

 Peranti teknologiAIMemperbaik kaedah perancangan trajektori untuk pemanduan autonomi dalam persekitaran yang tidak menentu
Peranti teknologiAIMemperbaik kaedah perancangan trajektori untuk pemanduan autonomi dalam persekitaran yang tidak menentuMemperbaik kaedah perancangan trajektori untuk pemanduan autonomi dalam persekitaran yang tidak menentu

Tajuk tesis: "Kaedah perancangan trajektori untuk kenderaan autonomi dalam persekitaran yang tidak menentu berdasarkan kawalan ramalan model yang dipertingkatkan"
Jurnal yang diterbitkan: Transaksi IEEE mengenai Sistem Pengangkutan Pintar
Tarikh penerbitan: April 2023
Bacaan saya sendiri terutamanya bahagian yang saya fikir adalah perkara utama, bukan terjemahan teks penuh Artikel ini mengikuti artikel sebelumnya dan menyusun bahagian pengesahan percubaan kertas ini. Artikel sebelum ini adalah seperti berikut: Berikut adalah nota pembacaan kertas saya sendiri, terutamanya bahagian yang saya fikir adalah perkara utama, bukan terjemahan teks penuh Artikel ini mengikuti artikel sebelumnya dan menyusun bahagian pengesahan eksperimen kertas ini. Artikel sebelum ini adalah seperti berikut:
fhwim: Kaedah perancangan trajektori berdasarkan kawalan ramalan model yang dipertingkatkan untuk kenderaan autonomi dalam persekitaran yang tidak menentu
https://zhuanlan.zhihu.com/p/658708080
1 (1) Persekitaran simulasi
Alat simulasi bersama termasuk Prescan, PyCharm, Matlab/Simulink, antaranya Prescan digunakan untuk membina adegan trafik simulasi, dan PyCharm (dengan rangkaian neural atau pytorch dengan mudah) digunakan untuk menulis modul ramalan gabungan , Matlab/Simulink (dengan kotak alat MPC) digunakan untuk membina modul perancangan trajektori dan merealisasikan kawalan kenderaan Keseluruhan idea pemilihan alat adalah agak semula jadi dan munasabah. Kawalan mendatar yang digunakan untuk mengawal bahagian ini ialah LQR, dan kawalan menegak menggunakan PID, yang juga merupakan kaedah kawalan yang agak biasa. Penyahkod pengekod LSTM dalam modul ramalan gabungan menggunakan kod sumber terbuka. Penulis berkata ia datang daripada rujukan [31] Kajian Komprehensif Selang Ramalan Berasaskan Rangkaian Neural dan Pendahuluan Baharu, tetapi saya melihat bahawa artikel ini diterbitkan pada tahun 2011. Ia agak lama (di manakah kod pengekod LSTM pada tahun 2011? Saya tidak tahu sama ada pengarang telah menukar kod berdasarkan ini.
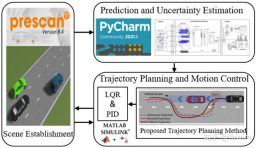 Rajah 1 Persediaan persekitaran simulasi
Rajah 1 Persediaan persekitaran simulasi
(2) Mendapatkan set MRPI
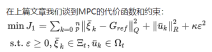


set subsistem MRPI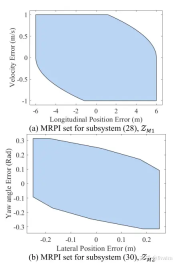
(3) kes1: pengelakan statik Adegan halangan
Adegan mengelak halangan statik merujuk kepada pegun kenderaan halangan Hasil perancangan trajektori adalah seperti berikut:

Bandingkan kaedah MPC umum dan kaedah MPC berasaskan saluran paip dalam Rajah 3
Di sini saya mengesyaki bahawa dia mempunyai legen. Soalan, mengikut artikel sebelum ini, trajektori rujukan akhir diperolehi dengan menambah trajektori yang dikehendaki dan trajektori pelarasan Pada masa yang sama, ketika menganalisis keputusan, beliau juga mengatakan bahawa MPC berasaskan tiub berada di kawasan dan. dalam Rajah 3(b). ) harus ditukar, iaitu garisan hijau ialah trajektori rujukan akhir. Termasuk lengkung kelajuan dan lengkung ralat mendatar dan menegak di bawah, tetapi anda mungkin boleh memahami maksud pengarang Lengkung hijau dalam MPC berasaskan tiub ialah hasil akhir, dan lengkung biru ialah hasil tanpa trajektori pelarasan.
