
Rumah >Peranti teknologi >AI >Set Data Persepsi Amodal Sintetik AmodalSynthDrive: Penyelesaian Inovatif untuk Pemanduan Autonomi
Set Data Persepsi Amodal Sintetik AmodalSynthDrive: Penyelesaian Inovatif untuk Pemanduan Autonomi

- 王林ke hadapan
- 2023-10-11 12:09:031409semak imbas
- paper Link: https://arxiv.org/pdf/2309.06547.pdf
- dataset Link: http: //amodalsyndrive.cs.uni-freiburg.de
abstract
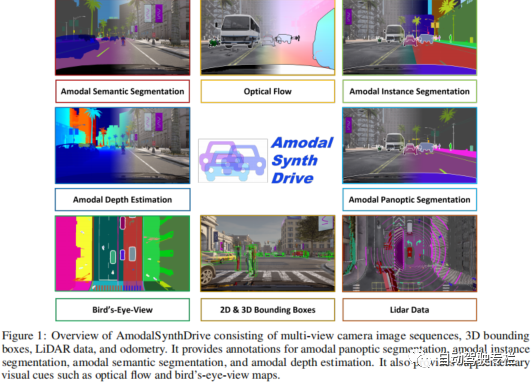
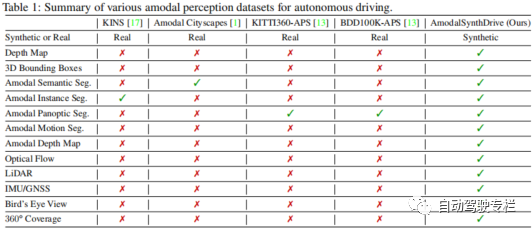
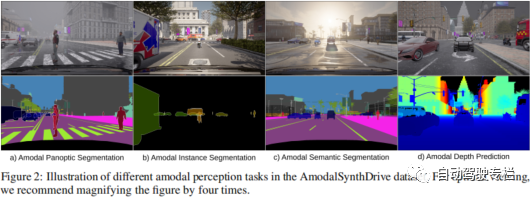
Makalah ini memperkenalkan AmodalSynthDrive: set data persepsi amodal sintetik untuk pemanduan autonomi. Tidak seperti manusia, yang boleh menganggarkan keseluruhan objek dengan mudah walaupun dengan kehadiran oklusi separa, algoritma penglihatan komputer moden masih mendapati aspek ini amat mencabar. Memanfaatkan persepsi amodal ini untuk pemanduan autonomi masih belum diterokai kerana kekurangan set data yang sesuai. Penjanaan set data ini terutamanya dipengaruhi oleh kos anotasi yang mahal dan keperluan untuk mengurangkan gangguan yang disebabkan oleh subjektiviti anotasi dalam pelabelan kawasan tersumbat dengan tepat. Untuk menangani batasan ini, makalah ini memperkenalkan AmodalSynthDrive, set data persepsi amodal berbilang tugas sintetik. Set data menyediakan imej kamera berbilang paparan, kotak sempadan 3D, data lidar dan odometri untuk 150 urutan pemanduan, termasuk lebih daripada anotasi objek 1M dalam pelbagai keadaan trafik, cuaca dan pencahayaan. AmodalSynthDrive menyokong pelbagai tugas pemahaman adegan amodal, termasuk pengenalan anggaran kedalaman amodal untuk pemahaman spatial yang dipertingkatkan. Artikel ini menilai beberapa garis dasar untuk setiap tugas untuk menggambarkan cabaran dan menyediakan pelayan penanda aras awam. Sumbangan Utama Kertas kerja ini mencadangkan penanda aras untuk tugas persepsi bukan modal, termasuk segmentasi semantik bukan modal, segmentasi contoh bukan modal dan segmentasi panorama bukan modal
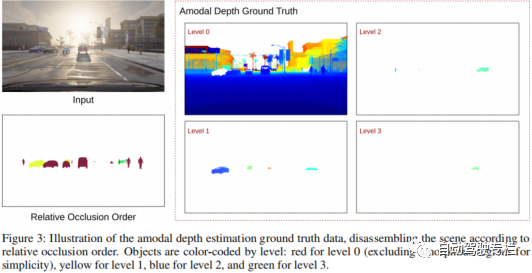
3) Tujuan tugas anggaran kedalaman bukan modal baharu Dalam mempromosikan dipertingkatkan. pemahaman spatial. Kertas kerja ini menunjukkan kebolehlaksanaan tugas baharu ini melalui beberapa garis dasar.Gambar dan meja kertas
Ringkasan
Persepsi ialah tugas utama untuk kenderaan autonomi, tetapi kaedah semasa masih kurang pemahaman amodal yang diperlukan untuk mentafsir adegan lalu lintas yang kompleks. Oleh itu, kertas kerja ini mencadangkan AmodalSynthDrive, set data persepsi sintetik multimodal untuk pemanduan autonomi. Dengan imej sintetik dan awan titik lidar, kami menyediakan set data komprehensif yang merangkumi data beranotasi ground-truth untuk tugas persepsi amodal asas dan memperkenalkan tugas baharu untuk meningkatkan pemahaman spatial yang dipanggil anggaran kedalaman Amodal. Kertas kerja ini menyediakan lebih 60,000 set imej individu, setiap satunya mengandungi pembahagian contoh amodal, pembahagian semantik amodal, pembahagian panorama amodal, aliran optik, kotak sempadan 2D dan 3D, kedalaman amodal dan data berkaitan Rajah mata. Melalui AmodalSynthDrive, kertas kerja ini menyediakan pelbagai garis dasar dan percaya bahawa kerja ini akan membuka jalan kepada jenis penyelidikan baharu mengenai pemahaman adegan amodal dalam persekitaran bandar dinamik

Pautan asal: https://mp.weixin .qq.com /s/7cXqFbMoljcs6dQOLU3SAQ
Atas ialah kandungan terperinci Set Data Persepsi Amodal Sintetik AmodalSynthDrive: Penyelesaian Inovatif untuk Pemanduan Autonomi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!