

 Peranti teknologiAIPenyelidikan umum ke dalam tempat letak kenderaan autonomi, menyepadukan piawaian industri, penilaian trend dan pengenalan sistem
Peranti teknologiAIPenyelidikan umum ke dalam tempat letak kenderaan autonomi, menyepadukan piawaian industri, penilaian trend dan pengenalan sistemPenyelidikan umum ke dalam tempat letak kenderaan autonomi, menyepadukan piawaian industri, penilaian trend dan pengenalan sistem

Ditulis di hadapan
Sistem parkir automatik bermakna kenderaan boleh mencari tempat letak kereta secara bebas dan melengkapkan tempat letak kereta yang tepat tanpa campur tangan manual. Ia juga boleh bergerak ke lokasi yang ditetapkan mengikut keperluan pengguna. Kematangan teknologi ini akan banyak mengurangkan kesulitan orang ramai semasa proses parkir, seperti membuang masa mencari tempat letak kereta untuk jangka masa yang lama, serta isu keselamatan seperti perlanggaran kenderaan dan geseran yang mungkin berlaku semasa mencari tempat letak kereta.
Pada masa ini, banyak syarikat teknologi dan makmal universiti sedang menerokai bidang parkir autonomi. Syarikat seperti Mercedes-Benz dan Bosch telah mewujudkan infrastruktur tempat letak kereta NVIDIA sedang membangunkan algoritma pemanduan automatik dan kaedah pengesanan ruang letak kereta untuk tempat letak kereta BMW juga telah memasang modul parkir automatik pada kenderaan pengeluaran.
Memandangkan permintaan meluas untuk teknologi tempat letak kereta automatik dalam industri, kami menjalankan tinjauan sistematik mengenai status pembangunan sistem tempat letak kereta automatik. Termasuk Trend standard industri sistem parkir automatik, Penunjuk penilaian prestasi, Teknologi yang direka bentuk ke dalam setiap sub-modul sistem parkir automatik, dsb.
Trend standard semasa dalam industri tempat letak kereta automatik
Memandangkan sistem tempat letak kereta automatik semasa telah mendapat perhatian meluas daripada industri dan akademia, pelbagai negara dan syarikat sentiasa membangunkan teknologi parkir automatik. Oleh itu, adalah penting untuk merumuskan piawaian untuk teknologi tempat letak kereta automatik. Piawaian teknikal yang telah dirumuskan termasuk Maklumat Geografi, Kedudukan Luar, Kedudukan Ruang Dalaman, Piawaian Tempat Letak Kereta dan Piawaian Komunikasi Kenderaan diringkaskan dalam jadual di bawah.
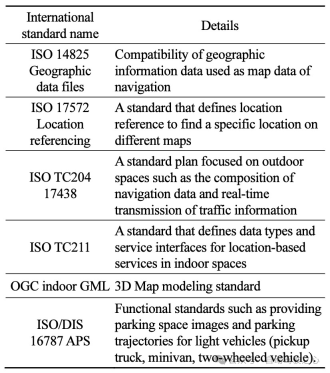
Standard yang berkaitan dalam industri tempat letak kereta automatik
- Maklumat geografi dan piawaian kedudukan menetapkan prinsip dan asas untuk penamaan, definisi dan format ruang luar termasuk ISO 14825, ISO 17572 dan ISO TC2034.
- Penstandardan kedudukan spatial dalaman juga sedang dirumuskan, termasuk piawaian ISO TC211 dan OGC.
- Piawaian tempat letak kereta ISO/DIS 16787 APS mencadangkan jenis maklumat yang diperlukan untuk tempat letak kereta dan mentakrifkan nama teknikal untuk mengawal kenderaan. Selain itu, piawaian mentakrifkan fungsi yang diperlukan untuk melaksanakan sistem parkir berbantu dan melaksanakan fungsi kawalan stereng kenderaan.
Piawaian penilaian untuk sistem parkir automatik
Penilaian semasa sistem parkir automatik merangkumi dua bahagian, iaitu penilaian bahagian pemanduan automatik dan penilaian bahagian parkir automatik.
