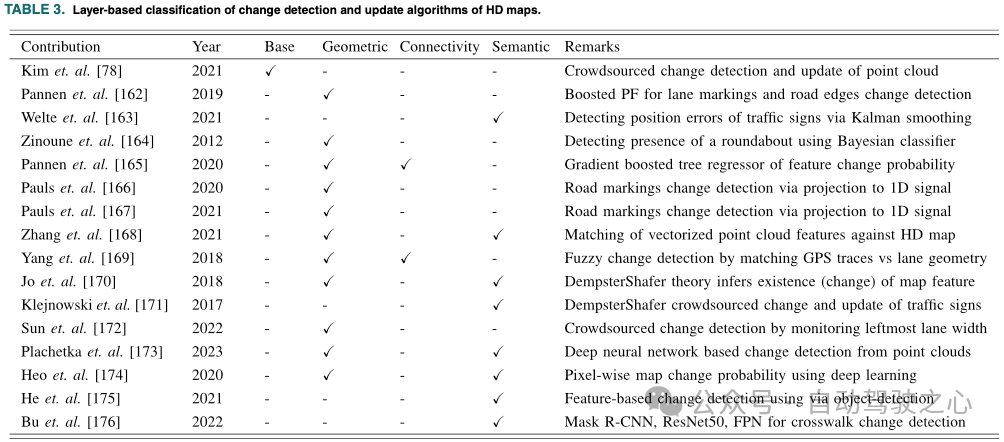
Mempunyai peta HD terkini adalah penting untuk operasi yang betul bagi pelbagai komponen teras AD. Pepijat dalam peta HD boleh menyebabkan kerosakan yang serius disebabkan oleh keputusan yang lemah yang dibuat oleh sistem. Keputusan yang salah boleh dielakkan melalui kemas kini kenderaan peta yang kerap. Persekitaran jalan raya adalah sangat dinamik dan mungkin berubah dengan kerap disebabkan pembinaan infrastruktur baharu, penyelenggaraan jalan dan perluasan lorong. Kenderaan pemetaan mesti dapat mengesan perubahan dalam persekitaran dan menghantarnya untuk mengemas kini peta. Proses kemas kini peta melibatkan langkah pemprosesan yang kompleks, termasuk memproses data daripada pelbagai sumber dan penderia pada skala yang berbeza, mengenal pasti sisihan antara peta yang disimpan dan data persekitaran yang baru dikumpul, dan akhirnya menyepadukan sisihan ini untuk mengemas kini lapisan peta yang berbeza. Beberapa kaedah dan pendekatan telah dibangunkan dalam literatur untuk menangkap perubahan dalam peta HD dan mengemas kininya. Dalam perkara berikut, kami menyemak kaedah dan kaedah yang berbeza untuk mengesan perubahan dalam peta HD dan cara maklumat ini boleh digunakan untuk mengemas kini peta. Pendekatan yang kami ikuti untuk menyiasat usaha terdahulu untuk mengekalkan peta HD adalah berdasarkan analisis lapisan yang dikekalkan oleh setiap kaedah terkini, seperti yang ditunjukkan dalam Jadual 3.
A. Pengesanan Perubahan Peta
Pengesanan perubahan dalam peta HD merujuk kepada proses mengenal pasti perubahan dalam persekitaran, seperti pembinaan baharu, penutupan jalan, dsb. Lapisan peta kemudiannya dikemas kini dengan sewajarnya. Peta HD sentiasa berubah dan mempunyai peta yang boleh dipercayai oleh kereta pandu sendiri adalah penting untuk navigasi yang selamat. Pengesanan perubahan biasanya dicapai melalui penggunaan pelbagai penderia, seperti kamera, lidar dan radar, digabungkan dengan algoritma penglihatan komputer dan teknik pembelajaran mesin. Malah sebelum kemunculan peta definisi tinggi, algoritma pengesanan perubahan telah menemui jalan mereka ke dalam banyak aplikasi. Penderiaan jauh ialah salah satu aplikasi awal pengesanan dan pengemaskinian perubahan peta. Ia juga telah berjaya digunakan dalam pemantauan bandar, perubahan hutan, pemantauan krisis, pengemaskinian maklumat geografi tiga dimensi, pemantauan kemajuan pembinaan dan tinjauan sumber. Pada tahap paling asas dalam aplikasi ini, masalahnya ialah membandingkan data sensor mentah, terutamanya awan titik 3D, imej 2D atau gabungan kedua-duanya.