Rajah 4 menunjukkan perbandingan perubahan kelajuan antara kaedah MPC am dan kaedah MPC berasaskan saluran paip
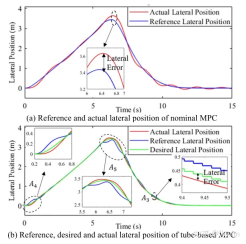
Rajah 5 Perbandingan kedudukan melintang
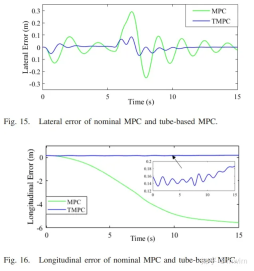
ralat mendatar dan menegak Rajah 6
Penulis juga membandingkan kelancaran perubahan sudut stereng, yang tidak akan saya jelaskan secara terperinci di sini, ia telah bertambah baik. Pada masa yang sama, penulis mencadangkan asas teori untuk kesan baik melaraskan trajektori Selepas menambahnya, ralat trajektori sentiasa berada dalam set MRPI, iaitu sisihan penjejakan bagi kawalan ramalan model berasaskan tiub (MPC berasaskan tiub) sentiasa berada dalam set MRPI Kawalan ramalan model umum (MPC) tidak mempunyai sempadan dalam persekitaran yang tidak menentu, yang mungkin sangat besar
(4) kes2: adegan pengelakan halangan dinamik
Berbanding dengan. adegan tadi, kini kereta penghalang mula bergerak. Kami tidak akan membincangkan secara terperinci tentang trajektori keseluruhan, perubahan kelajuan, ralat mendatar dan menegak, dan kelancaran perubahan stereng. Di sini, hanya ilustrasi trajektori keseluruhan ditunjukkan
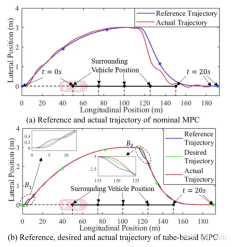
Rajah 7 Perbandingan keseluruhan trajektori antara kaedah MPC am dan kaedah MPC berasaskan tiub
(5) kes3: adegan pemanduan sebenar
Di sini, pengarang memilih untuk menggunakan set data NGSIM untuk mengesahkan kaedah anda. Pertama, penulis mengesahkan kaedah ramalan gabungan. Set data NGSIM mengandungi data trajektori kenderaan, yang pengarang dibahagikan kepada trajektori sejarah dan trajektori masa depan, dan membina set latihan untuk penyahkod pengekod LSTM untuk dipelajari. Penulis memilih 10,000 trajektori yang mana 7,500 daripadanya digunakan sebagai set latihan dan 2,500 sebagai set pengesahan. Pengoptimum mengambil Adam dan menetapkan kadar pembelajaran kepada 0.01. Kesan ramalan ditunjukkan dalam rajah di bawah
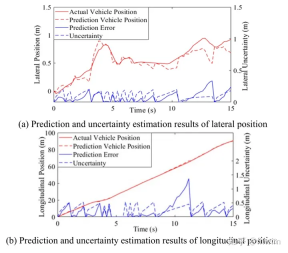
Rajah 8 Keputusan ramalan trajektori mendatar dan menegak dan ketidakpastian
Dalam artikel ini, penulis tidak menggunakan penunjuk yang biasa digunakan dalam bidang ramalan trajektori, seperti ADE, FDE, dsb. Saya rasa pendekatan ini tidak meyakinkan, tetapi ia juga boleh difahami bahawa fokus artikel ini adalah perancangan trajektori berdasarkan MPC berasaskan tiub
Selepas mengesahkan ramalan trajektori, perancangan trajektori telah dilakukan untuk mengesahkan lagi peranan modul ramalan trajektori . Berikut adalah perbandingan Terdapat tiga situasi:
(a) Apabila saya sudah tahu trajektori masa depan sebenar kereta halangan, saya akan menjalankan perancangan trajektori Ini berfungsi sebagai kumpulan kawalan
Apabila saya tidak tahu masa depan trajektori kereta halangan, saya akan lakukannya dahulu Ramalan Trajektori (tetapi bukan mengira ketidakpastian), dan kemudian perancangan trajektori
(c) Apabila saya tidak tahu trajektori masa depan kereta halangan, saya mula-mula melakukan ramalan trajektori (mengira ketidakpastian), dan kemudian perancangan trajektori
Rajah 9 menunjukkan keputusan (a), (b) dan (c), masing-masing sepadan dengan Kedudukan Benar, Keputusan Ramalan dan Kaedah Cadangan
Cadangan Kaedah ialah hasil yang diperolehi oleh kaedah dalam artikel ini. Anda boleh melihat bahawa Kaedah Cadangan adalah lebih dekat Kedudukan Benar menunjukkan bahawa kaedah ramalan gabungan ini (terutamanya pengiraan ketidakpastian) adalah berkesan.
