



Tidak perlu mengubah maksud asal, robot adalah teknologi yang boleh mempunyai kemungkinan tanpa had, terutamanya apabila digabungkan dengan teknologi pintar. Baru-baru ini, beberapa model berskala besar dengan aplikasi revolusioner dijangka menjadi hab robot pintar, membantu robot untuk melihat dan memahami dunia, membuat keputusan dan merancang
Baru-baru ini, diketuai oleh Yonatan Bisk dari CMU dan Fei Xia dari Google DeepMind Pasukan bersama mengeluarkan laporan semakan yang memperkenalkan aplikasi dan pembangunan model asas dalam bidang robotik. Pengarang pertama laporan itu ialah Yafei Hu, pelajar kedoktoran tahun empat di CMU yang penyelidikannya memfokuskan pada persimpangan robotik dan kecerdasan buatan. Berkolaborasi dengannya ialah Quanting Xie, yang menumpukan pada penerokaan kecerdasan yang terkandung melalui model asas.

Alamat kertas: https://arxiv.org/pdf/2312.08782.pdf
Membangunkan robot yang boleh menyesuaikan diri secara autonomi kepada persekitaran yang berbeza sentiasa menjadi impian manusia, tetapi ini adalah impian yang lama dan, jalan panjang Jalan yang mencabar. Sebelum ini, sistem persepsi robot yang menggunakan kaedah pembelajaran mendalam tradisional biasanya memerlukan sejumlah besar data berlabel untuk melatih model pembelajaran diselia, dan kos pelabelan set data besar melalui sumber ramai adalah sangat tinggi.
Selain itu, disebabkan keupayaan generalisasi terhad kaedah pembelajaran penyeliaan klasik, untuk menggunakan model ini kepada senario atau tugas tertentu, model terlatih ini biasanya memerlukan teknik penyesuaian domain yang direka dengan teliti, yang seterusnya sering memerlukan pengumpulan data selanjutnya dan langkah anotasi. Begitu juga, pendekatan perancangan dan kawalan robot klasik sering memerlukan pemodelan dunia yang teliti, dinamik ejen sendiri dan/atau dinamik ejen lain. Model ini biasanya dibina untuk setiap persekitaran atau tugas tertentu, dan apabila keadaan berubah, model itu perlu dibina semula. Ini menunjukkan bahawa prestasi penghijrahan model klasik juga terhad.
Malah, untuk kebanyakan kes penggunaan, membina model yang berkesan adalah sama ada terlalu mahal atau mustahil. Walaupun kaedah perancangan gerakan dan kawalan berasaskan pembelajaran yang mendalam (pengukuhan) membantu mengurangkan masalah ini, mereka masih mengalami peralihan pengedaran dan pengurangan keupayaan generalisasi.
Walaupun terdapat banyak cabaran dalam membangunkan sistem robotik tujuan umum, bidang pemprosesan bahasa semula jadi (NLP) dan penglihatan komputer (CV) telah mencapai kemajuan pesat baru-baru ini, termasuk model bahasa besar (LLM) untuk NLP, Difusi pengguna model untuk penjanaan imej kesetiaan tinggi, model visual yang berkuasa dan model bahasa visual untuk tugas CV seperti penjanaan sifar tangkapan/beberapa tangkapan.
Apa yang dipanggil "model asas" sebenarnya adalah model pra-latihan (LPTM) yang besar. Mereka mempunyai kebolehan visual dan lisan yang kuat. Baru-baru ini, model ini juga telah diaplikasikan dalam bidang robotik dan dijangka memberi sistem robotik persepsi dunia terbuka, perancangan tugas dan juga keupayaan kawalan gerakan. Selain menggunakan visi dan/atau model asas bahasa sedia ada dalam bidang robotik, beberapa pasukan penyelidik sedang membangunkan model asas untuk tugasan robot, seperti model tindakan untuk manipulasi atau model perancangan gerakan untuk navigasi. Model robot asas ini menunjukkan keupayaan generalisasi yang kuat dan boleh menyesuaikan diri dengan tugas yang berbeza dan juga penyelesaian khusus. Terdapat juga penyelidik yang secara langsung menggunakan model asas penglihatan/bahasa untuk tugasan robot, yang menunjukkan kemungkinan menyepadukan modul robot yang berbeza ke dalam model bersatu tunggal.
Walaupun model asas penglihatan dan bahasa mempunyai prospek yang menjanjikan dalam bidang robotik, dan model asas robot baharu juga sedang dibangunkan, masih terdapat banyak cabaran dalam bidang robotik yang sukar diselesaikan.
Dari perspektif penggunaan sebenar, model selalunya tidak boleh dihasilkan semula, tidak dapat digeneralisasikan kepada bentuk robot yang berbeza (pengertian berbilang jelmaan) atau sukar untuk memahami dengan tepat tingkah laku dalam persekitaran yang boleh dilaksanakan (atau boleh diterima) ). Di samping itu, kebanyakan kajian menggunakan seni bina berasaskan Transformer, memfokuskan pada persepsi semantik objek dan adegan, perancangan peringkat tugasan dan kawalan. Bahagian lain sistem robot kurang dipelajari, seperti model asas untuk dinamik dunia atau model asas yang boleh melakukan penaakulan simbolik. Ini memerlukan keupayaan generalisasi merentas domain.
Akhir sekali, kami juga memerlukan lebih banyak data dunia sebenar berskala besar dan simulator ketelitian tinggi yang menyokong pelbagai tugas robotik.
Kertas ulasan ini meringkaskan model asas yang digunakan dalam bidang robotik, dengan matlamat untuk memahami bagaimana model asas boleh membantu menyelesaikan atau mengurangkan cabaran teras dalam bidang robotik.
Dalam ulasan ini, istilah "model asas" yang digunakan oleh penyelidik merangkumi dua aspek bidang robotik: (1) model visual dan bahasa sedia ada utama, terutamanya melalui pukulan sifar dan Untuk mencapai ini melalui pembelajaran kontekstual; ) Gunakan data yang dijana oleh robot untuk membangunkan dan menggunakan model asas secara khusus untuk menyelesaikan tugasan robot. Para penyelidik merumuskan kaedah pada model asas dalam kertas yang berkaitan dan menjalankan meta-analisis pada hasil eksperimen kertas ini


