
Rumah >Peranti teknologi >AI >Analisis mendalam tentang strategi perubahan lorong Apollo dan aplikasi praktikalnya
Analisis mendalam tentang strategi perubahan lorong Apollo dan aplikasi praktikalnya

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2023-11-07 11:37:05887semak imbas
1. Pengenalan
1.1. Fungsi menukar lorong
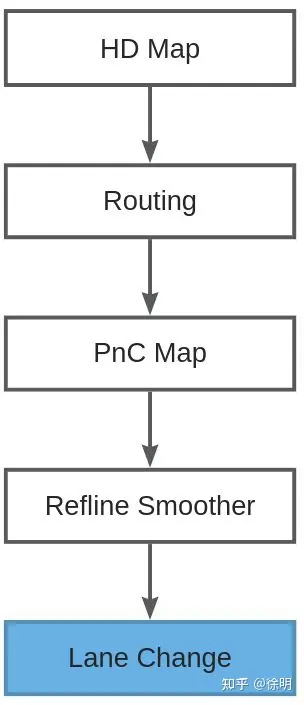
Secara mudahnya, fungsi menukar lorong adalah untuk memilih salah satu garis rujukan daripada garis rujukan untuk dipilih untuk digunakan oleh perancangan modul seterusnya.
Perlu diingat bahawa kod pertukaran lorong sumber terbuka oleh Apollo telah dikurangkan dengan banyak, hanya meninggalkan rangka kerja yang mudah. Banyak fungsi, seperti menukar lorong aktif, menukar lorong pasif (kerana halangan), mesin keadaan yang agak lengkap, tingkap menukar lorong dan pemilihan Jurang, dsb. Artikel teknikal ini hanya menunjukkan kandungan pada rangka kerja sedia ada. Mengenai kandungan fungsi menukar lorong yang lain, sila nantikan artikel seterusnya
1.2 Mesin keadaan menukar lorong
Mesin keadaan menukar lorong semasa Apollo adalah seperti berikut:
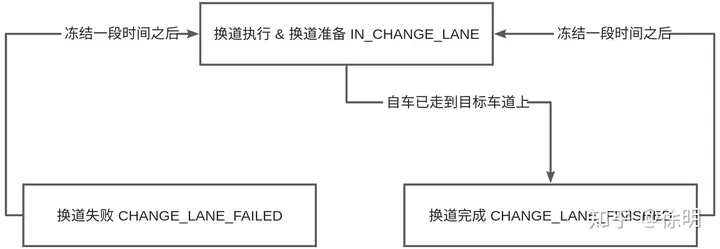
ada beberapa perkara penting mesin keadaan:
- IN_CHANGE_LANE di sini termasuk kedua-dua peringkat perlaksanaan pertukaran lorong dan peringkat penyediaan pertukaran lorong Dalam keadaan biasa, mereka harus dibezakan dengan kaedah menukar baris rujukan dahulu dan kemudian melaksanakan tindakan menukar lorong juga mengamalkan kaedah melaksanakan pertukaran lorong terlebih dahulu Tindakannya adalah dalam kaedah menukar garis rujukan (kelebihannya ialah pada bingkai apabila garis rujukan dihidupkan, jarak sisi kereta sendiri adalah hampir 0).
- Kod semasa tidak menggambarkan bila pertukaran lorong akan gagal. Terdapat juga sebab untuk mempercayai bahawa ia disebabkan oleh pemadaman kod yang berkaitan.
- Status pertukaran lorong yang lengkap hendaklah sekurang-kurangnya termasuk: penyediaan pertukaran lorong, pertukaran lorong. pelaksanaan, penyelenggaraan pertukaran lorong, pembatalan pertukaran lorong, penyiapan pertukaran lorong dan status lain.
2. Analisis kod
2.1. http://lane_change_decider.cc
- Memproses
reference_line_info ialah pengecualian kosong.reference_line_info为空的异常情况.
- 如果配置了强制换道
reckless_change_lane为true, 则直接更新 Reference Line.
- 获取上一帧的换道状态
prev_status, 刚进入程序时, 可能prev_status没有状态信息(!prev_status->has_status()), 此时直接认为处于换道完成状态.
- 如果
reference_line_info的数量为 1(即has_change_lane为false), 说明自车处在巡迹状态, 自车当前所在的车道拥有唯一的车道线, 周围没有可变车道, 所以直接更新换道状态即可.
- 切换换道的状态机
- 上一帧处在换道状态
ChangeLaneStatus::IN_CHANGE_LANE: 如果上一帧自车所在的 Lane 和这一帧所在的 Lane 相同, 说明自车还在往目标车道上走. 反之如果上一帧自车所在的 Lane 和这一帧所在的 Lane 不同, 说明自车已经在目标车道上了, 切换已经完成.
