
Rumah >Peranti teknologi >AI >Pasukan China memenangi anugerah kertas terbaik dan kertas sistem terbaik, dan keputusan penyelidikan CoRL diumumkan.
Pasukan China memenangi anugerah kertas terbaik dan kertas sistem terbaik, dan keputusan penyelidikan CoRL diumumkan.

- 王林ke hadapan
- 2023-11-10 14:21:21823semak imbas
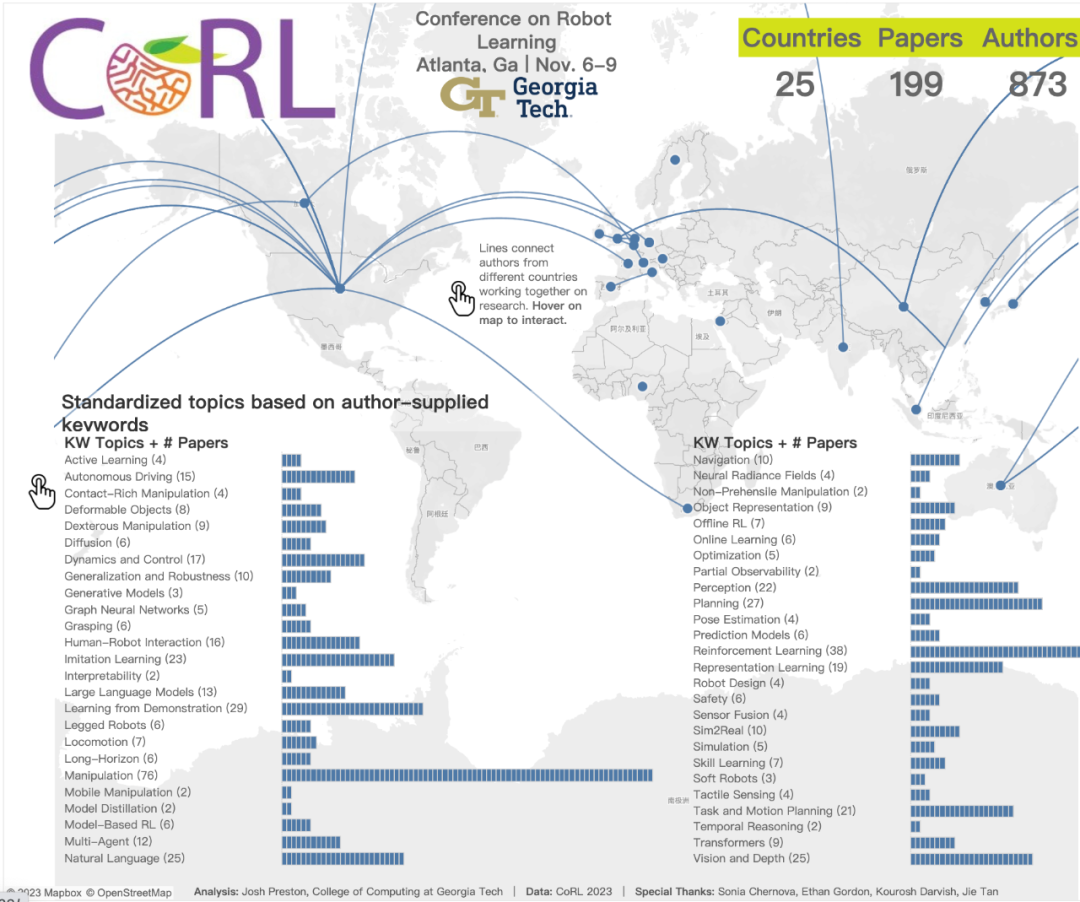
Sejak pertama kali diadakan pada 2017, CoRL telah menjadi salah satu persidangan akademik terbaik dunia dalam persimpangan robotik dan pembelajaran mesin. CoRL ialah persidangan tema tunggal untuk penyelidikan pembelajaran robot, meliputi pelbagai topik seperti robotik, pembelajaran mesin dan kawalan, termasuk teori dan aplikasi
Persidangan CoRL 2023 akan diadakan di Atlanta, Amerika Syarikat dari 6 hingga 9 November yang diadakan. Menurut data rasmi, 199 kertas kerja dari 25 negara telah dipilih untuk CoRL tahun ini. Topik popular termasuk operasi, pembelajaran pengukuhan dan banyak lagi. Walaupun CoRL berskala lebih kecil daripada persidangan akademik AI yang besar seperti AAAI dan CVPR, memandangkan populariti konsep seperti model besar, kecerdasan terkandung dan robot humanoid meningkat tahun ini, penyelidikan berkaitan yang patut diberi perhatian juga akan dibentangkan pada persidangan CoRL . . Seterusnya, kami akan memperkenalkan kertas-kertas pemenang anugerah ini kepada anda.
