
Rumah >Peranti teknologi >AI >MapEX di luar SOTA: Peningkatan prestasi yang menakjubkan dan teknologi persepsi tanpa peta
MapEX di luar SOTA: Peningkatan prestasi yang menakjubkan dan teknologi persepsi tanpa peta

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2024-01-10 22:06:221260semak imbas
Ditulis sebelum & pemahaman peribadi penulis
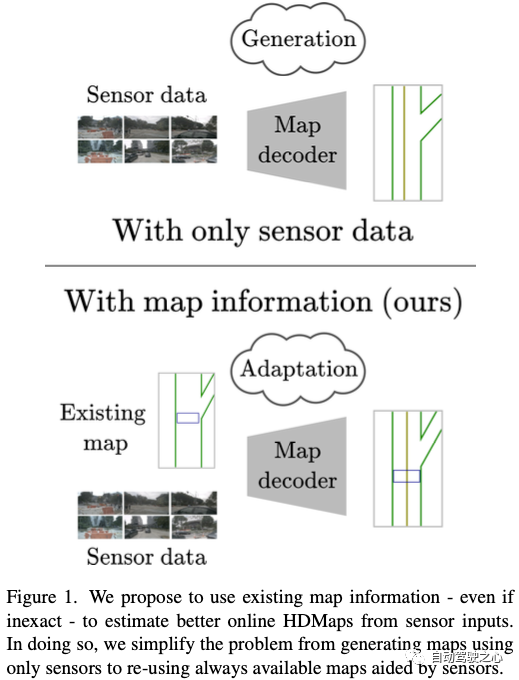
Selepas membaca artikel ini, adakah anda akan mempunyai ilusi bahawa persepsi tanpa gambar telah berakhir? ? ? MapEX yang baru dikeluarkan tidak sabar untuk menyerap intipati gelombang artikel dan berkongsi dengan semua orang. Teras MapEX adalah menggunakan maklumat peta yang disimpan secara sejarah untuk mengoptimumkan pembinaan peta berketepatan tinggi tempatan semasa Peta sejarah boleh menjadi peta dengan hanya beberapa elemen peta mudah (seperti sempadan jalan) atau peta dengan hingar (seperti. sisihan setiap elemen peta). bergerak 5m), atau ia boleh menjadi peta lama (contohnya, hanya sebahagian kecil daripada elemen peta boleh diselaraskan dengan pemandangan semasa). Jelas sekali, maklumat peta sejarah ini berguna untuk pembinaan peta berketepatan tinggi tempatan semasa, yang juga membawa kepada teras artikel ini, iaitu bagaimana untuk menggunakannya? ? ? Khususnya, MapEX dibina berdasarkan MapTRv2 Maklumat peta sejarah ini boleh dikodkan ke dalam satu siri pertanyaan dan disambungkan bersama-sama dengan pertanyaan asal, dan penyahkod selanjutnya mengeluarkan hasil ramalan. Artikel itu masih sangat menarik~
Tinjauan keseluruhan kertas
Peta ketepatan tinggi (HDMap) dalam talian yang dijana oleh sensor dianggap sebagai alternatif kos rendah kepada pemerolehan manual HDMap, jadi ia dijangka mengurangkan kos sistem pemanduan autonomi yang bergantung pada HDMap , dan ia juga mungkin untuk digunakan pada sistem baharu.
Kertas kerja ini mencadangkan kaedah untuk menambah baik anggaran HDMap dalam talian dengan mempertimbangkan peta sedia ada untuk pengoptimuman. Dalam kajian itu, penulis mengenal pasti tiga jenis peta sedia ada yang munasabah, termasuk peta mudah, peta bising dan peta lama. Selain itu, kertas kerja ini memperkenalkan rangka kerja bangunan HDMap dalam talian baharu yang dipanggil MapEX untuk mengesan peta sedia ada. MapEX mencapai matlamat ini dengan mengekodkan elemen peta sebagai pertanyaan dan memperbaik algoritma padanan model anggaran peta berasaskan pertanyaan klasik.
Artikel akhirnya menunjukkan peningkatan ketara MapEX pada set data nuScenes. Contohnya, MapEX (diberikan peta bising) bertambah baik sebanyak 38% berbanding pengesanan MapTRv2 dan 16% lebih baik daripada keadaan terkini.