B. Kemas kini data peta
Fasa kedua penyelenggaraan peta HD adalah untuk mengemas kini elemen peta berdasarkan hasil pengesanan perubahan. Ringkasnya, pengemaskinian peta adalah bersamaan dengan masalah gabungan data kebarangkalian. Memantau perubahan secara berterusan dalam persekitaran yang sentiasa berubah dalam hampir masa nyata dan menggabungkan corak data yang berbeza dalam masa dan ruang, serta mengemas kini berbilang lapisan daripada sumber yang berbeza, sememangnya satu tugas yang mencabar. Cadena et al mencatat dalam kertas tinjauan mereka bahawa proses pengedaran mengemas kini dan menyelenggara peta definisi tinggi yang dibuat dan digunakan oleh kumpulan besar kenderaan autonomi adalah topik yang menarik untuk penyelidikan masa depan. Dalam arah ini, Kim et al mencadangkan penyelesaian untuk memastikan lapisan ciri baharu dikemas kini daripada data awan titik sumber ramai. Peta ciri baharu ini menjadi asas untuk membina ciri semantik dan geometri yang berbeza untuk peta HD.
Infrastruktur data dan komunikasi untuk peta HD
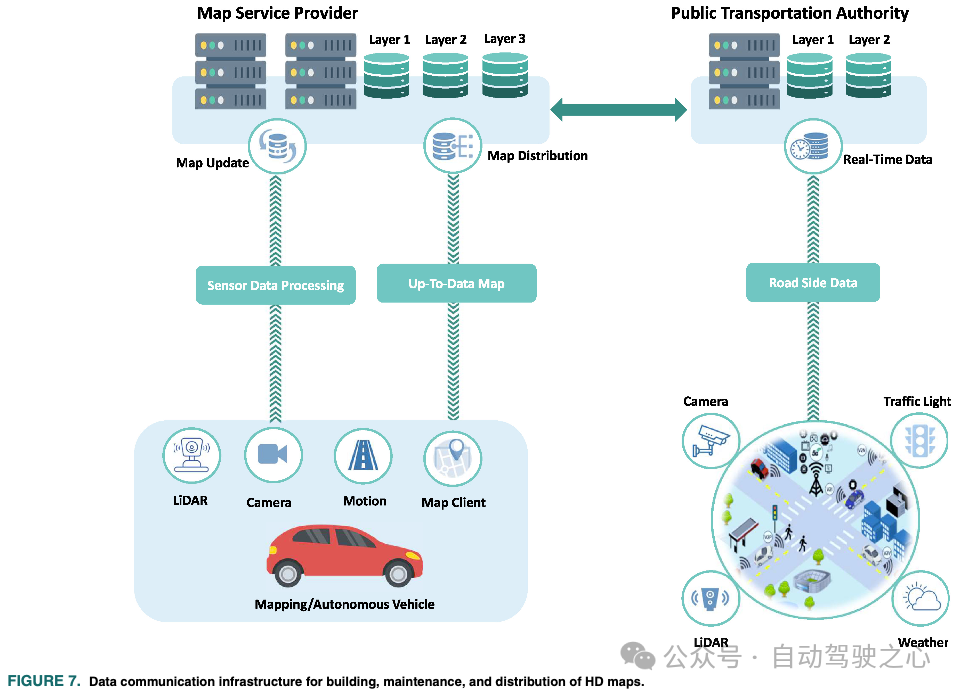
Membina dan menyelenggara peta HD pada skala ialah masalah pertukaran data antara pelbagai pihak berkepentingan, cth. kerajaan sebagai pemilik infrastruktur tepi jalan ITS, penyedia peta dan kenderaan, seperti yang ditunjukkan dalam Rajah 7. Pengumpulan, pembinaan, penyelenggaraan dan pengedaran data peta memerlukan komunikasi yang boleh dipercayai dan infrastruktur pengkomputeran teragih. Bahagian ini membincangkan infrastruktur data dan komunikasi yang diperlukan untuk menskalakan penciptaan, penyelenggaraan dan pengedaran peta HD.