- 上一帧处在换道失败状态
ChangeLaneStatus::CHANGE_LANE_FAILED: 如果换道失败, 则冻结状态一段时间, 然后切换到正在换道状态, 为下一次换道做准备.
- 上一帧处在换道完成状态
ChangeLaneStatus::CHANGE_LANE_FINISHED: 换道成功后同样冻结一段时间, 然后切换到正在换道状态, 为下一次换道做准备. 这里冻结时间是为了避免频繁换道.
2.2. 安全检查
reference_line_info ialah pengecualian kosong.reference_line_info为空的异常情况.reckless_change_lane为true, 则直接更新 Reference Line.prev_status, 刚进入程序时, 可能prev_status没有状态信息(!prev_status->has_status()), 此时直接认为处于换道完成状态.reference_line_info的数量为 1(即has_change_lane为false), 说明自车处在巡迹状态, 自车当前所在的车道拥有唯一的车道线, 周围没有可变车道, 所以直接更新换道状态即可.ChangeLaneStatus::IN_CHANGE_LANE: 如果上一帧自车所在的 Lane 和这一帧所在的 Lane 相同, 说明自车还在往目标车道上走. 反之如果上一帧自车所在的 Lane 和这一帧所在的 Lane 不同, 说明自车已经在目标车道上了, 切换已经完成.ChangeLaneStatus::CHANGE_LANE_FAILED: 如果换道失败, 则冻结状态一段时间, 然后切换到正在换道状态, 为下一次换道做准备.ChangeLaneStatus::CHANGE_LANE_FINISHED: 换道成功后同样冻结一段时间, 然后切换到正在换道状态, 为下一次换道做准备. 这里冻结时间是为了避免频繁换道.IsClearToChangeLane
has_change_lane ialah false code>), menunjukkan bahawa kenderaan berada dalam keadaan rondaan. Lorong di mana kenderaan itu berada pada masa ini mempunyai garis lorong yang unik dan tiada lorong berubah-ubah di sekelilingnya, jadi anda boleh terus kemas kini status pertukaran lorong. : rgb(231, 243, 237); padding: 1px 3px; >: Jika Lorong di mana kereta berada dalam rangka sebelumnya berbeza dengan bingkai ini Jika Lorong di mana kenderaan itu berada adalah sama, bermakna kenderaan itu masih berjalan menuju ke lorong sasaran Sebaliknya, jika Lorong di mana kenderaan itu berada di dalam rangka sebelum ini berbeza dengan Lorong di mana ia terletak di dalam bingkai ini, bermakna kenderaan itu sudah berada di lorong sasaran dan suis telah siap.# 🎜🎜#Sebelumnya bingkai berada dalam keadaan kegagalan menukar lorong<code style="background-color: rgb(231, 243, 237); padding: 1px 3px; border-radius: 4px; overflow-wrap: break -word; text-indent: 0px; display: inline-block;">ChangeLaneStatus::CHANGE_LANE_FAILED: Jika pertukaran lorong gagal, keadaan akan dibekukan untuk satu tempoh masa, dan kemudian ditukar kepada keadaan menukar lorong untuk pertukaran lorong seterusnya. .Bingkai sebelumnya berada dalam keadaan lorong yang berubahChangeLaneStatus::CHANGE_LANE_FINISHED: Selepas penukaran lorong berjaya, ia juga akan membeku untuk tempoh masa, dan kemudian beralih ke keadaan menukar lorong untuk kali seterusnya Bersedia untuk menukar lorong Bekukan masa di sini untuk mengelakkan pertukaran lorong yang kerap
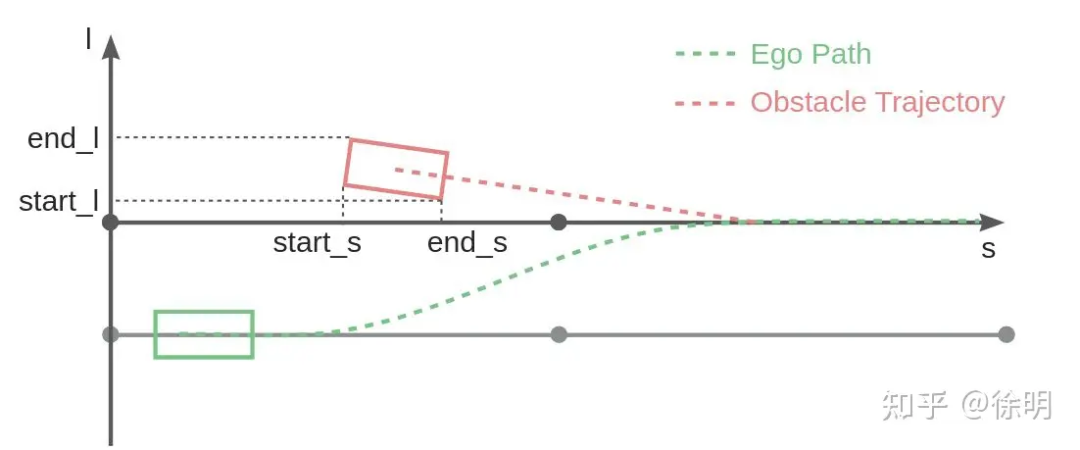
2.2 >IsClearToChangeLane Tentukan sama ada selamat untuk menukar lorong.