Ringkasnya, sumbangan utama MapEX boleh diringkaskan seperti berikut:
- Mengambil kira maklumat peta sedia ada semasa menganggarkan HDMaps dalam talian daripada data penderia
- Membincangkan kes munasabah di mana peta sedia ada tidak lengkap. Kami juga menyediakan pelaksanaan praktikal dan kod untuk adegan ini untuk set data nuScenes
- Memperkenalkan MapEX, skim pemerolehan HDMap berasaskan pertanyaan baharu yang boleh menggabungkan maklumat peta semasa menganggarkan HDMap dalam talian daripada penderia. Khususnya, cara baharu untuk menggabungkan maklumat peta sedia ada dengan pertanyaan sedia ada (EX) diperkenalkan dalam MapEX, serta cara untuk membantu model belajar mengeksploitasi maklumat ini dengan mengaitkan ramalan kepada GT semasa latihan.
Semakan kerja pembinaan peta berketepatan tinggi tempatan dalam talian
Di sini, kami menggariskan secara ringkas beberapa kandungan tentang peta berketepatan tinggi (HDMaps) dalam pemanduan autonomi. Mula-mula, kami meneroka penggunaan HDMap dalam ramalan trajektori, dan kemudian kami bercakap tentang cara mendapatkan data peta ini. Akhir sekali, kami membincangkan proses pembinaan HDMap dalam talian.
HDMaps untuk Ramalan Trajektori: Pemanduan autonomi selalunya memerlukan sejumlah besar maklumat tentang dunia tempat kenderaan itu menavigasi. Maklumat ini selalunya dibenamkan dalam HDMaps yang kaya dan berfungsi sebagai input untuk mengubah suai rangkaian saraf. HDMaps telah terbukti kritikal kepada prestasi ramalan trajektori. Terutamanya dalam ramalan trajektori, beberapa kaedah secara jelas berdasarkan perwakilan HDMap, jadi akses kepada HDMap sangat diperlukan.
Pemerolehan dan penyelenggaraan HDMap: Kos pemerolehan dan penyelenggaraan HDMap tradisional adalah tinggi. Walaupun HDMaps yang digunakan dalam peramalan hanyalah versi ringkas yang mengandungi elemen peta (pemisah lorong, sempadan jalan, dll.) dan menyediakan banyak maklumat kompleks yang terdapat dalam HDMaps penuh, mereka masih memerlukan ukuran yang sangat tepat. Akibatnya, banyak syarikat telah bergerak ke arah piawaian yang kurang ketat untuk peta definisi sederhana (MDMaps) atau malah ke arah peta navigasi (Peta Google, SDMaps). Yang penting, MDMap dengan ketepatan beberapa meter akan menjadi contoh yang baik bagi peta sedia ada, memberikan maklumat berharga untuk proses penjanaan HDMap dalam talian. Senario peta 2a kami meneroka anggaran keadaan ini.
Pembinaan penderia HDMap dalam talian: Jadi pembinaan HDMap dalam talian telah menjadi teras kepada persepsi imej ringan/tanpa imej. Walaupun sesetengah kerja memfokuskan pada meramalkan elemen peta maya, iaitu, garis tengah lorong, sesetengah kerja memfokuskan pada elemen peta yang boleh dikenal pasti secara visual: pembahagi lorong, sempadan jalan dan persimpangan. Mungkin kerana elemen visual lebih mudah dikesan oleh penderia, pendekatan yang terakhir telah mencapai kemajuan pesat sepanjang tahun lalu. Menariknya, kaedah terbaharu sedemikian, Map-TRv2, menyediakan tetapan tambahan untuk mengesan garis tengah lorong sebenar. Ini menunjukkan penumpuan kepada skema yang lebih kompleks, termasuk sejumlah besar elemen peta tambahan (lampu isyarat, dsb.).
Kerja kertas ini adalah serupa dengan masalah pengesanan perubahan yang biasa dikaji, yang bertujuan untuk mengesan perubahan (cth. persimpangan) dalam peta. Matlamat MapEX adalah untuk menjana HDMap dalam talian yang tepat dengan bantuan peta sedia ada (mungkin sangat berbeza), yang dicapai untuk masalah semasa pembinaan HDMap dalam talian. Oleh itu, kami bukan sahaja membetulkan ralat kecil dalam peta, tetapi juga mencadangkan rangka kerja yang lebih ekspresif yang boleh menampung sebarang perubahan (cth. garisan herot, unsur yang sangat bising).
Apakah peta sedia ada yang boleh kita gunakan?
Cadangan teras kami ialah memanfaatkan peta sedia ada akan memudahkan pembinaan HDMaps dalam talian. Kami percaya bahawa terdapat banyak keadaan yang sah di mana peta tidak sempurna mungkin timbul.
