

 Peranti teknologiAIRobot DeepMind Google telah mengeluarkan tiga keputusan berturut-turut! Kedua-dua keupayaan telah dipertingkatkan, dan sistem pengumpulan data boleh menguruskan 20 robot pada masa yang sama.
Peranti teknologiAIRobot DeepMind Google telah mengeluarkan tiga keputusan berturut-turut! Kedua-dua keupayaan telah dipertingkatkan, dan sistem pengumpulan data boleh menguruskan 20 robot pada masa yang sama.
Hampir pada masa yang sama dengan robot "Udang Goreng dan Pencuci Pinggan" Stanford, Google DeepMind turut mengeluarkan keputusan kecerdasan terkandung terkininya. . - cepat Pada masa yang sama, kualiti tidak merosot, dan ketepatan telah meningkat sebanyak 10.6%.
Kemudian terdapat rangka kerja baharu mengkhususkan diri dalam keupayaan generalisasi
, yang boleh mencipta gesaan trajektori gerakan untuk robot, membolehkannya menghadapi 41 tugasan yang tidak pernah dilihat sebelum ini dan mencapai kejayaan 63%.
Jangan memandang rendah array ini, Berbanding dengan 29% sebelum ini, peningkatannya agak besar
Berbanding dengan 29% sebelum ini, peningkatannya agak besar
. Yang terakhir ialah sistem pengumpulan data robot
, yang boleh mengurus 20 robot pada satu masa 77,000 data percubaan telah dikumpulkan daripada aktiviti mereka setakat ini. 
Jadi, apakah ketiga-tiga keputusan ini secara khusus? Mari kita lihat mereka satu persatu. Langkah pertama dalam aplikasi harian robot: anda boleh terus melaksanakan tugas yang belum pernah anda lihat sebelum ini
Google menegaskan bahawa untuk merealisasikan robot yang benar-benar boleh memasuki dunia nyata, dua cabaran asas perlu diselesaikan. 1. Keupayaan promosi tugas baharu2. Tingkatkan kelajuan membuat keputusan
Dua keputusan pertama siri tiga bahagian ini terutamanya penambahbaikan dalam kedua-dua bidang ini, dan kedua-duanya adalah berdasarkan model robot asas Google Transformer (( Disingkatkan sebagai RT)
(( Disingkatkan sebagai RT)
Secara umumnya, cara tradisional ialah memetakan tugasan ke dalam tindakan tertentu, dan kemudian biarkan lengan robot menyelesaikannya. Contohnya, mengelap meja boleh dipecahkan kepada "tutup pengapit, gerak ke kiri dan gerak ke kanan. "
Jelas sekali, keupayaan generalisasi kaedah ini sangat lemah.Di sini, RT-Trajectory yang baru dicadangkan oleh Google mengajar robot untuk menyelesaikan tugasan dengan memberikannya isyarat visual.
Secara khusus, robot yang dikawal oleh RT-Trajectory akan menambah data trajektori 2D yang dipertingkatkan semasa latihan.
Trajektori ini dipersembahkan sebagai imej RGB, termasuk laluan dan titik penting, memberikan petunjuk tahap rendah tetapi sangat berguna semasa robot belajar melaksanakan tugas.
Dengan model ini, kadar kejayaan robot yang melakukan tugasan yang tidak pernah dilihat sebelum ini telah meningkat secara langsung sebanyak 1 kali ganda
(berbanding model robot asas Google RT-2, daripada 29% => 63%).
Apa yang lebih patut disebut ialah RT-Trajektori boleh mencipta trajektori dalam pelbagai cara, termasuk:
dengan menonton demonstrasi manusia, menerima lakaran lukisan tangan dan dihasilkan oleh VLM(Model Bahasa Visual)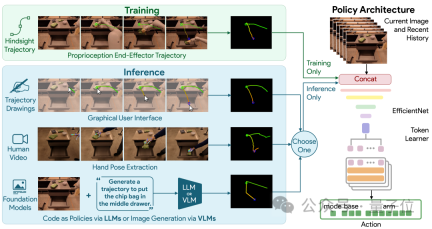 .
.
Selepas keupayaan generalisasi dipertingkatkan, kami akan menumpukan pada kelajuan membuat keputusan.
Model RT Google menggunakan seni bina Transformer Walaupun Transformer berkuasa, ia sangat bergantung pada modul perhatian dengan kerumitan kuadratik.
Oleh itu, sebaik sahaja input kepada model RT digandakan (contohnya, melengkapkan robot dengan sensor resolusi lebih tinggi) , sumber pengiraan yang diperlukan untuk memprosesnya akan meningkat kepada empat kali ganda, yang akan melambatkan keputusan secara serius -membuat kelajuan.
Untuk meningkatkan kelajuan robot, Google membangunkan 
SARA-RT menggunakan kaedah penalaan halus model baharu untuk menjadikan model RT asal lebih cekap.
Kaedah ini dipanggil "up training" oleh Google Fungsi utamanya adalah untuk menukar kerumitan kuadratik asal kepada kerumitan linear sambil mengekalkan kualiti pemprosesan.
Apabila SARA-RT digunakan pada model RT-2 dengan berbilion parameter, yang terakhir boleh mencapai kelajuan operasi yang lebih pantas dan ketepatan yang lebih tinggi pada pelbagai tugas.
Perlu disebut juga bahawa SARA-RT menyediakan kaedah universal untuk mempercepatkan Transformer tanpa latihan pra yang mahal, jadi ia boleh dipromosikan dengan baik.
Data tidak mencukupi? Cipta sendiri
Akhir sekali, untuk membantu robot lebih memahami tugas yang diberikan oleh manusia, Google juga bermula dengan data dan membina terus sistem pengumpulan: AutoRT.
Sistem ini menggabungkan model besar (termasuk LLM dan VLM) dengan model kawalan robot (RT) untuk terus mengarahkan robot melaksanakan pelbagai tugas di dunia nyata, dengan itu menjana dan mengumpul data.
Proses khusus adalah seperti berikut:
Biarkan robot "bebas" menghubungi persekitaran dan mendekati sasaran.
Kemudian gunakan kamera dan model VLM untuk menerangkan pemandangan di hadapan anda, termasuk item tertentu.
Kemudian, LLM menggunakan maklumat ini untuk menjana beberapa tugasan yang berbeza.
Sila ambil perhatian bahawa selepas dijana, robot tidak akan dilaksanakan serta-merta, Sebaliknya, LLM akan digunakan untuk menapistugas mana yang boleh diselesaikan secara bebas, mana yang memerlukan alat kawalan jauh manusia dan yang mana tidak boleh diselesaikan. semua.
Apa yang tidak boleh dilakukan ialah "membuka beg kerepek kentang" kerana memerlukan dua lengan robot (1 sahaja secara lalai) .