Struktur keseluruhan kajian
Untuk membantu pembaca lebih memahami kandungan ulasan ini, pasukan terlebih dahulu menyediakan bahagian pengetahuan persediaan
Mereka akan memperkenalkan pengetahuan asas robotik dan teknologi terbaik semasa terlebih dahulu. Fokus utama di sini ialah kaedah yang digunakan dalam bidang robotik sebelum era model asas. Berikut adalah penjelasan ringkas, sila rujuk kertas asal untuk butiran.
- Komponen utama robot boleh dibahagikan kepada tiga bahagian: persepsi, membuat keputusan dan perancangan, dan penjanaan tindakan. Pasukan membahagikan persepsi robot kepada persepsi pasif, persepsi aktif dan anggaran keadaan.
- Dalam bahagian membuat keputusan dan perancangan robot, penyelidik memperkenalkan kaedah perancangan klasik dan kaedah perancangan berasaskan pembelajaran.
- Penjanaan tindakan mesin juga mempunyai kaedah kawalan klasik dan kaedah kawalan berasaskan pembelajaran.
Seterusnya, pasukan akan memperkenalkan model asas dan memberi tumpuan terutamanya pada bidang NLP dan CV Model yang terlibat termasuk: LLM, VLM, model asas visual dan model penjanaan imej bersyarat.
Cabaran dalam bidang robotik
Lima cabaran teras yang dihadapi oleh modul berbeza sistem robotik biasa. Rajah 3 menunjukkan klasifikasi lima cabaran ini.