Kaedah pertimbangan keselamatan ini tidak mengambil kira halangan maya (Halangan Maya) dan halangan statik (Halangan Statik).# 🎜🎜##🎜🎜#Dinamik pengiraan Unjuran halangan pada Garis Rujukan Maksud geometri unjuran adalah seperti yang ditunjukkan di bawah: #🎜🎜##🎜🎜##🎜🎜##🎜🎜##🎜🎜.
- Jika kereta anda menukar lorong
IsChangeLanePath, gunakan perhubungan unjuran yang dikira di atas untuk mengabaikan di luar lorong garis rujukan sasaran halangan.IsChangeLanePath, 利用上面计算的投影关系来忽略目标参考线的车道之外的障碍物.
- 判断障碍物的行驶方向是否和自车相同
same_direction. 根据障碍物与自车的行驶方向的关系和速度关系分别计算前向安全距离和后向安全距离.
- 如果自车和障碍物之间的距离大于上面计算的安全距离, 则认为可以安全换道的.
HysteresisFilter是一种 Open Close 逻辑, 目的是增加安全判断结果的稳定性(上一帧判断结果认为是安全的, 那么这一帧就更倾向于给出是安全的判断, 反之亦然).
2.3. 更新 Reference Line
需要重写的内容是:LaneChangeDecider::PrioritizeChangeLane
- 输入:
<span> </span>is_prioritize_change_lane. 如果is_prioritize_change_lane为true, 则找自车要切换的目标参考线. 反之如果is_prioritize_change_lane为false, 则找自车当前位置所在的 Lane 所在的参考线.
-
reference_line_info->splice(reference_line_info->begin(),*reference_line_info, iter);将步骤 1 找到的iter所指向的参考线放在链表的最前面. 由于 Planning 后续模块使用的都是reference_line_info().front(), 所以链表的最前面就表示当帧就是使用的参考线. splice的使用详细说明见C++ 基础.
- 输出:
ReferenceLineInfo
Tentukan sama ada halangan bergerak dalam arah yang sama dengan kenderaan<span>Jarak keselamatan ke hadapan dan jarak keselamatan ke belakang</span>
.
Jika jarak antara kenderaan dan halangan lebih besar daripada jarak keselamatan yang dikira di atas, ia dianggap selamat untuk perubahan. Taoisme. HysteresisFilter ialah sejenis logik Open Close, tujuannya adalah untuk meningkatkan kestabilan keputusan penghakiman keselamatan (hasil penghakiman bingkai sebelumnya dianggap selamat, maka bingkai ini akan lebih cenderung untuk memberikan pertimbangan yang selamat, dan sebaliknya).
2.3. Kemas Kini Talian Rujukan
false, kemudian cari garis rujukan Lorong di mana kedudukan semasa kereta berada.🎜🎜, jadi bahagian hadapan senarai terpaut Ini bermakna bingkai ialah garis rujukan yang digunakan.<span> </span><code style=" background-color: rgb padding: jejari sempadan: patah-kata paparan: inline-block>splice Untuk arahan terperinci, lihat Asas C++.🎜🎜Output: ReferenceLineInfo senarai terpaut. 🎜🎜🎜🎜🎜🎜Pautan asal: https://mp.weixin.qq.com/s/IQkBV8iadaU4Qy70F3Xs3Q🎜

Atas ialah kandungan terperinci Analisis mendalam tentang strategi perubahan lorong Apollo dan aplikasi praktikalnya. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- 广域网中采用的交换技术大多是什么
- 物联网的技术架构由哪些层组成
- Tesla Autopilot Hardware 4.0 Physical Teardown: Menambah Radar dan Menyediakan Lebih Banyak Kamera
- Perbincangan mendalam tentang status semasa dan trend masa depan rantai alat pembangunan pemanduan autonomi
- Ia boleh 'memandu secara autonomi' tanpa bateri, dan robot ini boleh mempunyai hayat bateri tanpa had.