Kemudian, selepas menyelesaikan tugas saringan ini, robot sebenarnya boleh melaksanakannya.
Akhir sekali, sistem AutoRT melengkapkan pengumpulan data dan menjalankan penilaian kepelbagaian.
Menurut laporan, AutoRT boleh menyelaraskan sehingga 20 robot pada satu masa Dalam 7 bulan, sejumlah 77,000 data ujian termasuk 6,650 tugasan unik telah dikumpulkan.
Akhir sekali, untuk sistem ini, Google turut menitikberatkan keselamatan.
Lagipun, tugas pengumpulan AutoRT terpakai kepada dunia sebenar, dan "pengadang keselamatan" amat diperlukan.
Secara khusus, Kod Keselamatan Asas, yang disediakan oleh LLM yang menyaring robot untuk tugasan, sebahagiannya diilhamkan oleh Tiga Undang-undang Robotik Isaac Asimov - pertama sekali "Sebuah robot tidak boleh membahayakan manusia."
Keperluan kedua ialah bahawa robot tidak boleh mencuba tugas yang melibatkan manusia, haiwan, objek tajam atau peralatan elektrik
Tetapi ini tidak mencukupi
Jadi AutoRT juga dilengkapi dengan pelbagai lapisan langkah keselamatan praktikal dalam robotik biasa Sebagai contoh, robot secara automatik berhenti apabila daya pada sendinya melebihi ambang tertentu, semua tindakan boleh dihentikan oleh suis fizikal yang kekal dalam penglihatan manusia, dan banyak lagi
 Ingin mengetahui lebih lanjut tentang kumpulan hasil terbaharu daripada Google ini
Ingin mengetahui lebih lanjut tentang kumpulan hasil terbaharu daripada Google ini
Berita baik, kecuali untuk RT-Trajectory, yang hanya menerbitkan kertas kerja, selebihnya diterbitkan bersama kod dan kertas kerja Selamat datang semua orang untuk menyemaknya~
One More Thing
Bercakap tentang robot Google, kita perlu menyebut
RT-2. (Semua hasil artikel ini juga dibina di atas) Model ini mengambil masa 54 penyelidik Google dalam masa 7 bulan untuk dibina dan dikeluarkan pada penghujung Julai tahun ini
Ia membenamkan model berbilang modal teks visual VLM . , bukan sahaja boleh memahami "perkataan manusia", tetapi juga boleh membuat alasan tentang "perkataan manusia" dan melaksanakan beberapa tugas yang tidak dapat diselesaikan dalam satu langkah, seperti mengambil "haiwan pupus" dengan tepat daripada tiga mainan plastik: singa, ikan paus, dan dinosaur. ", sangat menakjubkan.
 Hari ini, ia telah mengalami peningkatan pesat dalam keupayaan generalisasi dan kelajuan membuat keputusan dalam masa lebih dari 5 bulan. Kami tidak boleh mengeluh: Saya tidak dapat membayangkan bahawa robot akan benar-benar tergesa-gesa ke dunia Seberapa pantas ia akan berlaku untuk beribu-ribu isi rumah?
Hari ini, ia telah mengalami peningkatan pesat dalam keupayaan generalisasi dan kelajuan membuat keputusan dalam masa lebih dari 5 bulan. Kami tidak boleh mengeluh: Saya tidak dapat membayangkan bahawa robot akan benar-benar tergesa-gesa ke dunia Seberapa pantas ia akan berlaku untuk beribu-ribu isi rumah?
Atas ialah kandungan terperinci Robot DeepMind Google telah mengeluarkan tiga keputusan berturut-turut! Kedua-dua keupayaan telah dipertingkatkan, dan sistem pengumpulan data boleh menguruskan 20 robot pada masa yang sama.. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