Generalisasi
Sistem robot sering bergelut untuk mengesan dan memahami persekitarannya dengan tepat. Mereka juga tidak mempunyai keupayaan untuk menyamaratakan keputusan latihan pada satu tugasan kepada tugas yang lain, yang seterusnya mengehadkan kegunaannya dalam dunia sebenar. Di samping itu, disebabkan perkakasan robot yang berbeza, ia juga sukar untuk memindahkan model kepada bentuk robot yang berbeza. Masalah generalisasi boleh diselesaikan sebahagiannya dengan menggunakan model asas untuk robot. Soalan lanjut seperti generalisasi kepada bentuk robot yang berbeza masih perlu dijawab.
Kekurangan Data
Untuk membangunkan model robot yang boleh dipercayai, data berskala besar dan berkualiti tinggi adalah penting. Usaha sedang dijalankan untuk mengumpul set data berskala besar dari dunia nyata, termasuk pemanduan autonomi, trajektori operasi robot, dsb. Dan mengumpul data robot daripada demonstrasi manusia adalah mahal. Walau bagaimanapun, proses mengumpul data yang mencukupi dan meluas dalam dunia nyata semakin rumit oleh kepelbagaian tugas dan persekitaran. Terdapat juga kebimbangan keselamatan mengenai pengumpulan data di dunia nyata. Di samping itu, dalam dunia nyata, sangat sukar untuk mengumpul data secara besar-besaran, malah lebih sukar untuk mengumpul data imej/teks berskala Internet yang digunakan untuk melatih model asas.
Untuk menangani cabaran ini, banyak usaha penyelidikan telah cuba menjana data sintetik dalam persekitaran simulasi. Persekitaran simulasi ini boleh menyediakan dunia maya yang sangat realistik, membolehkan robot belajar dan menggunakan kemahiran mereka dalam situasi yang hampir dengan senario kehidupan sebenar. Walau bagaimanapun, terdapat beberapa batasan untuk menggunakan persekitaran simulasi, terutamanya dari segi kepelbagaian objek, yang menyukarkan untuk menggunakan kemahiran yang dipelajari secara langsung kepada situasi dunia sebenar
Satu pendekatan yang berpotensi besar ialah pengumpulan data kolaboratif, yang akan Data daripada persekitaran makmal yang berbeza dan jenis robot dikumpulkan bersama, seperti yang ditunjukkan dalam Rajah 4a. Walau bagaimanapun, pasukan itu melihat secara mendalam Set Data Penjelmaan Open-X dan mendapati terdapat beberapa batasan dari segi ketersediaan jenis data.