Piawaian Penilaian untuk Bahagian Pemanduan Autonomi
Penilaian teknologi pemanduan autonomi mengikut piawaian "Peringkat Teknologi Pemanduan Autonomi" yang dirumus oleh Persatuan Kejuruteraan Automotif Piawaian ini membahagikan teknologi pemanduan autonomi kepada enam tahap, berdasarkan tahap teknikal dan kawalan subjek dan keupayaan memandu. Untuk memudahkan penilaian setiap peringkat, piawaian ISO/WD 34501 dan ISO/WD 34502 yang sedang dibangunkan telah dicadangkan. Piawaian ISO/WD 34501 digunakan pada terma dan takrifan untuk senario ujian dalam sistem Tahap 3, manakala standard ISO/WD 34502 menyediakan panduan tentang senario ujian dan proses penilaian keselamatan. Penggubalan piawaian ini bertujuan untuk menyediakan kriteria penilaian bersatu untuk pembangunan dan aplikasi teknologi pemanduan autonomi dan menggalakkan pembangunan teknologi pemanduan autonomi.
Piawaian penilaian untuk bahagian parkir automatik
Walaupun teknologi parkir automatik kini menarik perhatian ramai, pembangunan piawaian antarabangsa masih di peringkat awal. Tidak seperti piawaian penilaian pemanduan autonomi, tahap teknikal tempat letak kereta autonomi diukur terutamanya oleh piawaian penilaian pembangun.
Jadual berikut menunjukkan contoh senario tempat letak kereta autonomi dalam sistem senario situasi trafik dibahagikan mengikut tahap prestasi.
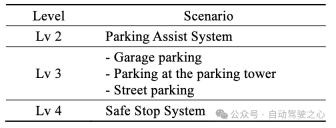
Pembahagian peringkat tempat letak kereta automatik
Penilaian sistem senario situasi trafik merangkumi dua bahagian senario: pemanduan dan tempat letak kenderaan autonomi, dan menggunakan "peringkat teknologi pemanduan autonomi" yang ditakrifkan oleh Persatuan Kejuruteraan Automotif untuk menunjukkan keupayaan tempat letak kenderaan berautonomi. Pada masa ini terdapat tiga peringkat dalam sistem.
- Tahap 2 (Lv2): Ia dipanggil sistem bantuan letak kereta dan digunakan untuk membantu orang ramai meletak kenderaan dengan lebih mudah. Pada tahap Lv2, kenderaan biasanya dilengkapi dengan sistem amaran jarak halangan dan kamera pandang belakang.
- Tahap 3 (Lv3): Tahap 3 boleh merealisasikan tempat letak kereta automatik dalam senario yang ditetapkan. Contohnya, senario tempat letak kereta mudah seperti tempat letak kereta di garaj.
- Tahap 4 (Lv4): Semua senario dalam Lv3 boleh dilakukan di Lv4. Selain itu, apabila kenderaan menghadapi halangan, kenderaan boleh kembali ke destinasinya selepas berhenti atau mengelak halangan tersebut. . . Kami mula-mula memberikan pengenalan umum kepada setiap proses, dan kemudian memperkenalkan arah aliran pembangunan semasa setiap proses.
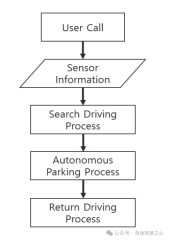
Aliran kerja sistem parkir automatik
Proses pemanduan carian
Matlamat utama proses pemanduan carian ialah kereta boleh mencari tempat letak kereta secara autonomi di tempat letak kereta, jadi proses ini memerlukan penggunaan Kedudukan, Pengelak perlanggaran dan Teknologi pengesanan ruang letak kereta.
Pengenalan kepada teknologi penentududukan
Dalam sistem parkir automatik, GPS atau sensor IMU kenderaan sendiri boleh digunakan untuk mengesahkan kelajuan dan sikap kenderaan serta membetulkan ralat anggaran kedudukan kenderaan. Walau bagaimanapun, dalam beberapa adegan dalaman, isyarat GPS tidak boleh diterima. Oleh itu, kenderaan pandu sendiri perlu dilengkapi dengan kamera, lidar dan radar gelombang milimeter untuk mendapatkan bantuan. Gambar di bawah adalah pengenalan kepada beberapa maklumat sensor yang dilengkapi pada kenderaan.
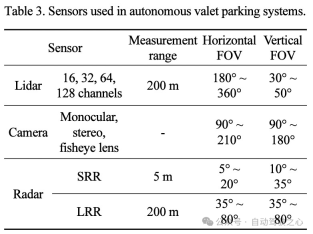
Pengenalan kepada maklumat penderia yang dilengkapi dengan kenderaan parkir automatik
- Penderia lidar menggunakan laser untuk mengesan objek. Lidar yang popular pada masa ini kebanyakannya dibahagikan kepada 16, 32, 64 dan 128 baris lidar. Julat ukurannya adalah kira-kira 200 meter dan medan pandangan menegaknya ialah 30 hingga 50 darjah.