Perwakilan HDMap dalam talian
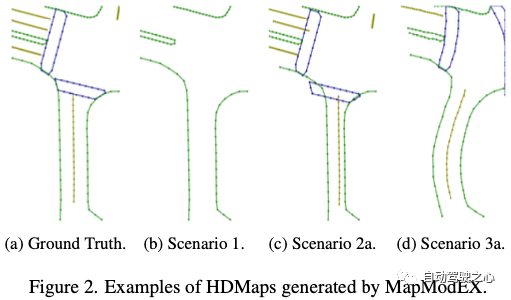
Kami mengguna pakai format standard untuk penjanaan dalam talian HDMaps daripada penderia: Kami percaya HDMaps terdiri daripada 3 jenis polylines, sempadan jalan, pemisah lorong dan lintasan, yang warnanya berbeza daripada sebelumnya. hijau dan kelabu batu masing-masing Sama seperti biru, seperti yang ditunjukkan dalam Rajah 2a.
Walaupun HDMaps sebenar jauh lebih kompleks dan representasi yang lebih canggih telah dicadangkan, tujuan kerja ini adalah untuk menyiasat cara mentafsir maklumat peta sedia ada. Oleh itu, kami menggunakan paradigma yang paling banyak dikaji. Kerja kertas ini akan digunakan secara langsung untuk ramalan lebih banyak elemen peta, garis poli lebih halus atau sasaran raster.
MapModEX: Mensimulasikan Peta Tidak Sempurna
Memandangkan pemerolehan untuk peta standard adalah mahal dan memakan masa, kami menghasilkan peta tidak tepat secara sintetik daripada HDMaps sedia ada.
Untuk tujuan ini kami membangunkan MapModEX, perpustakaan pengubahsuaian peta bebas. Ia mengambil fail peta nuScenes dan rekod sampel dan output untuk setiap sampel koordinat garisan poli bagi kaki lima, sempadan dan lintasan dalam tampalan tertentu di sekeliling kenderaan ego. Yang penting, MapModEX menyediakan keupayaan untuk mengubah suai polylines ini untuk mencerminkan pelbagai pengubahsuaian: pemadaman elemen peta, penambahan, pergerakan lintasan, penambahan hingar ke koordinat titik, pergerakan peta, putaran peta dan herotan peta. MapModEX akan tersedia selepas dikeluarkan untuk memudahkan pencarian semula peta sedia ada ke dalam pemerolehan HDMap dalam talian sensor.
Kami melaksanakan tiga senario mencabar menggunakan pakej MapModEX, seperti yang diterangkan di bawah, menjana 10 varian senario 2 dan 3 untuk setiap sampel (senario 1 hanya membenarkan satu varian). Kami memilih untuk menggunakan set tetap peta yang diubah suai untuk mengurangkan kos semasa latihan dan menggambarkan situasi dunia sebenar di mana hanya sebilangan terhad varian peta mungkin tersedia.
Senario 1: Hanya sempadan yang tersedia
Senario pertama ialah hanya HDMap kasar (tanpa pembahagi dan lintasan) tersedia, seperti yang ditunjukkan dalam Rajah 2b. Sempadan jalan sering dikaitkan dengan tanda tempat fizikal 3D seperti tepi kaki lima, manakala laluan pejalan kaki dan lintasan sering diwakili oleh penanda rata yang lebih mudah dilepaskan. Selain itu, pejalan kaki dan pembahagi lorong sering dibuang kerana kerja pembinaan atau penyelewengan jalan, atau malah sebahagiannya tersembunyi oleh trek tayar.
Jadi masuk akal untuk menggunakan HDMaps dengan sempadan sahaja. Kelebihannya ialah ia hanya memerlukan pelabelan kekangan jalan, yang boleh mengurangkan kos pelabelan. Selain itu, mengesan hanya sempadan jalan mungkin memerlukan peralatan dan kemas kini yang kurang tepat. Pelaksanaan Dari sudut praktikal, pelaksanaan senario 1 adalah mudah: kami mengalih keluar pembahagi dan lintasan daripada HDMaps yang tersedia.
Senario 2: Peta Bising
Senario kedua yang mungkin ialah kita hanya mempunyai peta yang sangat bising, seperti yang ditunjukkan dalam Rajah 2c. Satu kelemahan HDMaps sedia ada ialah keperluan untuk ketepatan yang tinggi (berurutan beberapa sentimeter), yang memberi tekanan besar pada pemerolehan dan penyelenggaraannya [11]. Malah, perbezaan utama antara HDMaps dan standard MDMaps yang muncul ialah ketepatan yang lebih rendah (beberapa sentimeter berbanding beberapa meter).