Keperluan model dan primitif
Kaedah perancangan dan kawalan klasik biasanya memerlukan model persekitaran dan robot yang direka dengan teliti. Kaedah berasaskan pembelajaran terdahulu (seperti pembelajaran tiruan dan pembelajaran pengukuhan) melatih dasar secara hujung ke hujung, iaitu mendapatkan output kawalan terus daripada input deria, sekali gus mengelakkan keperluan untuk membina dan menggunakan model. Kaedah ini sebahagiannya boleh menyelesaikan masalah bergantung pada model eksplisit, tetapi ia selalunya sukar untuk digeneralisasikan kepada persekitaran dan tugasan yang berbeza.
Ada dua masalah yang perlu diselesaikan: (1) Bagaimana untuk mempelajari strategi yang bebas model dan boleh membuat generalisasi dengan baik? (2) Bagaimana untuk mempelajari model dunia yang cemerlang untuk menggunakan kaedah berasaskan model klasik?
Spesifikasi Tugas
Untuk mencapai ejen tujuan am, cabaran utama adalah untuk memahami spesifikasi tugas dan membumikannya dalam pemahaman semasa robot tentang dunia. Biasanya, spesifikasi tugasan ini disediakan oleh pengguna, yang hanya mempunyai pemahaman terhad tentang batasan keupayaan kognitif dan fizikal robot. Ini menimbulkan banyak persoalan, termasuk amalan terbaik yang boleh disediakan untuk spesifikasi tugas ini, dan sama ada merangka spesifikasi ini adalah semula jadi dan cukup mudah. Ia juga mencabar untuk memahami dan menyelesaikan kekaburan dalam spesifikasi tugas berdasarkan pemahaman robot tentang keupayaannya.
Ketidakpastian dan Keselamatan
Untuk menggunakan robot di dunia nyata, cabaran utama ialah menangani ketidakpastian yang wujud dalam persekitaran dan spesifikasi tugas. Bergantung kepada sumber, ketidakpastian boleh dibahagikan kepada ketidakpastian epistemik (ketidakpastian yang disebabkan oleh kekurangan pengetahuan) dan ketidakpastian tidak sengaja (bunyi yang wujud dalam persekitaran).
Kos kuantifikasi ketidakpastian (UQ) mungkin sangat tinggi sehingga penyelidikan dan aplikasi tidak mampan, dan ia juga mungkin menghalang tugas hiliran daripada diselesaikan secara optimum. Memandangkan sifat model asas yang diparameterkan secara besar-besaran, untuk mencapai kebolehskalaan tanpa mengorbankan prestasi generalisasi model, adalah penting untuk menyediakan kaedah UQ yang mengekalkan skim latihan sambil mengubah seni bina asas sesedikit mungkin. Mereka bentuk robot yang boleh memberikan anggaran keyakinan yang boleh dipercayai tentang tingkah laku mereka sendiri dan, seterusnya, meminta maklum balas yang dinyatakan dengan jelas tetap menjadi cabaran yang tidak dapat diselesaikan.
Walaupun terdapat beberapa kemajuan baru-baru ini, memastikan robot mempunyai keupayaan untuk belajar daripada pengalaman untuk memperhalusi strategi mereka dan memastikan keselamatan dalam persekitaran baharu kekal mencabar.
Gambaran Keseluruhan Kaedah Penyelidikan Semasa
Artikel ini juga meringkaskan kaedah penyelidikan semasa untuk model asas robot. Pasukan itu membahagikan model asas yang digunakan dalam bidang robotik kepada dua kategori utama: model asas untuk robot dan kandungan yang ditulis semula: Model Asas Robot (RFM).
Model asas robot merujuk kepada penggunaan model asas penglihatan dan bahasa untuk robot secara sifar sampel tanpa penalaan halus atau latihan tambahan. Model asas robot boleh dimulakan secara hangat dengan pemulaan pra-latihan bahasa penglihatan, atau model boleh dilatih terus pada set data robot

Klasifikasi terperinci
model asas untuk robot
Bahagian ini ditulis semula seperti berikut: Bahagian ini memfokuskan pada mengaplikasikan model asas penglihatan dan bahasa kepada situasi tangkapan sifar dalam bidang robotik. Antaranya, ia termasuk menggunakan sampel sifar VLM ke dalam aplikasi persepsi robot, dan menggunakan keupayaan pembelajaran konteks LLM kepada perancangan dan penjanaan tindakan peringkat tugas dan peringkat gerakan. Rajah 6 menunjukkan beberapa kerja penyelidikan tipikal

Apa yang ditulis semula ialah: Model Asas Robot (RFM)

-Dengan robot yang mengandungi set data sebenar berkembang, penulisan semula ialah kategori Model Asasi Robotik (RFM) juga semakin berkemungkinan berjaya. Model ini menampilkan penggunaan data robotik untuk melatih model menyelesaikan tugasan robotik.
Pasukan penyelidik merumuskan pelbagai jenis RFM dalam perbincangan. Yang pertama ialah RFM yang mampu melaksanakan tugas tertentu dalam modul robot tunggal, juga dikenali sebagai model asas robot objektif tunggal. Contohnya, keupayaan untuk menjana RFM yang mengawal tindakan peringkat rendah robot atau model yang boleh menjana perancangan gerakan peringkat lebih tinggi. Artikel itu juga memperkenalkan RFM yang boleh melaksanakan tugas dalam berbilang modul robot, iaitu model universal yang boleh melaksanakan persepsi, kawalan, dan juga tugasan bukan robotik
Apakah peranan yang dimainkan oleh model asas dalam menyelesaikan cabaran robotik?
Artikel sebelum ini menyenaraikan lima cabaran utama yang dihadapi dalam bidang robotik. Di sini kami menerangkan cara model asas boleh membantu menangani cabaran ini.
Semua model asas yang berkaitan dengan maklumat visual (seperti VFM, VLM dan VGM) boleh digunakan dalam modul persepsi robot. LLM, sebaliknya, lebih serba boleh dan boleh digunakan untuk perancangan dan kawalan. Kandungan yang ditulis semula ialah: Model asas robot (RFM) biasanya digunakan dalam modul perancangan dan penjanaan tindakan. Jadual 1 meringkaskan model asas untuk menyelesaikan cabaran robotik yang berbeza.