- Penderia kamera boleh dibahagikan secara kasar kepada jenis monokular, binokular dan fisheye. Kebiasaannya, kenderaan autonomi dilengkapi dengan kamera dengan medan pandangan mendatar 90 hingga 210 darjah dan medan pandangan menegak 90 hingga 180 darjah.
- Radar gelombang milimeter boleh dibahagikan kepada radar jarak dekat dan radar jarak jauh berdasarkan jarak. Antaranya, julat radar jarak dekat adalah kira-kira 5 meter, medan pandangan mendatar ialah 5 hingga 20 darjah, dan medan pandangan menegak ialah 10 hingga 35 darjah. Julat radar jarak jauh boleh menjadi kira-kira 200 meter, dengan medan pandangan mendatar dan menegak 35 hingga 80 darjah.
Selepas mendapatkan maklumat yang dikumpul oleh penderia berbeza ini, teknologi pemetaan SLAM boleh digunakan untuk membina semula persekitaran di sekeliling kenderaan autonomi untuk mencapai kedudukan kenderaan. Teknologi pemetaan SLAM boleh dibahagikan kepada dua kategori berikut: kaedah pemetaan langsung: mengesan keamatan data yang berubah apabila penderia bergerak untuk menganggarkan sikap penderia. Walau bagaimanapun, kerana kaedah jenis ini mudah dipengaruhi oleh perubahan pencahayaan dan tidak dapat mencapai penempatan semula, kaedah pemetaan semasa jarang berdasarkan kaedah jenis ini.
- Kaedah pemetaan berasaskan ciri: Kaedah jenis ini mula-mula memperoleh titik ciri objek sekeliling daripada maklumat penderia. Titik ciri yang diterima daripada objek yang sama diunjurkan kepada dua koordinat penderia yang berbeza, dan kedudukan sasaran dianggarkan dengan mengira hubungan geometri titik yang diunjurkan.
Oleh kerana senario aplikasi utama sistem parkir automatik adalah di tempat letak kereta, dan akan terdapat banyak kenderaan yang diletakkan di tempat letak kereta, teknologi anti-perlanggaran adalah sangat penting . Dalam teknologi anti-perlanggaran, penderia ultrasonik
,penderia radar gelombang pendek, penderia Lidar dan penderia kamera digunakan terutamanya. Penderia akustik dan radar digunakan terutamanya untuk mencapai julat yang tepat. Penderia kamera terutamanya menggunakan perbezaan kedudukan objek yang sama dalam imej berturut-turut untuk menganggarkan jarak secara mendalam.
Teknologi pengesanan ruang letak keretaPengesanan ruang letak kereta dilakukan secara berterusan semasa proses pencarian dan pemanduan, dan biasanya termasuk penglihatan komputer tradisional, pembelajaran mendalam dan pelaksanaan hibrid kedua-dua kaedah.
Penglihatan komputer tradisional terutamanya menentukan dan mengenal pasti bentuk tempat letak kereta, seperti pengesanan garisan ruang letak kereta dan pengesanan titik ciri, seperti yang ditunjukkan dalam rajah di bawah.Contoh bentuk ruang letak kereta
Proses pengesanan ruang letak kereta berdasarkan rangkaian neural convolutional
Proses parkir automatik
Sekiranya proses pencarian dan pemanduan pada langkah sebelumnya mendapati ruang parkir yang tersedia, sistem akan memanggil proses parkir automatik. Secara amnya, kami menggunakan kaedah penjanaan laluan untuk melaksanakan proses parkir autonomi. Pada masa ini, kaedah penjanaan laluan arus perdana terutamanya termasuk kaedah berasaskan algoritma dan kaedah berasaskan pembelajaran pengukuhan.
Pendekatan berasaskan algoritma melibatkan pengiraan lokasi dan bentuk laluan ke tempat letak kereta dan lokasi semasa kenderaan. Untuk mengira laluan letak kereta yang sesuai, algoritma melibatkan algoritma seperti masalah kawalan optimum, kaedah perancangan laluan berasaskan grid, dan penerokaan pantas pokok rawak.