 Skop Gemma: Mikroskop Google ' s untuk mengintip ke proses pemikiran AI 'Apr 17, 2025 am 11:55 AM
Skop Gemma: Mikroskop Google ' s untuk mengintip ke proses pemikiran AI 'Apr 17, 2025 am 11:55 AMMeneroka kerja -kerja dalam model bahasa dengan skop Gemma Memahami kerumitan model bahasa AI adalah satu cabaran penting. Pelepasan Google Gemma Skop, Toolkit Komprehensif, menawarkan penyelidik cara yang kuat untuk menyelidiki
 Siapa penganalisis perisikan perniagaan dan bagaimana menjadi satu?Apr 17, 2025 am 11:44 AM
Siapa penganalisis perisikan perniagaan dan bagaimana menjadi satu?Apr 17, 2025 am 11:44 AMMembuka Kejayaan Perniagaan: Panduan untuk Menjadi Penganalisis Perisikan Perniagaan Bayangkan mengubah data mentah ke dalam pandangan yang boleh dilakukan yang mendorong pertumbuhan organisasi. Ini adalah kuasa penganalisis Perniagaan Perniagaan (BI) - peranan penting dalam GU
 Bagaimana untuk menambah lajur dalam SQL? - Analytics VidhyaApr 17, 2025 am 11:43 AM
Bagaimana untuk menambah lajur dalam SQL? - Analytics VidhyaApr 17, 2025 am 11:43 AMPernyataan Jadual Alter SQL: Menambah lajur secara dinamik ke pangkalan data anda Dalam pengurusan data, kebolehsuaian SQL adalah penting. Perlu menyesuaikan struktur pangkalan data anda dengan cepat? Pernyataan Jadual ALTER adalah penyelesaian anda. Butiran panduan ini menambah colu
 Penganalisis Perniagaan vs Penganalisis DataApr 17, 2025 am 11:38 AM
Penganalisis Perniagaan vs Penganalisis DataApr 17, 2025 am 11:38 AMPengenalan Bayangkan pejabat yang sibuk di mana dua profesional bekerjasama dalam projek kritikal. Penganalisis perniagaan memberi tumpuan kepada objektif syarikat, mengenal pasti bidang penambahbaikan, dan memastikan penjajaran strategik dengan trend pasaran. Simu
 Apakah Count dan Counta dalam Excel? - Analytics VidhyaApr 17, 2025 am 11:34 AM
Apakah Count dan Counta dalam Excel? - Analytics VidhyaApr 17, 2025 am 11:34 AMPengiraan dan Analisis Data Excel: Penjelasan terperinci mengenai fungsi Count dan Counta Pengiraan dan analisis data yang tepat adalah kritikal dalam Excel, terutamanya apabila bekerja dengan set data yang besar. Excel menyediakan pelbagai fungsi untuk mencapai matlamat ini, dengan fungsi Count dan CountA menjadi alat utama untuk mengira bilangan sel di bawah keadaan yang berbeza. Walaupun kedua -dua fungsi digunakan untuk mengira sel, sasaran reka bentuk mereka disasarkan pada jenis data yang berbeza. Mari menggali butiran khusus fungsi Count dan Counta, menyerlahkan ciri dan perbezaan unik mereka, dan belajar cara menerapkannya dalam analisis data. Gambaran keseluruhan perkara utama Memahami kiraan dan cou
 Chrome ada di sini dengan AI: mengalami sesuatu yang baru setiap hari !!Apr 17, 2025 am 11:29 AM
Chrome ada di sini dengan AI: mengalami sesuatu yang baru setiap hari !!Apr 17, 2025 am 11:29 AMRevolusi AI Google Chrome: Pengalaman melayari yang diperibadikan dan cekap Kecerdasan Buatan (AI) dengan cepat mengubah kehidupan seharian kita, dan Google Chrome mengetuai pertuduhan di arena pelayaran web. Artikel ini meneroka exciti
 Sisi Manusia Ai ' s: Kesejahteraan dan garis bawah empat kali gandaApr 17, 2025 am 11:28 AM
Sisi Manusia Ai ' s: Kesejahteraan dan garis bawah empat kali gandaApr 17, 2025 am 11:28 AMImpak Reimagining: garis bawah empat kali ganda Selama terlalu lama, perbualan telah dikuasai oleh pandangan sempit kesan AI, terutama memberi tumpuan kepada keuntungan bawah. Walau bagaimanapun, pendekatan yang lebih holistik mengiktiraf kesalinghubungan BU
 5 Kes Pengkomputeran Kuantum Mengubah Permainan Yang Harus Anda KetahuiApr 17, 2025 am 11:24 AM
5 Kes Pengkomputeran Kuantum Mengubah Permainan Yang Harus Anda KetahuiApr 17, 2025 am 11:24 AMPerkara bergerak terus ke arah itu. Pelaburan yang dicurahkan ke dalam penyedia perkhidmatan kuantum dan permulaan menunjukkan bahawa industri memahami kepentingannya. Dan semakin banyak kes penggunaan dunia nyata muncul untuk menunjukkan nilainya


