
Rumah >Peranti teknologi >AI >Pengubah Titik Dikemas kini: lebih cekap, lebih pantas dan lebih berkuasa!
Pengubah Titik Dikemas kini: lebih cekap, lebih pantas dan lebih berkuasa!

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2024-01-17 08:27:051507semak imbas
Tajuk asal: Point Transformer V3: Lebih Ringkas, Lebih Cepat, Lebih Kuat
Pautan kertas: https://arxiv.org/pdf/2312.10035.pdf
Pautan kod: https://github.com/Pointcept/PointTransformerV3
Unit: HKU SH AI Lab MPI PKU MITIdea tesis:
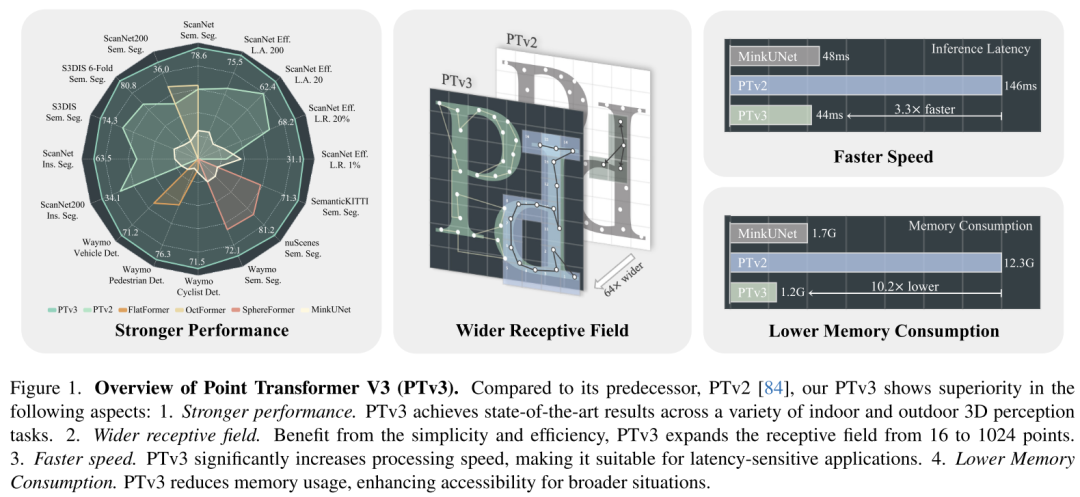
Artikel ini tidak berhasrat untuk mencari inovasi dalam mekanisme perhatian. Sebaliknya, ia memberi tumpuan kepada memanfaatkan kuasa skala untuk mengatasi pertukaran sedia ada antara ketepatan dan kecekapan dalam konteks pemprosesan awan titik. Mendapat inspirasi daripada kemajuan terkini dalam pembelajaran perwakilan berskala besar 3D, kertas kerja ini menyedari bahawa prestasi model lebih dipengaruhi oleh skala berbanding kerumitan reka bentuk. Oleh itu, kertas kerja ini mencadangkan Point Transformer V3 (PTv3), yang mengutamakan kesederhanaan dan kecekapan berbanding ketepatan mekanisme tertentu yang kurang memberi kesan kepada prestasi keseluruhan selepas penskalaan, seperti awan titik yang disusun dalam corak tertentu Pemetaan kejiranan bersiri yang cekap untuk menggantikan KNN carian kejiranan yang tepat. Prinsip ini membolehkan penskalaan yang ketara, memanjangkan medan penerimaan daripada 16 kepada 1024 mata, sambil kekal cekap (pemprosesan 3x lebih pantas dan 10x lebih cekap memori berbanding PTv2 sebelumnya). PTv3 mencapai keputusan terkini pada lebih daripada 20 tugasan hiliran yang meliputi senario dalaman dan luaran. PTv3 membawa keputusan ini ke peringkat seterusnya dengan peningkatan selanjutnya melalui latihan bersama multi-dataset.Reka Bentuk Rangkaian:
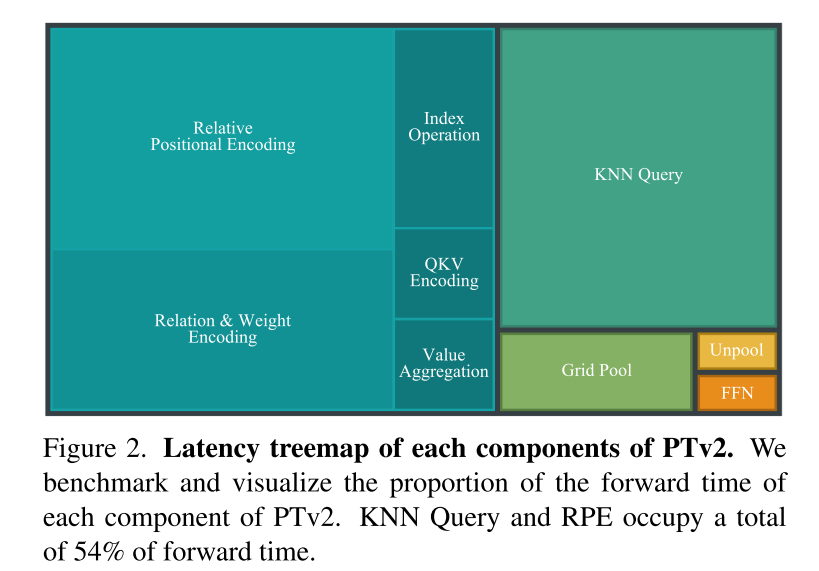