Kaedah berasaskan pembelajaran pengukuhan boleh menjana laluan optimum untuk proses parkir autonomi dalam simulator tempat letak kereta autonomi. Dalam simulator letak kereta autonomi, kenderaan mempelajari prosedur tempat letak kereta biasa. Kaedah pembelajaran ini secara berterusan memperoleh laluan optimum dengan ketepatan parkir tertinggi dengan mengulangi proses penjanaan dan penilaian laluan, seperti yang ditunjukkan dalam rajah di bawah.

Proses parkir terbalik parking automatik
Kembali ke proses pemanduan
Kembali ke proses pemanduan bermaksud apabila kenderaan pandu sendiri memasuki tempat letak kereta dan menunggu, pengguna boleh memanggil kenderaan untuk bergerak. Pergi ke tempat yang ditentukan oleh pengguna. Dalam proses ini, kita perlu menggunakan teknologi penjejakan laluan.
Pada masa ini, teknologi penjejakan laluan termasuk kaedah menjejak laluan perjalanan dan kaedah menjejak laluan yang diubah suai. Walau bagaimanapun, kedua-dua kaedah menggunakan algoritma kawalan kenderaan yang serupa Untuk butiran, sila rujuk kertas [1-2]. Idea umum adalah untuk melaksanakan arahan kawalan untuk menggerakkan kenderaan di sepanjang laluan yang dijana dengan mengambil kira kedudukan semasa kenderaan dan keadaan sudut stereng.
Kesimpulan
Disebabkan peningkatan permintaan untuk teknologi parkir automatik, pelbagai negara dan pengilang sedang giat membangunkan sistem parkir automatik. Dengan mengambil kira perkembangan pesat teknologi tempat letak kereta automatik, dalam artikel ini, kami meringkaskan trend penyeragaman, piawaian penilaian dan pelbagai komponen sistem tempat letak kereta automatik dalam sistem tempat letak kereta automatik dan memperkenalkannya secara terperinci Kami berharap ia dapat membantu semua orang

Pautan asal: https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
Atas ialah kandungan terperinci Penyelidikan umum ke dalam tempat letak kenderaan autonomi, menyepadukan piawaian industri, penilaian trend dan pengenalan sistem. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

 Pembantu AI baru Meta: Booster Produktiviti atau Tenggelam Masa?May 01, 2025 am 11:18 AM
Pembantu AI baru Meta: Booster Produktiviti atau Tenggelam Masa?May 01, 2025 am 11:18 AMMETA telah bergabung dengan rakan-rakan seperti Nvidia, IBM dan Dell untuk mengembangkan integrasi penempatan peringkat perusahaan Llama Stack. Dari segi keselamatan, Meta telah melancarkan alat -alat baru seperti Llama Guard 4, Llamifirewall dan Cyberseceval 4, dan melancarkan program pembela Llama untuk meningkatkan keselamatan AI. Di samping itu, META telah mengedarkan $ 1.5 juta dalam geran Llama Impact kepada 10 institusi global, termasuk pemula yang bekerja untuk meningkatkan perkhidmatan awam, penjagaan kesihatan dan pendidikan. Permohonan Meta AI yang baru dikuasakan oleh Llama 4, dikandung sebagai Meta AI
 80% Gen Zers akan berkahwin dengan AI: KajianMay 01, 2025 am 11:17 AM
80% Gen Zers akan berkahwin dengan AI: KajianMay 01, 2025 am 11:17 AMJoi Ai, sebuah syarikat yang merintis interaksi manusia-ai, telah memperkenalkan istilah "AI-Lationships" untuk menggambarkan hubungan yang berkembang ini. Jaime Bronstein, ahli terapi hubungan di Joi Ai, menjelaskan bahawa ini tidak dimaksudkan untuk menggantikan manusia c
 AI membuat masalah bot Internet lebih teruk. Permulaan $ 2 bilion ini berada di barisan hadapanMay 01, 2025 am 11:16 AM
AI membuat masalah bot Internet lebih teruk. Permulaan $ 2 bilion ini berada di barisan hadapanMay 01, 2025 am 11:16 AMPenipuan dalam talian dan serangan bot menimbulkan cabaran penting bagi perniagaan. Peruncit melawan bot produk penimbunan, pengambilalihan akaun Bank Battle, dan platform media sosial berjuang dengan peniru. Kebangkitan AI memburukkan lagi masalah ini, Rende