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

SecLists
SecLists ialah rakan penguji keselamatan muktamad. Ia ialah koleksi pelbagai jenis senarai yang kerap digunakan semasa penilaian keselamatan, semuanya di satu tempat. SecLists membantu menjadikan ujian keselamatan lebih cekap dan produktif dengan menyediakan semua senarai yang mungkin diperlukan oleh penguji keselamatan dengan mudah. Jenis senarai termasuk nama pengguna, kata laluan, URL, muatan kabur, corak data sensitif, cangkerang web dan banyak lagi. Penguji hanya boleh menarik repositori ini ke mesin ujian baharu dan dia akan mempunyai akses kepada setiap jenis senarai yang dia perlukan.

Pelayar Peperiksaan Selamat
Pelayar Peperiksaan Selamat ialah persekitaran pelayar selamat untuk mengambil peperiksaan dalam talian dengan selamat. Perisian ini menukar mana-mana komputer menjadi stesen kerja yang selamat. Ia mengawal akses kepada mana-mana utiliti dan menghalang pelajar daripada menggunakan sumber yang tidak dibenarkan.

Muat turun versi mac editor Atom
Editor sumber terbuka yang paling popular

MinGW - GNU Minimalis untuk Windows
Projek ini dalam proses untuk dipindahkan ke osdn.net/projects/mingw, anda boleh terus mengikuti kami di sana. MinGW: Port Windows asli bagi GNU Compiler Collection (GCC), perpustakaan import yang boleh diedarkan secara bebas dan fail pengepala untuk membina aplikasi Windows asli termasuk sambungan kepada masa jalan MSVC untuk menyokong fungsi C99. Semua perisian MinGW boleh dijalankan pada platform Windows 64-bit.

Dreamweaver CS6
Alat pembangunan web visual