Oleh itu, kami mengesyorkan menggunakan HDMaps yang bising untuk mensimulasikan situasi di mana peta yang kurang tepat mungkin disebabkan oleh proses pemerolehan yang lebih murah atau sebaliknya menggunakan standard MMDaps. Lebih menarik ialah peta yang kurang tepat ini boleh diperoleh secara automatik daripada data sensor. Walaupun kaedah seperti MapTRv2 telah mencapai prestasi yang sangat mengagumkan, kaedah tersebut masih belum tepat sepenuhnya: walaupun dengan ambang perolehan yang sangat fleksibel, ketepatan ramalan adalah di bawah 80%.
Pelaksanaan: Kami mencadangkan dua kemungkinan pelaksanaan HDMaps yang bising ini untuk menggambarkan pelbagai keadaan di mana kami mungkin kurang ketepatan. Dalam senario pertama 2a, kami mencadangkan persediaan hingar mengimbangi, di mana untuk setiap kedudukan elemen peta kami menambah hingar daripada taburan Gaussian dengan sisihan piawai 1 meter. Ini mempunyai kesan menggunakan terjemahan seragam pada setiap elemen peta (pembahagi, sempadan, lintasan). Persediaan sedemikian harus memberikan anggaran yang baik tentang keadaan di mana anotasi manusia dengan cepat memberikan anotasi yang tidak tepat daripada data yang bising. Kami memilih sisihan piawai 1 meter untuk mencerminkan piawaian MMDaps tepat kepada beberapa meter.
Kami kemudiannya menguji kaedah kami pada senario hingar 2b yang sangat mencabar: untuk setiap titik kebenaran tanah - ingat, elemen peta terdiri daripada 20 titik sedemikian - kami mulakan dengan sisihan piawai Sampel hingar daripada taburan Gaussian 5 meter dan tambahkannya pada koordinat titik. Ini memberikan anggaran kes terburuk untuk situasi di mana peta memperoleh atau memberikan kedudukan yang sangat tidak tepat secara automatik.
Senario 3: Peta telah berubah dengan ketara
Senario terakhir yang kami pertimbangkan ialah di mana kami mempunyai akses kepada peta lama yang tepat pada masa lalu (lihat Rajah 2d). Ia adalah perkara biasa untuk tanda cat seperti persimpangan untuk beralih dari semasa ke semasa. Di samping itu, bandar ini telah mengubah suai dengan ketara beberapa persimpangan bermasalah atau kawasan yang diubah suai untuk menampung peningkatan trafik yang dijana oleh tarikan baharu.
Jadi, seronok bekerja dengan HDMaps, ia adalah sah dengan hak mereka sendiri tetapi tidak sama dengan HDMaps sebenar secara besar-besaran. Apabila HDMaps hanya dikemas kini setiap beberapa tahun oleh penyelenggara untuk mengurangkan kos, peta ini sepatutnya tersedia dengan kerap. Dalam kes ini, peta sedia ada masih akan memberikan beberapa maklumat tentang dunia, tetapi mungkin tidak menggambarkan perubahan sementara atau terkini.
Pelaksanaan: Kami menganggarkan ini dengan membuat perubahan yang mantap pada HDMaps sedia ada dalam senario 3a. Kami mengalih keluar 50% pejalan kaki dan pembahagi lorong dalam peta, menambah beberapa pejalan kaki (separuh daripada baki pejalan kaki) dan akhirnya menggunakan ledingan kecil pada peta.
Walau bagaimanapun, adalah penting untuk ambil perhatian bahawa sebahagian besar peta global akan kekal tidak berubah dari semasa ke semasa. Kami mengira ini dalam senario 3b kami, di mana kami mengkaji kesan memilih secara rawak (dengan kebarangkalian p = 0.5) untuk mempertimbangkan HDMap sebenar dan bukannya versi yang terganggu.
MapEX: Menggunakan peta sedia ada
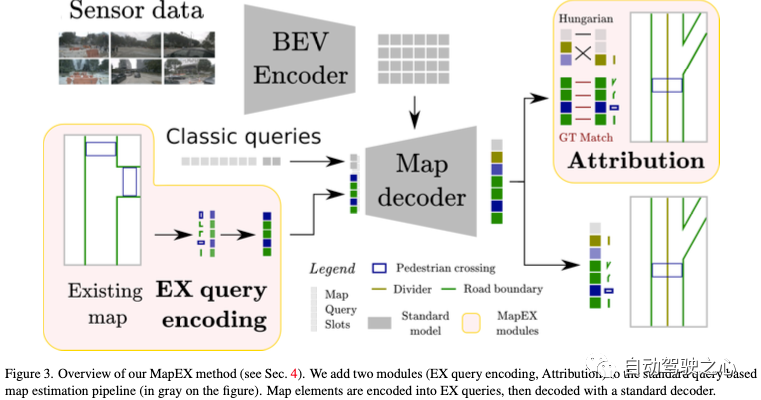
Untuk tujuan ini kami mencadangkan MapEX (lihat Rajah 3), rangka kerja baharu untuk pembinaan HDMap dalam talian. Ia mengikuti paradigma pembinaan HDMap dalam talian berasaskan pertanyaan standard dan memproses maklumat peta sedia ada melalui dua modul utama: modul pengekodan pertanyaan peta dan ramalan dan skema pra-atribusi GT. Artikel ini membina garis dasar berdasarkan MapTRv2.