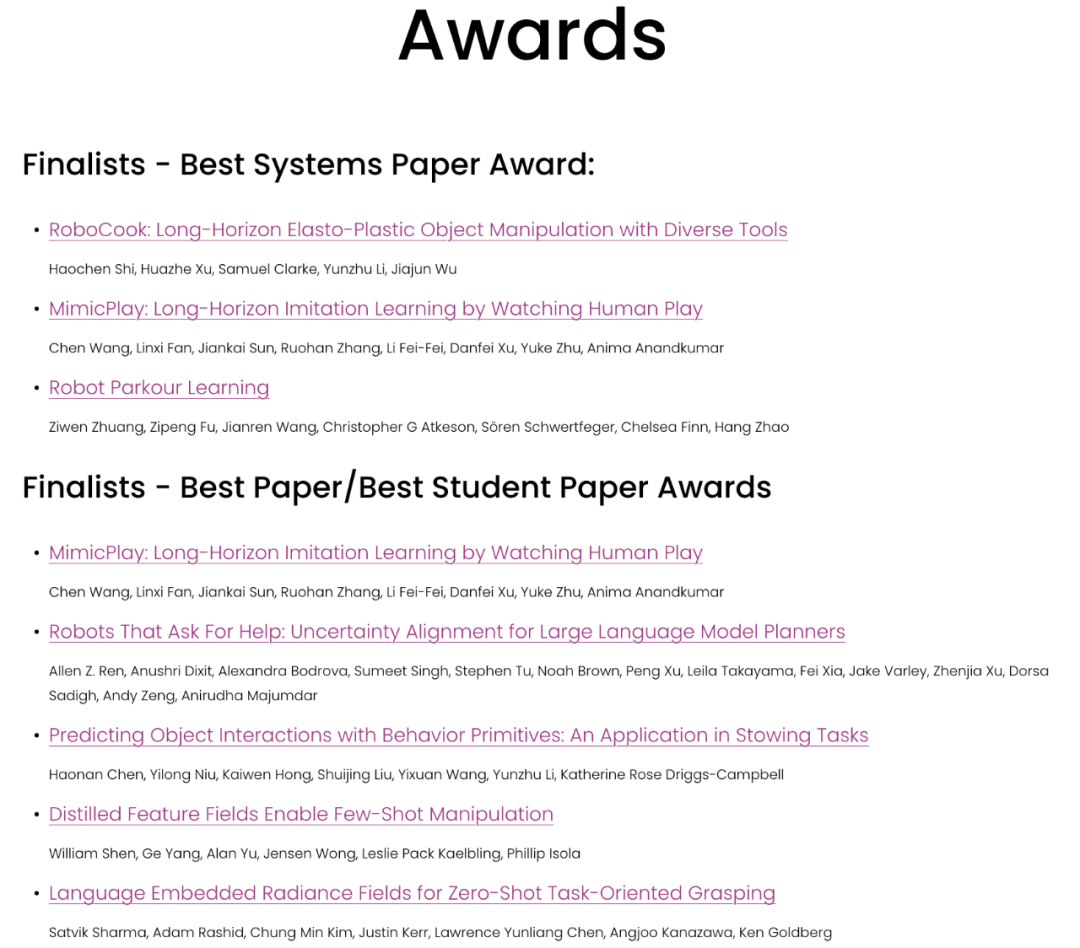
 Kertas Terbaik
Kertas Terbaik
Kertas: Medan Ciri Suling Membolehkan Manipulasi Berpandukan Bahasa Sedikit Tangkapan
- Institusi: MIT CSAIL, IAIFI
- Alamat kertas: https://openreview.net/forum?id=Rb0nGIt_kh5
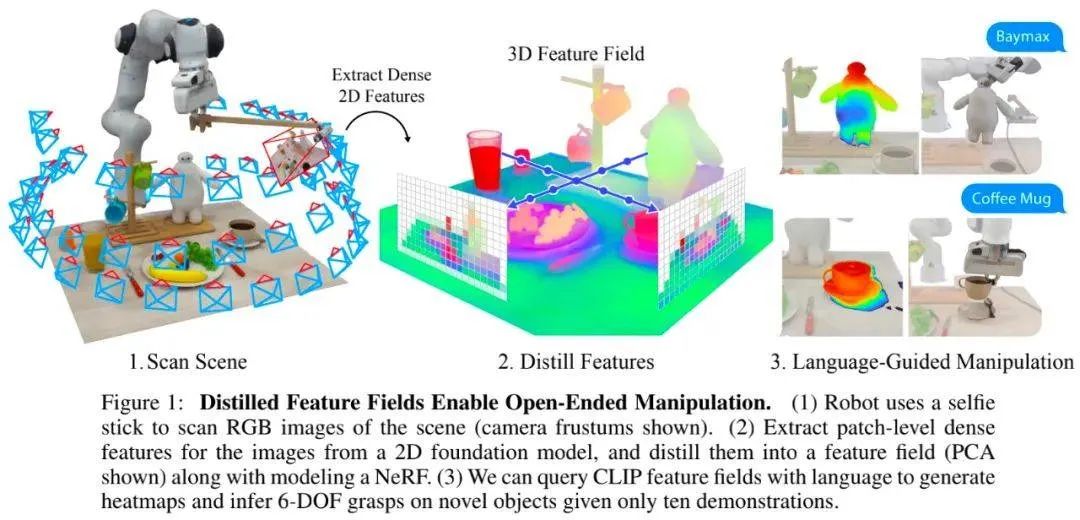
- Gambaran keseluruhan pembelajaran kendiri dan pembelajaran di bawah seliaan bahasa telah menggabungkan pengetahuan global yang kaya, yang penting kepada keupayaan model untuk membuat generalisasi. Walau bagaimanapun, ciri imej hanya mengandungi maklumat dua dimensi. Kami mengetahui bahawa dalam tugas robotik, adalah sangat penting untuk mempunyai sedikit pemahaman tentang geometri objek tiga dimensi dunia sebenar
Secara khusus, penyelidikan ini Kaedah pembelajaran beberapa pukulan untuk 6- Pegang dan peletakan DOF dicadangkan dan digeneralisasikan kepada objek ghaib menggunakan prior spatial dan semantik yang kuat. Menggunakan ciri yang diekstrak daripada model bahasa visual CLIP, kajian ini mencadangkan arahan bahasa semula jadi terbuka untuk beroperasi pada objek baharu dan menunjukkan keupayaan kaedah ini untuk membuat generalisasi kepada ungkapan yang tidak kelihatan dan objek baru.