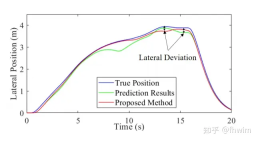
Rajah 9 Perbandingan tiga kaedah untuk mengesahkan modul ramalan trajektori
Di sini anda boleh menemui kes1 dan kes2 mengesahkan bahagian perancangan trajektori di hadapan kawalan ramalan model am (MPC) dan saluran paip -berasaskan MPC adalah sama, perbandingan ini boleh menggambarkan peranan MPC berasaskan saluran paip. Case3 adalah untuk mengesahkan modul ramalan trajektori Anda boleh melihat bahawa dua jenis pengesahan telah dilakukan. Jenis pertama adalah untuk membandingkan secara langsung trajektori yang diramalkan dan trajektori sebenar, dan jenis kedua adalah untuk terlebih dahulu mengetahui trajektori masa depan / meramalkan trajektori masa depan (tanpa mengira ketidakpastian) / meramalkan trajektori masa depan (mengira ketidakpastian), dan kemudian melakukan trajektori perancangan. Dengan menggunakan kedudukan sebenar sebagai piawai, kesan kaedah ramalan trajektori dengan pengiraan ketidakpastian dan kaedah ramalan trajektori tanpa pengiraan ketidakpastian dibandingkan. Idea pengesahan untuk kedua-dua modul ini masih sangat jelas
2. Pengesahan eksperimen kenderaan sebenar
Kenderaan yang digunakan dalam eksperimen ditunjukkan dalam gambar di bawah:
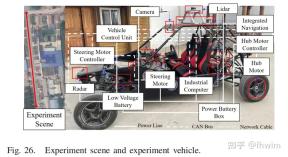
Kandungan yang perlu ditulis semula ialah: kenderaan yang digunakan dalam eksperimen Gambar 10
Pengarang juga menyediakan parameter kenderaan eksperimen dan parameter komputer serta sensor yang digunakan dalam eksperimen:
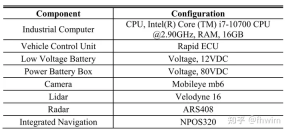
Kandungan yang perlu ditulis semula ialah: Rajah 11 The parameter komputer dan penderia
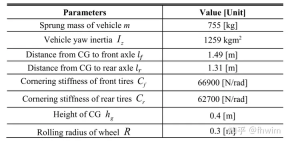
perlu ditulis semula Kandungannya ialah: Parameter kenderaan eksperimen, Rajah 12
Demi keselamatan, adegan eksperimen yang ditetapkan oleh pengarang adalah sama dengan kes eksperimen simulasi 1. Ia adalah adegan mengelakkan halangan statik Adalah lebih baik untuk membandingkan trajektori keseluruhan, perubahan kelajuan, ralat mendatar dan menegak. dan kelancaran perubahan stereng, yang tidak akan diterangkan secara terperinci.
3. Ringkasan bacaan
Pertama sekali, idea kertas itu adalah mengenai modul ramalan trajektori dengan pengiraan ketidakpastian dan modul perancangan trajektori berdasarkan MPC berasaskan tiub. Antaranya, modul perancangan trajektori merupakan kandungan utama. Saya sangat berpuas hati dengan bentuk modular ini kerana ia benar-benar menggunakan ramalan trajektori kepada perancangan trajektori. Output ramalan digunakan sebagai input perancangan, dan modul perancangan hanya menentukan ambang keselamatan untuk modul ramalan, dan gandingan antara kedua-dua modul adalah lemah. Dalam erti kata lain, modul ramalan boleh digantikan dengan kaedah lain selagi ia dapat memberikan hasil ramalan trajektori dan ketidakpastian kereta halangan. Pada masa hadapan, rangkaian saraf yang lebih maju boleh dipertimbangkan untuk meramalkan secara langsung trajektori dan ketidakpastian. Secara keseluruhan, proses algoritma ramalan gabungan ini agak rumit, tetapi saya fikir idea kertas itu sangat bagus. Idea dan beban kerja simulasi dan ujian kenderaan sebenar juga memuaskan
Kedua, terdapat beberapa ralat peringkat rendah ditemui semasa membaca artikel. Sebagai contoh, dalam bahagian penyahkod pengekod LSTM, output LSTM ialah titik trajektori masa hadapan langkah, yang juga ditulis dalam formula, tetapi dalam teks ia ditulis sebagai . . (32) dan (34), tetapi Sebenarnya subsistem (30) dan (32), kesilapan kecil ini tidak menjejaskan kaedah keseluruhan tetapi juga akan menjejaskan pengalaman membaca pembaca.