Ikhtisar
Inti berasaskan pertanyaan ditunjukkan oleh unsur kelabu dalam Rajah 3. Ia mula-mula mengambil input penderia (kamera atau lidar) dan mengekodnya ke dalam perwakilan Pandangan Mata Burung (BEV) sebagai ciri penderia. Gunakan skema pengesanan seperti DETR untuk mengesan elemen peta (sehingga N) untuk mendapatkan peta itu sendiri. Ini dicapai dengan menghantar token pertanyaan N×L yang dipelajari (N ialah bilangan maksimum unsur yang dikesan, L ialah bilangan mata yang diramalkan untuk elemen) ke dalam penyahkod Transformer, yang menggunakan ciri BEV yang sama seperti Penderia suapan perhatian silang maklumat kepada token pertanyaan. Pertanyaan yang dinyahkod kemudiannya diubah menjadi koordinat elemen peta melalui lapisan linear bersama-sama dengan ramalan kelas (termasuk kelas latar belakang tambahan), supaya kumpulan pertanyaan L mewakili titik L unsur peta (L=20 dalam kertas ini). Latihan dilakukan dengan memadankan elemen peta ramalan dan elemen peta GT menggunakan beberapa varian algoritma Hungary. Setelah dipadankan, model dioptimumkan supaya elemen peta yang diramalkan sepadan dengan GT yang ia bertindak balas, menggunakan kehilangan regresi (untuk koordinat) dan klasifikasi (untuk kategori elemen).
Tetapi rangka kerja ini tidak boleh mentafsir peta sedia ada, yang memerlukan pengenalan modul baharu pada dua peringkat utama. Pada peringkat pertanyaan, kami mengekod elemen peta ke dalam pertanyaan EX yang tidak boleh dipelajari. Pada tahap padanan, kami menambah atribut pertanyaan kepada elemen peta GT yang diwakilinya.
Rangka kerja MapEX yang lengkap (ditunjukkan dalam Rajah 3) menukar elemen peta sedia ada kepada pertanyaan peta yang tidak boleh dipelajari dan menambah pertanyaan yang boleh dipelajari untuk mencapai bilangan pertanyaan N×L tertentu. Set pertanyaan lengkap ini kemudiannya dihantar kepada penyahkod Transformer dan diubah menjadi ramalan melalui lapisan linear seperti biasa. Semasa latihan, model atribusi kami telah memadankan beberapa ramalan kepada GT dan ramalan yang selebihnya dipadankan secara lazim menggunakan padanan Hungary. Pada masa ujian, pertanyaan bukan latar belakang yang dinyahkod menghasilkan perwakilan HDMap.
Tukar peta kepada pertanyaan EX
Tiada mekanisme dalam rangka kerja pembinaan HDMap dalam talian semasa untuk mentafsir maklumat peta sedia ada. Oleh itu, kita perlu mereka bentuk skema baharu yang boleh menterjemah peta sedia ada ke dalam bentuk yang boleh difahami oleh rangka kerja pembinaan HDMap dalam talian berasaskan pertanyaan standard. Kami mencadangkan kaedah mudah menggunakan MapEX untuk mengekod elemen peta sedia ada ke dalam pertanyaan EX untuk penyahkod, seperti yang ditunjukkan dalam Rajah 4.
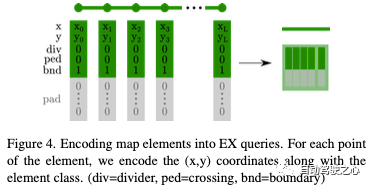
Untuk elemen peta tertentu, kami mengekstrak L titik jarak yang sama, dengan L ialah bilangan titik yang kami ingin ramalkan untuk sebarang elemen peta. Untuk setiap titik kami membuat pertanyaan EX yang mengekod koordinat petanya (x,y) dalam 2 dimensi pertama dan kelas elemen peta (pembahagi, persimpangan atau sempadan) dalam 3 dimensi seterusnya Lakukan pengekodan sekali. Baki pertanyaan EX dilapisi dengan 0s untuk mencapai saiz pertanyaan standard yang digunakan oleh seni bina penyahkod.