Saya mengetahui bahawa "Heart of the Machine" telah memperkenalkan penyelidikan ini secara terperinci, sila semak "Sejauh manakah robot yang disokong oleh model besar? MIT CSAIL&IAIFI menggunakan bahasa semula jadi untuk membimbing robot untuk menangkap objek"
Pelajar Terbaik Kertas
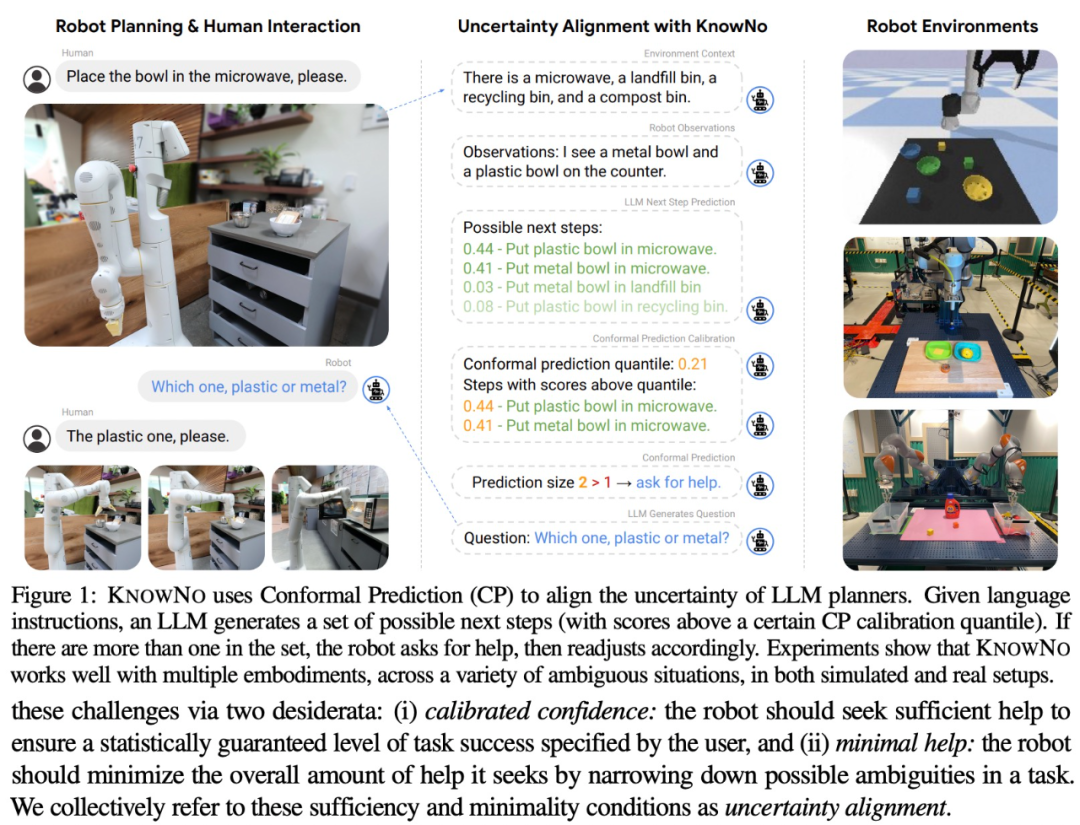
Kertas: Robot Yang Meminta Bantuan: Penjajaran Ketidakpastian untuk Perancang Model Bahasa Besar
- Pengarang: Allen Z. Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu Leila Takayama, Fei Xia, Jake Varley, Zhenjia Xu, Dorsa Sadigh, Andy Zeng, Anirudha Majumdar
- Institusi: Princeton University, Google DeepMind
- Alamat kertas:
- nethttps://openreview? =4ZK8ODNyFXx
- Model bahasa besar (LLM) ialah teknologi dengan prospek aplikasi yang luas, terutamanya dalam bidang robotik. Walau bagaimanapun, walaupun LLM menunjukkan potensi besar dalam perancangan langkah demi langkah dan penaakulan akal, ia juga mengalami beberapa masalah ilusi
KnowNo adalah berdasarkan teori ramalan konformal, yang menyediakan jaminan statistik penyiapan tugas dan mampu meminimumkan campur tangan manusia dalam tugas perancangan pelbagai langkah Penyelidikan telah dijalankan ke atas pelbagai robot simulasi dan sebenar Dalam percubaan, KnowNo telah diuji dengan pelbagai mod tugas ketidakpastian (termasuk ketidakpastian spatial, ketidakpastian berangka, dsb.). Keputusan percubaan menunjukkan bahawa KnowNo berprestasi baik dalam meningkatkan kecekapan dan autonomi, mengatasi prestasi garis dasar serta selamat dan boleh dipercayai. KnowNo boleh digunakan secara langsung dalam LLM tanpa penalaan halus model, menyediakan penyelesaian ringan yang berkesan untuk memodelkan ketidakpastian dan melengkapkan peningkatan keupayaan model asas.