Kemajuan terkini dalam pembelajaran perwakilan 3D [85] telah mencapai kemajuan dalam mengatasi had skala data dalam pemprosesan awan titik dengan memperkenalkan kaedah latihan kolaboratif merentas berbilang set data 3D. Digabungkan dengan strategi ini, tulang belakang konvolusi yang cekap [12] secara berkesan merapatkan jurang ketepatan yang biasanya dikaitkan dengan pengubah awan titik [38, 84]. Walau bagaimanapun, pengubah awan titik sendiri masih belum mendapat manfaat sepenuhnya daripada kelebihan skala ini disebabkan oleh jurang kecekapan pengubah awan titik berbanding lilitan jarang. Penemuan ini membentuk motivasi awal untuk kerja ini: untuk menimbang semula pilihan reka bentuk pengubah titik dari perspektif prinsip penskalaan. Makalah ini percaya bahawa prestasi model lebih ketara dipengaruhi oleh skala daripada oleh reka bentuk yang kompleks. Oleh itu, artikel ini memperkenalkan Point Transformer V3 (PTv3), yang mengutamakan kesederhanaan dan kecekapan berbanding ketepatan mekanisme tertentu untuk mencapai kebolehskalaan. Pelarasan sedemikian mempunyai kesan yang boleh diabaikan ke atas prestasi keseluruhan selepas penskalaan. Khususnya, PTv3 membuat pelarasan berikut untuk mencapai kecekapan dan kebolehskalaan yang unggul:- Diilhamkan oleh dua kemajuan terkini [48, 77] dan mengiktiraf kelebihan kebolehskalaan awan titik tidak berstruktur berstruktur, PTv3 berubah Kedekatan ruang tradisional yang ditakrifkan oleh K-Nearest Pertanyaan Jiran (KNN) menyumbang 28% daripada masa hadapan. Sebaliknya, ia meneroka potensi kejiranan bersiri dalam awan titik yang disusun mengikut corak tertentu.
- PTv3 menggunakan pendekatan ringkas yang disesuaikan khusus untuk awan titik bersiri, menggantikan mekanisme interaksi patch perhatian yang lebih kompleks seperti tetingkap anjakan (yang menghalang gabungan pengendali perhatian) dan mekanisme kejiranan (membawa kepada penggunaan memori yang tinggi ).
- PTv3 menghapuskan pergantungan pada pengekodan kedudukan relatif, yang menyumbang 26% masa hadapan, memihak kepada lapisan konvolusi jarang bahagian hadapan yang lebih ringkas.