Walaupun reka bentuk pertanyaan ini sangat mudah, ia memberikan faedah utama pengekodan terus maklumat yang diminati (koordinat titik dan kelas elemen) dan meminimumkan konflik dengan pertanyaan yang dipelajari (terima kasih kepada padding kaya 0) .
Setelah kami mempunyai set pertanyaan L (untuk elemen peta dalam peta sedia ada), kami boleh mendapatkan ( ) set pertanyaan boleh dipelajari kategori L daripada kumpulan pertanyaan boleh dipelajari standard. Kemudian, mengikut kaedah artikel ini, pertanyaan N×L yang dijana disalurkan kepada penyahkod: dalam MapTR, pertanyaan N×L dianggap sebagai pertanyaan bebas, manakala MapTRv2 menggunakan skema perhatian decoupled yang lebih berkesan untuk menggabungkan elemen peta yang sama. pertanyaan dikumpulkan bersama. Selepas meramalkan elemen peta daripada pertanyaan, ia boleh digunakan terus pada masa ujian atau ia boleh dipadankan dengan GT terlatih.
Atribusi elemen peta
Sementara pertanyaan EX memperkenalkan cara untuk mentafsir maklumat peta sedia ada, tiada apa-apa untuk memastikan model menggunakan pertanyaan ini dengan betul untuk menganggarkan elemen yang sepadan. Malah, jika digunakan secara bersendirian, rangkaian tidak dapat mengenali pertanyaan EX yang tepat sepenuhnya. Oleh itu, kami memperkenalkan pra-atribusi ramalan dan elemen GT sebelum menggunakan padanan tradisional Hungary dalam latihan, seperti yang ditunjukkan dalam Rajah 3.
Ringkasnya, kami menjejaki setiap elemen peta dalam peta yang diubah suai, elemen peta GT yang mana ia sepadan: jika elemen peta tidak diubah suai, diimbangi atau diherotkan, kami boleh membandingkannya dengan elemen peta asal dalam peta sebenar Hubungi. Untuk memastikan model belajar menggunakan maklumat yang berguna sahaja, kami hanya mengekalkan padanan pada min skor anjakan mengikut titik antara elemen peta yang diubah suai dan elemen peta sebenar:

Antara GT tertentu dan pra-ramalan elemen peta Surat-menyurat, kita boleh mengalih keluar elemen peta pra-atribut daripada kumpulan elemen untuk dipadankan. Unsur peta yang tinggal (diramalkan dan GT) kemudiannya dipadankan menggunakan beberapa variasi algoritma Hungary, seperti biasa. Oleh itu, langkah padanan Hungary hanya perlu mengenal pasti pertanyaan EX yang sepadan dengan elemen peta tambahan yang tidak wujud dan mencari pertanyaan standard yang dipelajari yang sesuai dengan beberapa elemen peta sebenar yang tidak wujud dalam peta sebenar (disebabkan oleh pemadaman atau gangguan yang kuat) .
Mengurangkan bilangan elemen yang perlu diproses oleh algoritma Hungary adalah penting kerana varian yang paling cekap pun mempunyai kerumitan padu ()[8]. Ini bukanlah kelemahan utama kebanyakan kaedah pemerolehan HDMap dalam talian semasa, kerana peta yang diramalkan adalah kecil (30m × 60m) dan hanya tiga jenis elemen peta yang diramalkan. Walau bagaimanapun, apabila penjanaan peta dalam talian berkembang lebih jauh, ia menjadi perlu untuk menampung bilangan elemen peta yang semakin meningkat apabila peta ramalan menjadi lebih besar dan lebih lengkap.
Hasil eksperimen
Persediaan: Kami menilai rangka kerja MapEX pada set data nuScenes kerana ia adalah set data penilaian standard untuk anggaran HDMap dalam talian. Kami berdasarkan rangka kerja MapTRv2 dan pangkalan kod rasmi. Mengikuti amalan biasa, kami melaporkan purata ketepatan untuk tiga jenis elemen peta (pembahagi, sempadan, lintasan) pada ambang perolehan yang berbeza (0.5m, 1.0m dan 1.5m jarak chamfer), serta mAP untuk tiga kategori.