Cabaran dan Tinjauan Masa Depan
Walaupun CCAM telah mencapai kemajuan yang ketara sepanjang dekad yang lalu, mencapai autonomi kenderaan penuh kekal sebagai cabaran yang tidak dapat diselesaikan. Untuk kenderaan autonomi digunakan pada skala, penyelesaian berskala untuk pemetaan HD adalah penting. Dalam bahagian ini, kami menerangkan pelbagai cabaran yang perlu ditangani untuk merealisasikan potensi penuh CCAM peta HD. Tidak dinafikan bahawa ketersediaan penyelesaian kos efektif dan fleksibel untuk membina, menyelenggara dan mengedarkan data peta di kalangan pihak berkepentingan akan meningkatkan skala CCAM dalam generasi akan datang bandar pintar. Selain itu, kami membincangkan prospek masa depan dan aplikasi peta HD.
A. Cabaran
- Penstandardan dan perwakilan data: Konsep peta definisi tinggi telah diterima secara meluas dan telah menjadi teknologi utama untuk CCAM. Walau bagaimanapun, tiada kata sepakat tentang cara mewakili data peta, bilangan lapisan yang diperlukan, data peta yang mesti disimpan dalam setiap lapisan dan dalam format data apakah data peta mesti disimpan. Disebabkan oleh kerumitan peta HD dan jumlah besar data dan maklumat yang terkandung di dalamnya, adalah sukar untuk menentukan piawaian sejagat bagi mereka, menjadikannya mencabar untuk mencipta piawaian yang komprehensif dan mudah difahami, menyimpan, menyelenggara, mengemas kini, dan mengedarkan dengan berkesan. Menentukan standard biasa untuk data peta akan menyediakan lebih banyak keserasian data dan memudahkan akses kepada data sambil mengurangkan kos pembangunan dan penyepaduan. Tambahan pula, ini akan meningkatkan kualiti, konsistensi dan privasi data, sekali gus meningkatkan keselamatan jalan raya untuk semua pelakon, termasuk kenderaan automatik.
- Skalabilitas: Penyelesaian pemetaan HD boleh skala adalah penting untuk penggunaan skala besar kenderaan autonomi. Membina peta definisi tinggi bagi bandar, wilayah dan seluruh negara serta memastikannya dikemas kini kekal sebagai cabaran yang besar, terutamanya apabila berurusan dengan piawaian, peraturan lalu lintas dan peraturan berbeza yang digunakan untuk mewakili ciri jalan raya geometri dan tanda lalu lintas. Piawaian ini berbeza mengikut wilayah. Algoritma pemetaan mestilah generik dan boleh berfungsi merentas rantau dan negara yang berbeza. Pemetaan hendaklah merupakan proses pengumpulan dan pemprosesan data yang berterusan untuk membetulkan kawasan yang berubah. Proses ini menjadi mencabar di kawasan geografi yang besar di mana sejumlah besar kenderaan mesti menjadi sebahagian daripada proses pemetaan. Kos pemetaan bergantung secara langsung pada saiz kawasan yang hendak dipetakan dan bilangan kenderaan yang diperlukan untuk melaksanakannya. Seperti yang dibincangkan sebelum ini dalam artikel ini, pemetaan kenderaan adalah sangat mahal. Selain itu, menggunakan kenderaan individu yang dilengkapi dengan penderia gred pengguna memerlukan algoritma kompleks yang belum matang.