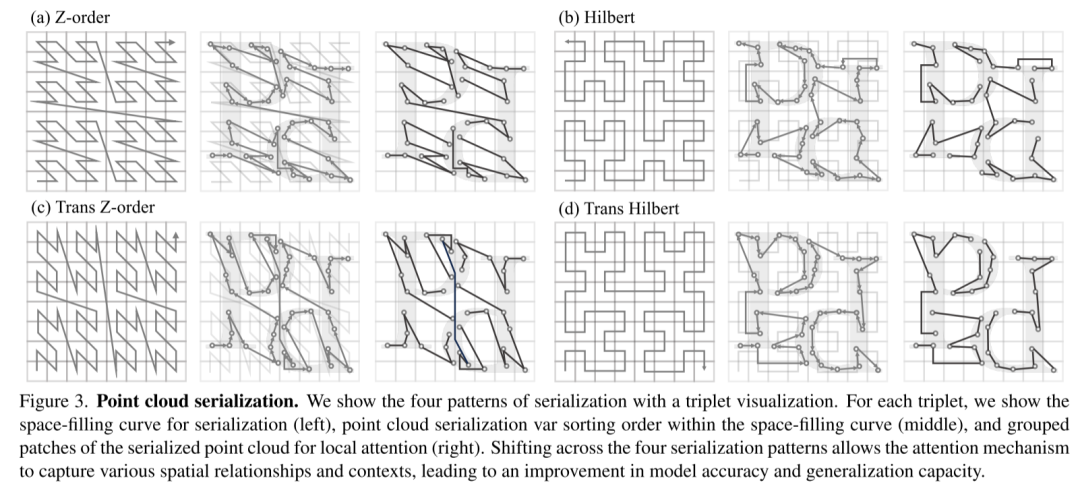
Rajah 3. Siri awan titik. Artikel ini menunjukkan empat corak bersiri melalui visualisasi triplet. Untuk setiap triplet, lengkung pengisian ruang untuk bersiri (kiri), susunan pemboleh ubah siri titik awan dalam lengkung pengisian ruang (tengah), dan tompok awan titik bersiri terkumpul untuk perhatian setempat ditunjukkan (kanan). Transformasi empat mod bersiri membolehkan mekanisme perhatian untuk menangkap pelbagai hubungan ruang dan konteks, dengan itu meningkatkan ketepatan model dan keupayaan generalisasi.
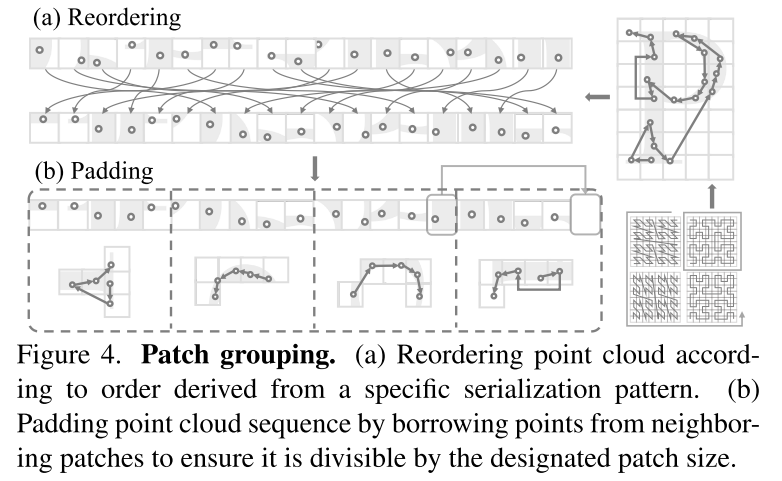
Rajah 4. Pengumpulan tampalan. (a) Menyusun semula awan titik mengikut susunan yang diperoleh daripada skema siri tertentu. (b) Isikan jujukan awan titik dengan meminjam mata daripada tampalan bersebelahan untuk memastikan ia boleh dibahagikan sama rata dengan saiz tampalan yang ditentukan.