Bagi setiap eksperimen, 3 eksperimen telah dijalankan menggunakan tiga biji benih rawak tetap. Yang penting, untuk kombinasi benih dan pemandangan peta yang diberikan, data peta sedia ada yang disediakan semasa pengesahan ditetapkan untuk memudahkan perbandingan. Untuk ketekalan, kami melaporkan hasil sebagai min ± sisihan piawai, ke titik perpuluhan terdekat, walaupun sisihan piawai melebihi ketepatan ini.
Prestasi MapEX
Kami menyediakan perbandingan kaedah yang berkaitan dalam Jadual 2, serta prestasi MapEX: peta tanpa pembahagi lorong atau rentas pejalan kaki (S1), peta dengan hingar (S2a untuk elemen peta mengimbangi , S2b untuk bunyi bising yang kuat) dan sebahagian besarnya berubah peta (S3a mengandungi hanya peta ini, S3b mengandungi peta sebenar bercampur). Kami membandingkan secara menyeluruh prestasi MapEX dengan penilaian HDMap dalam talian sedia ada pada tetapan setanding (input kamera, tulang belakang CNN) dan dengan terkini terkini (yang menggunakan lebih banyak sumber).
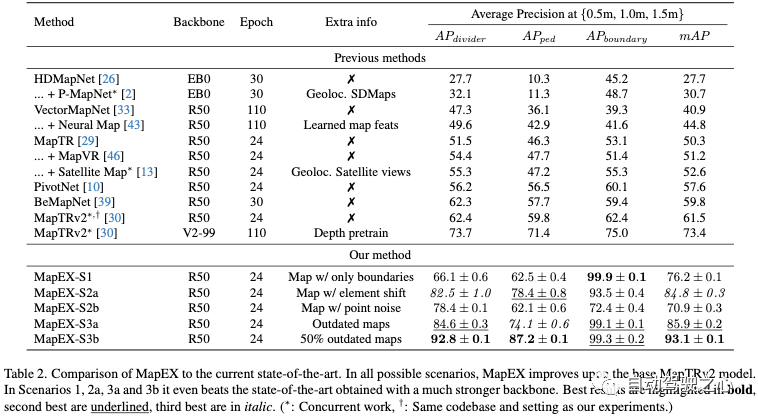
Pertama, jelas daripada Jadual 2 bahawa sebarang jenis maklumat peta sedia ada menjadikan MapEX mengatasi prestasi literatur sedia ada dengan ketara dalam tetapan setanding, tanpa mengira senario yang dipertimbangkan. Dalam semua kecuali satu kes, maklumat peta sedia ada malah membenarkan MapEX berprestasi lebih baik daripada model terkini MapTRv2, yang menggunakan tulang belakang ViT besar yang dipralatih pada set data anggaran kedalaman yang luas dalam empat Latihan dalam dua kali lebih banyak tempoh. . Malah senario S2a yang agak konservatif dengan kedudukan elemen peta yang tidak tepat mendapat peningkatan skor 11.4mAP (iaitu 16%).
Merentasi semua senario, kami melihat peningkatan yang konsisten terhadap model asas MapTRv2 pada semua 4 metrik. Difahamkan, senario 3b (menggunakan peta sedia ada yang tepat separuh masa) menghasilkan prestasi keseluruhan terbaik dengan margin yang besar, menunjukkan keupayaan kukuh untuk mengenal pasti dan mengeksploitasi peta sedia ada yang tepat sepenuhnya. Kedua-dua Senario 2a (dengan elemen peta mengimbangi) dan Senario 3a (dengan elemen peta "lapuk") memberikan prestasi keseluruhan yang sangat kuat, dengan prestasi yang baik untuk ketiga-tiga jenis elemen peta Dalam Senario 1 terdapat hanya jalan Sempadan yang tersedia, menunjukkan besar Keuntungan mAP disebabkan oleh pengambilan semula sempadan yang sangat berkuasa (dijangkakan), walaupun dalam senario 2b yang sangat mencabar, di mana hingar Gaussian dengan sisihan piawai 5 meter digunakan pada setiap titik elemen peta Terdapat juga keuntungan yang ketara ke atas model asas. dengan prestasi perolehan yang sangat baik untuk pembatas dan sempadan
Peningkatan yang dibawa ke MapEX
Kami kini memfokuskan lebih khusus pada apa yang dibawa oleh maklumat peta sedia ada kepada MapEX Sebagai rujukan, kami membandingkan keuntungan MapEX dengan yang dibawa oleh sumber lain maklumat tambahan: Peta Neural Sebelum dengan peta ciri yang dipelajari secara global, dan P-MapNet menggunakan SDMaps geo-lokal bergantung pada model asas yang lebih kukuh daripada kaedah ini, walaupun ini menjadikannya lebih sukar untuk menambah baik model asas, tetapi juga lebih mudah untuk dilakukan. mendapatkan skor tinggi. Untuk mengelakkan kelebihan yang tidak adil, skor mutlak disediakan dalam Jadual 3.