- Infrastruktur Rangkaian dan Pengkomputeran: Mengendalikan dan memproses sejumlah besar data dalam konteks membina dan mengemas kini peta HD boleh skala memerlukan infrastruktur rangkaian dan pengkomputeran yang boleh dipercayai yang diselaraskan dan hampir dalam masa nyata. Dengan kemunculan komunikasi selular 5G/6G, Internet of Things (IoT) dan seni bina pengkomputeran tepi, banyak peluang untuk komunikasi dalam kenderaan secara amnya tersedia, menjadikan penyelesaian yang mengendalikan pembinaan peta definisi tinggi sebagai pilihan yang berdaya maju secara komersial. Infrastruktur komunikasi dan pengkomputeran ini direka bentuk untuk mengendalikan aplikasi intensif data sedemikian dan memenuhi keperluan kependaman dan lebar jalurnya. Peta sumber orang ramai berskala besar dengan bilangan besar kenderaan bersambung akan menjadi salah satu aplikasi utama infrastruktur ini.
- Keterbatasan algoritma pemetaan: Walaupun usaha R&D yang ketara dalam mengautomasikan proses membina peta HD, hasil penyelidikan terkini pada peta HD jelas menunjukkan bahawa algoritma pemetaan yang digunakan untuk mengekstrak ciri peta HD dan membina topologi jalan dan lorong Masih terhad kepada ciri mudah . Algoritma terkini boleh mengesan ciri geometri yang mudah tetapi tidak dapat mengendalikan ciri kelengkungan tinggi seperti bulatan. Tambahan pula, kebanyakan kaedah ini memerlukan beberapa langkah pasca pemprosesan untuk mendapatkan ciri dalam format vektor yang sesuai. Ciri semantik peta masih terhad kepada sebilangan kecil tanda lalu lintas yang mudah dikesan. Beberapa kerja baru-baru ini telah mula menangani masalah membina topologi lorong untuk membina rangkaian sambungan jalan/lorong yang dipermudahkan. Membangunkan saluran paip peta generik membolehkan pembinaan peta HD berfungsi sepenuhnya yang mengandungi maklumat geometri, semantik dan topologi. Membina saluran paip sedemikian kekal sebagai cabaran.
- Pemilikan Data Peta, Privasi, Integriti dan Pengedaran: Masa depan membina dan menyelenggara peta HD akan mengautomasikan dan mengedarkan proses yang terlibat kepada berjuta-juta kereta. Mengumpul, memproses dan menyimpan sejumlah besar data yang diedarkan daripada persekitaran menimbulkan beberapa kebimbangan tentang pemilikan data, privasi, integriti dan pengedaran. Data peta mentah dijana dalam kenderaan, diagregatkan dengan sumber data lain daripada pihak berkuasa awam, diproses dan diedarkan oleh penyedia peta. Pemilikan data peta daripada pengumpulan hingga pengedaran mungkin perlu ditangani dalam peta HD berskala besar. Selain itu, melindungi privasi individu dan kenderaan adalah penting dan mesti dipertimbangkan semasa proses lukisan. Data peta boleh termasuk maklumat pengguna yang sensitif seperti lokasi tepat kenderaan dan penerangan tepat tentang persekitaran kenderaan. Integriti data peta HD mesti dipastikan untuk mengelakkan keputusan yang salah dan membawa maut, terutamanya apabila digunakan dalam kenderaan autonomi. Membina peta definisi tinggi yang tepat dan boleh dipercayai kekal sebagai masalah penyelidikan yang berterusan. Peta HD komersial biasanya disemak dan disahkan secara manual. Menjana data peta definisi tinggi yang tepat dan boleh dipercayai daripada berbilang sumber data, seperti melalui penyumberan ramai, menimbulkan beberapa isu teknikal yang perlu diselesaikan. Pemilikan, privasi dan integriti peta definisi tinggi boleh skala baru-baru ini mula menarik perhatian penyelidik. Blockchain, sebaliknya, telah terbukti sebagai penyelesaian yang menjanjikan untuk memastikan integriti data kerana sifatnya yang diedarkan dan selamat. Kes penggunaan membina dan mengemas kini peta HD berskala sambil mengekalkan kebolehkesanan, privasi dan integriti data ialah aplikasi yang sempurna untuk blockchain. Teknologi ini dijangka memainkan peranan penting dalam membina dan mengedarkan generasi seterusnya peta definisi tinggi.