 Menjual ke Robot: Revolusi Pemasaran yang akan membuat atau memecahkan perniagaan andaMay 01, 2025 am 11:15 AM
Menjual ke Robot: Revolusi Pemasaran yang akan membuat atau memecahkan perniagaan andaMay 01, 2025 am 11:15 AMEjen AI bersedia untuk merevolusikan pemasaran, yang berpotensi melampaui kesan peralihan teknologi terdahulu. Ejen -ejen ini, yang mewakili kemajuan yang signifikan dalam AI generatif, bukan sahaja memproses maklumat seperti chatgpt tetapi juga mengambil actio
 Bagaimana Teknologi Penglihatan Komputer Mengubah NBA Playoff merasmikanMay 01, 2025 am 11:14 AM
Bagaimana Teknologi Penglihatan Komputer Mengubah NBA Playoff merasmikanMay 01, 2025 am 11:14 AMImpak AI terhadap keputusan NBA Game 4 penting Dua pertandingan NBA permainan yang penting mempamerkan peranan permainan AI yang berubah-ubah dalam merasmikan. Pada mulanya, Nikola Jokic dari Denver yang terlepas tiga pointer membawa kepada lorong-lorong terakhir yang terakhir oleh Aaron Gordon. Sony's Haw
 Bagaimana AI mempercepat masa depan ubat regeneratifMay 01, 2025 am 11:13 AM
Bagaimana AI mempercepat masa depan ubat regeneratifMay 01, 2025 am 11:13 AMSecara tradisinya, memperluaskan kepakaran perubatan regeneratif secara global menuntut perjalanan yang luas, latihan tangan, dan tahun mentor. Sekarang, AI sedang mengubah landskap ini, mengatasi batasan geografi dan mempercepatkan kemajuan melalui en
 Pengambilan kunci dari Intel Foundry Direct Connect 2025May 01, 2025 am 11:12 AM
Pengambilan kunci dari Intel Foundry Direct Connect 2025May 01, 2025 am 11:12 AMIntel sedang berusaha untuk mengembalikan proses pembuatannya ke kedudukan utama, sambil cuba menarik pelanggan semikonduktor yang hebat untuk membuat cip di fabanya. Untuk tujuan ini, Intel mesti membina lebih banyak kepercayaan dalam industri, bukan sahaja untuk membuktikan daya saing prosesnya, tetapi juga untuk menunjukkan bahawa rakan kongsi boleh mengeluarkan cip dalam aliran kerja yang biasa dan matang, konsisten dan sangat dipercayai. Semua yang saya dengar hari ini membuatkan saya percaya Intel bergerak ke arah matlamat ini. Ucapan utama CEO baru Tan Libai memulakan hari. Tan Libai adalah mudah dan ringkas. Beliau menggariskan beberapa cabaran dalam Perkhidmatan Foundry Intel dan langkah -langkah syarikat telah mengambil untuk menangani cabaran -cabaran ini dan merancang laluan yang berjaya untuk perkhidmatan Foundry Intel pada masa akan datang. Tan Libai bercakap mengenai proses perkhidmatan OEM Intel yang dilaksanakan untuk menjadikan pelanggan lebih banyak
 Ai salah? Sekarang ada insurans ' s untuk ituMay 01, 2025 am 11:11 AM
Ai salah? Sekarang ada insurans ' s untuk ituMay 01, 2025 am 11:11 AMMengulas kebimbangan yang semakin meningkat di sekitar risiko AI, Chaucer Group, firma insurans semula khusus global, dan Armilla AI telah bergabung untuk memperkenalkan produk insurans liabiliti pihak ketiga (TPL) novel. Dasar ini melindungi perniagaan terhadap


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)

SecLists
SecLists ialah rakan penguji keselamatan muktamad. Ia ialah koleksi pelbagai jenis senarai yang kerap digunakan semasa penilaian keselamatan, semuanya di satu tempat. SecLists membantu menjadikan ujian keselamatan lebih cekap dan produktif dengan menyediakan semua senarai yang mungkin diperlukan oleh penguji keselamatan dengan mudah. Jenis senarai termasuk nama pengguna, kata laluan, URL, muatan kabur, corak data sensitif, cangkerang web dan banyak lagi. Penguji hanya boleh menarik repositori ini ke mesin ujian baharu dan dia akan mempunyai akses kepada setiap jenis senarai yang dia perlukan.

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Dreamweaver Mac版
Alat pembangunan web visual