Kami melihat daripada Jadual 3 bahawa menggunakan MapEX dengan sebarang jenis peta sedia ada menghasilkan keuntungan keseluruhan mAP yang lebih besar daripada mana-mana sumber maklumat tambahan lain (termasuk persediaan P-MapNet yang lebih kompleks). Kami melihat model ini dalam prestasi Pengesanan pada kedua-dua pemisah dan sempadan jalan. sempadan, tetapi hanya apabila tiada maklumat sebelumnya Crosswalks memberikan penambahbaikan yang setanding dengan kaedah sebelumnya pada kedua-dua elemen peta Nampaknya maklumat yang lebih tepat daripada peta sedia ada diperlukan, kerana senario 1 dan 2b (menggunakan bunyi yang sangat merosakkan pada setiap titik peta. ) hanya boleh dicapai. Memberikan peningkatan yang setanding dengan teknik sedia ada (elemen diubah) dan senario 3a (peta "lapuk") menghasilkan markah pengesanan lintasan yang tinggi, mungkin kerana kedua-dua senario ini mengandungi maklumat lintasan yang lebih tepat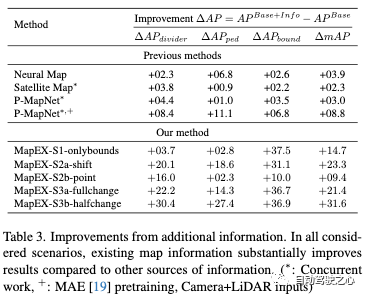
Sumbangan Input MapEX
Jadual 4 menunjukkan cara jenis input yang berbeza (peta sedia ada, surat-menyurat elemen peta dan input penderia) mempengaruhi prestasi MapEX 🜜🜜🜜🜜🜜🜜 dengan ketara.
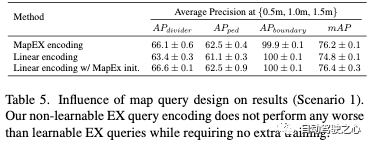
Jadual 5 menunjukkan bahawa pertanyaan EX yang dipelajari menunjukkan prestasi yang jauh lebih buruk daripada pertanyaan EX yang tidak boleh dipelajari. Menariknya, pertanyaan EX yang boleh dipelajari dimulakan dengan pertanyaan EX yang tidak boleh dipelajari mungkin membawa peningkatan yang sangat kecil yang tidak membenarkan kerumitan tambahan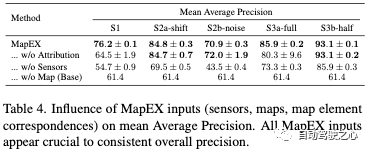
Perbincangan
Artikel ini mencadangkan memanfaatkan peta sedia ada untuk menambah baik pembinaan HDMap dalam talian. Untuk menyiasat perkara ini, penulis menggariskan tiga senario realistik di mana peta sedia ada (mudah, bising atau ketinggalan zaman) tersedia dan memperkenalkan rangka kerja MapEX baharu untuk mengeksploitasi peta ini. Memandangkan tiada mekanisme dalam rangka kerja semasa untuk mengambil kira peta sedia ada, kami membangunkan dua modul baharu: satu untuk mengekod elemen peta ke dalam pertanyaan EX dan satu lagi untuk memastikan model menggunakan pertanyaan ini.
Hasil eksperimen menunjukkan bahawa peta sedia ada mewakili maklumat penting untuk pembinaan HDMap dalam talian dan bahawa MapEX meningkatkan kaedah yang setanding dengan ketara dalam semua kes. Malah, dari segi mAP - Senario 2a dengan elemen peta yang bergerak secara rawak - ia bertambah baik sebanyak 38% berbanding model asas MapTRv2 dan sebanyak 16% berbanding tercanggih semasa.
Kami berharap kerja ini akan membawa kepada kaedah pembinaan HDMap dalam talian baharu untuk mentafsir maklumat sedia ada. Peta sedia ada, baik atau buruk, tersedia secara meluas. Mengabaikan mereka adalah melepaskan alat utama dalam mencari binaan HDMap dalam talian yang boleh dipercayai.

Pautan asal: https://mp.weixin.qq.com/s/FMosLZ2VJVRyeCOzKl-GLw
Atas ialah kandungan terperinci MapEX di luar SOTA: Peningkatan prestasi yang menakjubkan dan teknologi persepsi tanpa peta. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!