B. Hala Tuju Masa Depan
- Ketepatan: Kedudukan yang tepat telah menjadi salah satu motivasi utama untuk memperkenalkan peta definisi tinggi kepada kenderaan autonomi.Kewujudan perwakilan padat dan padat bagi persekitaran jalan adalah asas kepada peta HD; Sentiasa ada pertukaran antara ketumpatan maklumat yang terkandung dalam peta HD dan usaha pengiraan yang diperlukan untuk memproses maklumat ini. Kemajuan terkini dalam perwakilan pemandangan 3D neural memungkinkan untuk membina semula adegan 3D fotorealistik dalam perwakilan yang sangat padat. Mewakili lapisan peta asas menggunakan Medan Sinaran Neural (NeFR) membolehkan anda mendapat manfaat daripada perwakilan padat dan fotorealistik lapisan ini. Teknologi ini boleh membawa kepada era baharu kereta pandu sendiri.
- Aplikasi melangkaui pemanduan autonomi: Peta HD dibangunkan terutamanya untuk membantu kenderaan autonomi memahami persekitaran mereka dan menavigasi dengan selamat di dalamnya. Memandangkan peta HD memberikan gambaran persekitaran yang terperinci dan tepat, ia juga boleh digunakan untuk meningkatkan kualiti pelbagai perkhidmatan yang disediakan oleh peta digital klasik. Selain itu, peta HD memainkan peranan penting dalam teknologi bantuan digital untuk orang kurang upaya. Jika orang cacat penglihatan dilengkapi dengan penderia yang sesuai dan mempunyai akses kepada perwakilan yang sangat tepat, terperinci dan kaya semantik bagi persekitaran mereka, mobiliti dan keselamatan mereka boleh dipertingkatkan dengan ketara. Jika diletakkan dengan tepat, peranti bantuan digital akan dapat mentafsir dan memahami persekitaran untuk menjana mesej navigasi suara untuk navigasi yang selamat. Status masa nyata lampu isyarat dan maklumat trafik lain dalam peta HD pejalan kaki adalah relevan untuk mempertingkatkan kefungsian peranti ini. Pada masa ini, kebanyakan penyedia peta HD hanya menyediakan peta yang mewakili persekitaran kenderaan. Laluan yang melibatkan peserta selain kenderaan, seperti laluan pejalan kaki dan laluan basikal, masih tidak dipetakan dalam peta HD hari ini. Membina dan mengemas kini peta definisi tinggi untuk semua peserta akan membuka jalan kepada pelbagai navigasi autonomi dan bukan autonomi, serta beberapa perkhidmatan digital yang berguna.