Seperti yang dapat dilihat dari jadual, semua model asas boleh menyamaratakan tugas modul robot yang berbeza dengan baik. Khususnya, LLM berprestasi baik dalam spesifikasi tugas. RFM, sebaliknya, pandai menangani cabaran model dinamik, kerana kebanyakan RFM adalah kaedah bebas model. Untuk keupayaan persepsi robot, keupayaan generalisasi dan cabaran model adalah saling berkaitan. Jika model persepsi sudah mempunyai keupayaan generalisasi yang baik, maka tidak perlu mendapatkan lebih banyak data untuk penyesuaian domain atau penalaan halus tambahan
Selain itu, terdapat kekurangan penyelidikan tentang cabaran keselamatan, yang akan menjadi masa depan yang penting Arah penyelidikan.
Ikhtisar Eksperimen dan Penilaian Semasa
Bahagian ini meringkaskan hasil penyelidikan semasa tentang set data, penanda aras dan eksperimen.
Set Data dan Penanda Aras
Terdapat had untuk bergantung semata-mata pada pengetahuan yang dipelajari daripada set data bahasa dan visual. Seperti yang ditunjukkan oleh beberapa hasil penyelidikan, beberapa konsep seperti geseran dan berat tidak boleh dipelajari dengan mudah melalui modaliti ini sahaja.
Oleh itu, untuk membolehkan ejen robotik memahami dunia dengan lebih baik, komuniti penyelidik bukan sahaja menyesuaikan model asas daripada domain bahasa dan penglihatan, tetapi juga memajukan pembangunan robot pelbagai mod yang besar dan pelbagai untuk melatih dan memperhalusi ini. set data.
Pada masa ini usaha ini boleh dibahagikan kepada dua arah utama: dalam satu pihak, mengumpul data dari dunia nyata, dan sebaliknya, mengumpul data dari dunia simulasi dan memindahkannya ke dunia nyata. Setiap arah ada kelebihan dan kekurangannya. Set data yang dikumpul dari dunia nyata termasuk RoboNet, Bridge Dataset V1, Bridge-V2, Language-Table, RT-1, dsb. Simulator yang biasa digunakan termasuk Habitat, AI2THOR, Mujoco, AirSim, Simulator Perlumbaan Autonomi Ketibaan, Gim Issac, dll. meta-analisis eksperimen dalam kertas kerja yang dinyatakan dalam laporan ulasan ini boleh membantu menjelaskan soalan berikut:
1.
2. Apakah set data atau simulator yang digunakan untuk melatih model? Apakah platform robot yang digunakan untuk ujian?3. Apakah model asas yang digunakan oleh komuniti penyelidik? Sejauh manakah keberkesanannya dalam menyelesaikan tugasan?
4. Model asas manakah yang lebih biasa digunakan antara kaedah ini?
Jadual 2-7 dan Rajah 11 menunjukkan keputusan analisis. .
Perhatian komuniti penyelidik terhadap tugas pengendalian robot (Manipulasi) adalah tidak seimbang Kekerapan kawalan terlalu rendah (
Ketiadaan tanda aras ujian bersatu (Metrik) dan platform ujian (Simulasi atau Perkakasan) menjadikan perbandingan sangat sukar.
Perbincangan dan hala tuju masa depan
Pasukan merumuskan beberapa cabaran yang masih perlu diselesaikan dan menyelidik arahan yang patut dibincangkan:
Bagaimana untuk menetapkan asas pembumian standard untuk penjelmaan robot
Keselamatan dan Ketidakpastian?
Adakah kaedah hujung ke hujung dan modular tidak serasi?
- Penyesuaian kepada perubahan fizikal yang terkandung
- Keupayaan
- Kaedah Model Dunia atau kaedah bebas model?
- Platform robotik baharu dan maklumat pelbagai deriaTeruskan Pembelajaran
- Penstandardan dan kebolehulangan (Kebolehulangan)
Atas ialah kandungan terperinci Kajian mendedahkan model asas dan laluan pembangunan robot. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