Kajian ini menunjukkan bahawa dengan hanya 20 minit data interaksi dunia sebenar untuk setiap alat, RoboCook boleh mempelajari dan memanipulasi lengan robot untuk menyelesaikan beberapa tugas manipulasi objek plastik-elastik yang kompleks dan jangka panjang, seperti membuat ladu, Kuki abjad, dsb. Menurut keputusan percubaan, prestasi RoboCook jauh lebih baik daripada kaedah SOTA sedia ada, dan ia masih boleh menunjukkan kestabilan dalam menghadapi gangguan luar yang teruk, dan kebolehsesuaiannya kepada bahan yang berbeza juga lebih baik
Kertas Sistem Terbaik
introduction dan penggunaan manusia yang baik:Paper Tetapi bagi robot, memahami cara menggunakan alatan dengan berkesan dan menyelesaikan operasi pada objek yang sepadan masih menjadi cabaran besar. Penyelidikan ini membina sistem robot pintar bernama RoboCook, yang boleh mengesan, memodelkan dan memanipulasi objek plastik elasto melalui pelbagai alatan 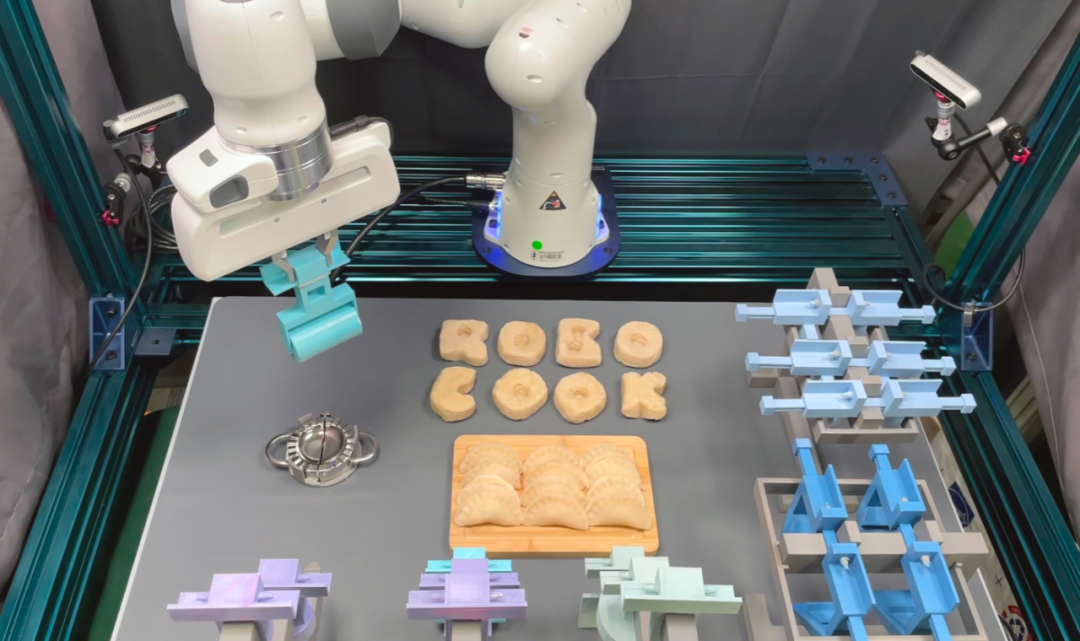
Atas ialah kandungan terperinci Pasukan China memenangi anugerah kertas terbaik dan kertas sistem terbaik, dan keputusan penyelidikan CoRL diumumkan.. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!