- Untuk kembar digital: Kembar digital persekitaran ialah perwakilan digital holistik persekitaran, termasuk semua ciri fizikal dan fungsinya. Kembar digital berskala bandar ialah konsep baru muncul dalam CCAM yang bertujuan untuk membina model dipacu data yang akan menggabungkan pelbagai sumber data daripada penderia IoT, kenderaan bersambung, bangunan, infrastruktur pintar dan rangkaian pengangkutan, serta semua sumber data lain. digabungkan untuk membantu mencipta model bandar masa nyata yang komprehensif untuk meningkatkan perkhidmatan jalan raya. Konsep ini menyamaratakan peta HD sebagai model digital untuk kenderaan bersambung dan autonomi kepada model digital holistik yang membantu semua entiti dalam masyarakat. Kembar digital juga boleh digunakan untuk memodelkan tingkah laku entiti yang berbeza dalam persekitaran, walaupun pada tahap perincian mikroskopik. Peta HD akan menjadi modul tunggal kembar digital, menyokong ciri dan perkhidmatan yang berbeza untuk kenderaan bersambung dan autonomi di bandar pintar kami. Memandangkan peta definisi tinggi boleh digunakan untuk mensimulasikan senario pemanduan yang kompleks, kembar digital akan digunakan untuk mensimulasikan dan menganalisis senario skala bandar yang kompleks untuk kenderaan ini. Kembar digital akan membolehkan kajian, analisis dan simulasi kesan perkembangan baharu atau perubahan dalam corak trafik dan boleh membantu perancang bandar dan pembuat keputusan menganalisis dan mengoptimumkan prestasi bandar dengan meramalkan senario masa depan dan mengenal pasti peluang untuk penambahbaikan. Membina kembar digital berskala bandar sememangnya satu cabaran yang besar, memerlukan sejumlah besar data, dan ia boleh menjadi proses yang kompleks dan memakan masa. Pengesahan silang, integriti dan kebolehpercayaan sejumlah besar data yang diedarkan kekal sebagai cabaran dalam mewujudkan kembar digital. Pemetaan jalan sumber ramai daripada kenderaan akan digantikan dengan proses bersatu untuk pemetaan luar dan dalam menggunakan sejumlah besar data daripada penderia yang disambungkan secara heterogen secara serentak.
Kesimpulan
Pemetaan HD terus menjadi aspek yang berkembang pesat dalam aplikasi CCAM dunia sebenar, memacu inovasi dan kemajuan dalam bidang tersebut. Walaupun sejumlah besar kerja penyelidikan dan pembangunan telah dijalankan ke atas aplikasi peta HD dalam sistem AD dan pada algoritma dan infrastruktur untuk membina dan menyelenggara peta HD, terdapat sangat sedikit literatur yang boleh merumuskan dan memberikan pijakan untuk usaha ini. . Kertas kerja ini menyediakan semakan yang meluas tentang kerja-kerja terdahulu untuk membina dan menyelenggara peta HD, termasuk penyelesaian kos efektif, serta keperluan data komunikasi dan peta dari generasi ke pengedaran. Selain itu, artikel ini membincangkan cabaran semasa dalam membina dan menyelenggara peta HD. Lebih tepat lagi, kami menyediakan gambaran keseluruhan bebas peta HD sebagai konteks untuk komuniti sistem pengangkutan pintar yang lebih luas. Kami juga membincangkan dan menganalisis teknologi terkini untuk menggunakan peta HD untuk pelbagai fungsi teras dalam sistem AD. Selain itu, kami membincangkan dan menyemak secara meluas pendekatan, kaedah dan algoritma yang berbeza untuk membina peta HD pada tahap yang berbeza dan memastikannya dikemas kini. Akhir sekali, kami memberi sedikit pencerahan tentang pembangunan masa depan peta HD untuk aplikasi mudah alih generasi akan datang.
Atas ialah kandungan terperinci MapNeXt berasaskan awan dan berasaskan kereta sudah selesai! Pembinaan peta berketepatan tinggi dalam talian generasi akan datang. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- 使用百度地图如何实现地图网格
- Mengapa Peta Petal tidak tersedia di China?
- Penyelesaian data pemanduan pintar 2.0: Kecekapan pemprosesan data AI dipertingkatkan secara menyeluruh, dan teknologi keluaran data pengukuran awan dinaik taraf.
- Sistem Pemanduan Pintar NIO: Satu pencapaian baharu perbatuan pemanduan melebihi 500 juta kilometer
- NIO menerajui dalam mengeluarkan SkyOS, sistem pengendalian global, membuka lembaran baharu dalam pemanduan pintar