 从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM
从VAE到扩散模型:一文解读以文生图新范式Apr 08, 2023 pm 08:41 PM1 前言在发布DALL·E的15个月后,OpenAI在今年春天带了续作DALL·E 2,以其更加惊艳的效果和丰富的可玩性迅速占领了各大AI社区的头条。近年来,随着生成对抗网络(GAN)、变分自编码器(VAE)、扩散模型(Diffusion models)的出现,深度学习已向世人展现其强大的图像生成能力;加上GPT-3、BERT等NLP模型的成功,人类正逐步打破文本和图像的信息界限。在DALL·E 2中,只需输入简单的文本(prompt),它就可以生成多张1024*1024的高清图像。这些图像甚至
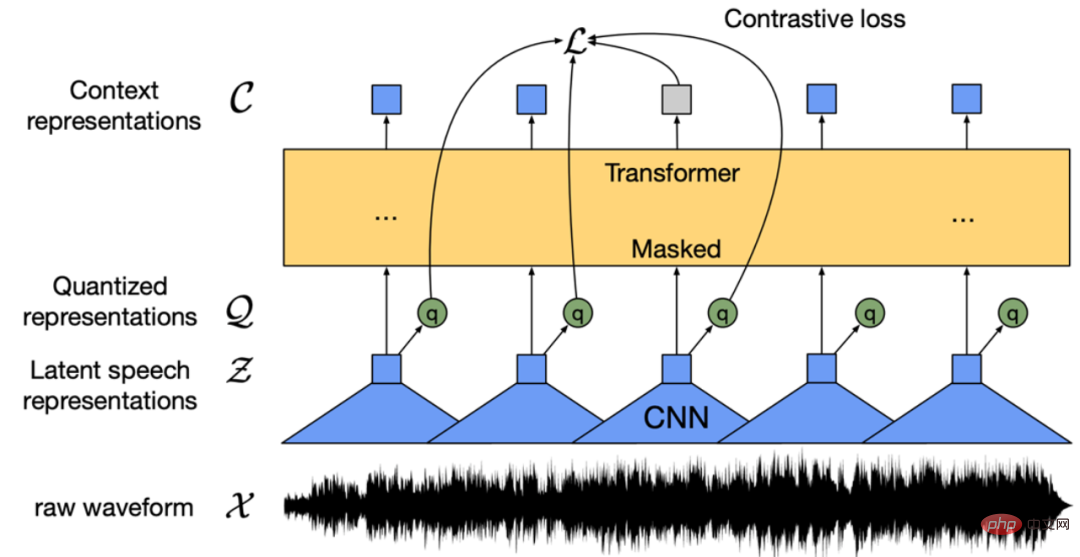 找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PM
找不到中文语音预训练模型?中文版 Wav2vec 2.0和HuBERT来了Apr 08, 2023 pm 06:21 PMWav2vec 2.0 [1],HuBERT [2] 和 WavLM [3] 等语音预训练模型,通过在多达上万小时的无标注语音数据(如 Libri-light )上的自监督学习,显著提升了自动语音识别(Automatic Speech Recognition, ASR),语音合成(Text-to-speech, TTS)和语音转换(Voice Conversation,VC)等语音下游任务的性能。然而这些模型都没有公开的中文版本,不便于应用在中文语音研究场景。 WenetSpeech [4] 是
 普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM
普林斯顿陈丹琦:如何让「大模型」变小Apr 08, 2023 pm 04:01 PM“Making large models smaller”这是很多语言模型研究人员的学术追求,针对大模型昂贵的环境和训练成本,陈丹琦在智源大会青源学术年会上做了题为“Making large models smaller”的特邀报告。报告中重点提及了基于记忆增强的TRIME算法和基于粗细粒度联合剪枝和逐层蒸馏的CofiPruning算法。前者能够在不改变模型结构的基础上兼顾语言模型困惑度和检索速度方面的优势;而后者可以在保证下游任务准确度的同时实现更快的处理速度,具有更小的模型结构。陈丹琦 普
 解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM
解锁CNN和Transformer正确结合方法,字节跳动提出有效的下一代视觉TransformerApr 09, 2023 pm 02:01 PM由于复杂的注意力机制和模型设计,大多数现有的视觉 Transformer(ViT)在现实的工业部署场景中不能像卷积神经网络(CNN)那样高效地执行。这就带来了一个问题:视觉神经网络能否像 CNN 一样快速推断并像 ViT 一样强大?近期一些工作试图设计 CNN-Transformer 混合架构来解决这个问题,但这些工作的整体性能远不能令人满意。基于此,来自字节跳动的研究者提出了一种能在现实工业场景中有效部署的下一代视觉 Transformer——Next-ViT。从延迟 / 准确性权衡的角度看,
 Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM
Stable Diffusion XL 现已推出—有什么新功能,你知道吗?Apr 07, 2023 pm 11:21 PM3月27号,Stability AI的创始人兼首席执行官Emad Mostaque在一条推文中宣布,Stable Diffusion XL 现已可用于公开测试。以下是一些事项:“XL”不是这个新的AI模型的官方名称。一旦发布稳定性AI公司的官方公告,名称将会更改。与先前版本相比,图像质量有所提高与先前版本相比,图像生成速度大大加快。示例图像让我们看看新旧AI模型在结果上的差异。Prompt: Luxury sports car with aerodynamic curves, shot in a
 五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM
五年后AI所需算力超100万倍!十二家机构联合发表88页长文:「智能计算」是解药Apr 09, 2023 pm 07:01 PM人工智能就是一个「拼财力」的行业,如果没有高性能计算设备,别说开发基础模型,就连微调模型都做不到。但如果只靠拼硬件,单靠当前计算性能的发展速度,迟早有一天无法满足日益膨胀的需求,所以还需要配套的软件来协调统筹计算能力,这时候就需要用到「智能计算」技术。最近,来自之江实验室、中国工程院、国防科技大学、浙江大学等多达十二个国内外研究机构共同发表了一篇论文,首次对智能计算领域进行了全面的调研,涵盖了理论基础、智能与计算的技术融合、重要应用、挑战和未来前景。论文链接:https://spj.scien
 什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM
什么是Transformer机器学习模型?Apr 08, 2023 pm 06:31 PM译者 | 李睿审校 | 孙淑娟近年来, Transformer 机器学习模型已经成为深度学习和深度神经网络技术进步的主要亮点之一。它主要用于自然语言处理中的高级应用。谷歌正在使用它来增强其搜索引擎结果。OpenAI 使用 Transformer 创建了著名的 GPT-2和 GPT-3模型。自从2017年首次亮相以来,Transformer 架构不断发展并扩展到多种不同的变体,从语言任务扩展到其他领域。它们已被用于时间序列预测。它们是 DeepMind 的蛋白质结构预测模型 AlphaFold
 AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM
AI模型告诉你,为啥巴西最可能在今年夺冠!曾精准预测前两届冠军Apr 09, 2023 pm 01:51 PM说起2010年南非世界杯的最大网红,一定非「章鱼保罗」莫属!这只位于德国海洋生物中心的神奇章鱼,不仅成功预测了德国队全部七场比赛的结果,还顺利地选出了最终的总冠军西班牙队。不幸的是,保罗已经永远地离开了我们,但它的「遗产」却在人们预测足球比赛结果的尝试中持续存在。在艾伦图灵研究所(The Alan Turing Institute),随着2022年卡塔尔世界杯的持续进行,三位研究员Nick Barlow、Jack Roberts和Ryan Chan决定用一种AI算法预测今年的冠军归属。预测模型图


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

SublimeText3 Linux versi baharu
SublimeText3 Linux versi terkini

PhpStorm versi Mac
Alat pembangunan bersepadu PHP profesional terkini (2018.2.1).

Muat turun versi mac editor Atom
Editor sumber terbuka yang paling popular

Penyesuai Pelayan SAP NetWeaver untuk Eclipse
Integrasikan Eclipse dengan pelayan aplikasi SAP NetWeaver.

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