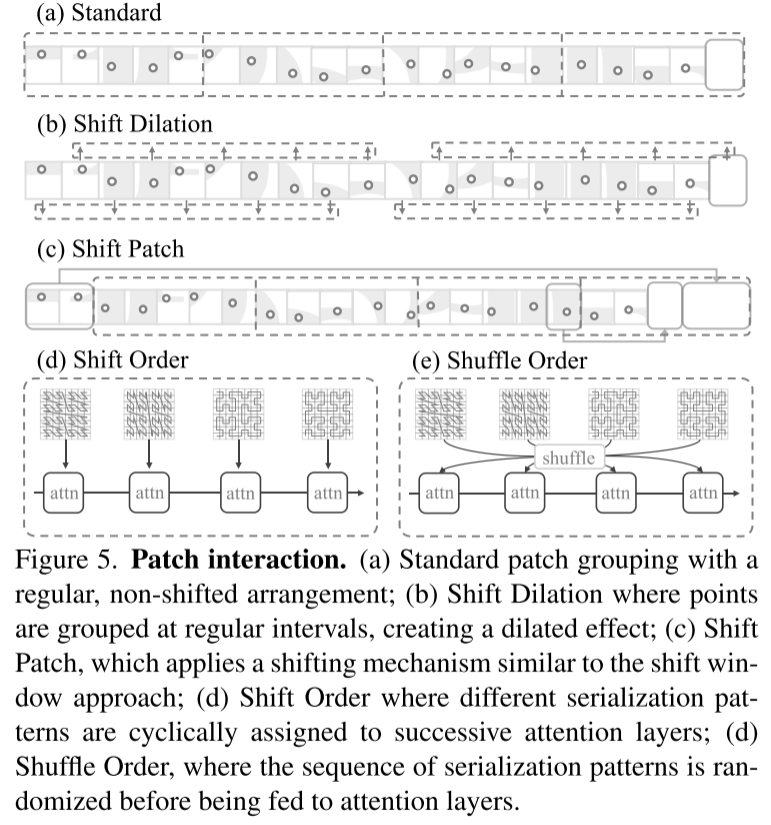
Rajah 5. Interaksi tampalan. (a) Pengelompokan tampalan standard, dengan susunan biasa, tidak beralih; (b) Pengembangan translasi, di mana titik diagregatkan pada selang masa yang tetap untuk menghasilkan kesan pengembangan, yang menggunakan mekanisme peralihan yang serupa dengan kaedah tetingkap anjakan ; (d) Susunan Anjakan, di mana corak siri yang berbeza secara kitaran diberikan kepada lapisan perhatian berturut-turut, di mana urutan corak siri adalah rawak sebelum dimasukkan ke lapisan perhatian.
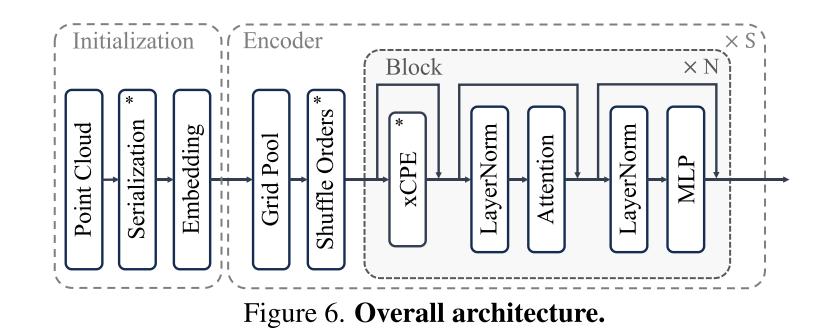
Rajah 6. Keseluruhan seni bina. Hasil eksperimen: Artikel ini memperkenalkan Point Transform er V3, yang berfungsi ke arah mengatasi ketepatan dalam pemprosesan awan titik Satu langkah besar ke hadapan daripada pertukaran tradisional antara kecekapan dan kecekapan. Berpandukan tafsiran baru mengenai prinsip penskalaan dalam reka bentuk tulang belakang, kertas kerja ini berpendapat bahawa prestasi model lebih dipengaruhi oleh skala daripada kerumitan reka bentuk. Dengan mengutamakan kecekapan berbanding ketepatan mekanisme impak yang lebih kecil, kertas kerja ini memanfaatkan kuasa skala, dengan itu meningkatkan prestasi. Ringkasnya, artikel ini boleh menjadikan model lebih berkuasa dengan menjadikannya lebih ringkas dan pantas.
Petikan:
Wu, X., Jiang, L., Wang, P., Liu, Z., Liu, X., Qiao, Y., Ouyang, W., He, T., & Zhao , H. (2023 Point Transformer V3: Lebih Mudah, Lebih Cepat, Lebih Kuat.
Atas ialah kandungan terperinci Pengubah Titik Dikemas kini: lebih cekap, lebih pantas dan lebih berkuasa!. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Latihan ViT dan MAE mengurangkan jumlah pengiraan sebanyak separuh! Sea dan Universiti Peking bersama-sama mencadangkan Adan pengoptimum yang cekap, yang boleh digunakan untuk model dalam
- Analisis prinsip pecutan latihan AI dan perkongsian amalan kejuruteraan
- Pengaturcara berada dalam bahaya! Dikatakan bahawa OpenAI merekrut tentera penyumberan luar secara global dan melatih petani kod ChatGPT langkah demi langkah
- NUS dan Byte bekerjasama merentas industri untuk mencapai latihan 72 kali lebih pantas melalui pengoptimuman model, dan memenangi Kertas Cemerlang AAAI2023.
- QTNet: Penyelesaian gabungan temporal baharu untuk awan titik, imej dan pengesan berbilang modal (NeurIPS 2023)