Rajah 14 Bahagian eksperimen simulasi MRPI Tetapkan teks asal
 Sistem ralat dalam Rajah 15 dibahagikan kepada subsistem (30) dan (32)
Sistem ralat dalam Rajah 15 dibahagikan kepada subsistem (30) dan (32)
pautan teks asal . weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA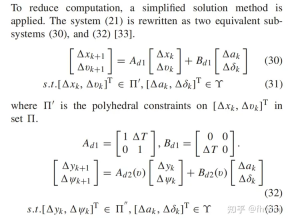
Atas ialah kandungan terperinci Memperbaik kaedah perancangan trajektori untuk pemanduan autonomi dalam persekitaran yang tidak menentu. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

 Jurang kemahiran AI memperlahankan rantaian bekalanApr 26, 2025 am 11:13 AM
Jurang kemahiran AI memperlahankan rantaian bekalanApr 26, 2025 am 11:13 AMIstilah "tenaga kerja siap sedia" sering digunakan, tetapi apakah maksudnya dalam industri rantaian bekalan? Menurut Abe Eshkenazi, Ketua Pegawai Eksekutif Persatuan Pengurusan Rantaian Bekalan (ASCM), ia menandakan profesional yang mampu mengkritik
 Bagaimana satu syarikat secara senyap -senyap bekerja untuk mengubah AI selama -lamanyaApr 26, 2025 am 11:12 AM
Bagaimana satu syarikat secara senyap -senyap bekerja untuk mengubah AI selama -lamanyaApr 26, 2025 am 11:12 AMRevolusi AI yang terdesentralisasi secara senyap -senyap mendapat momentum. Jumaat ini di Austin, Texas, Sidang Kemuncak Endgame Bittensor menandakan momen penting, beralih ke desentralisasi AI (DEAI) dari teori kepada aplikasi praktikal. Tidak seperti iklan mewah
 NVIDIA Melepaskan Microservices Nemo Untuk Menyebarkan Pembangunan Agen AIApr 26, 2025 am 11:11 AM
NVIDIA Melepaskan Microservices Nemo Untuk Menyebarkan Pembangunan Agen AIApr 26, 2025 am 11:11 AMPerusahaan AI menghadapi cabaran integrasi data Penggunaan perusahaan AI menghadapi cabaran utama: sistem bangunan yang dapat mengekalkan ketepatan dan kepraktisan dengan terus belajar data perniagaan. Microservices NEMO menyelesaikan masalah ini dengan mewujudkan apa yang NVIDIA menggambarkan sebagai "Flywheel Data", yang membolehkan sistem AI tetap relevan melalui pendedahan berterusan kepada maklumat perusahaan dan interaksi pengguna. Toolkit yang baru dilancarkan ini mengandungi lima microservices utama: Nemo Customizer mengendalikan penalaan model bahasa yang besar dengan latihan yang lebih tinggi. NEMO Evaluator menyediakan penilaian ringkas model AI untuk tanda aras tersuai. Nemo Guardrails Melaksanakan Kawalan Keselamatan untuk mengekalkan pematuhan dan kesesuaian
 AI melukis gambar baru untuk masa depan seni dan reka bentukApr 26, 2025 am 11:10 AM
AI melukis gambar baru untuk masa depan seni dan reka bentukApr 26, 2025 am 11:10 AMAI: Masa Depan Seni dan Reka Bentuk Kecerdasan Buatan (AI) mengubah bidang seni dan reka bentuk dengan cara yang belum pernah terjadi sebelumnya, dan impaknya tidak lagi terhad kepada amatur, tetapi lebih mempengaruhi profesional. Skim karya seni dan reka bentuk yang dihasilkan oleh AI dengan cepat menggantikan imej dan pereka bahan tradisional dalam banyak aktiviti reka bentuk transaksional seperti pengiklanan, generasi imej media sosial dan reka bentuk web. Walau bagaimanapun, artis dan pereka profesional juga mendapati nilai praktikal AI. Mereka menggunakan AI sebagai alat tambahan untuk meneroka kemungkinan estetik baru, menggabungkan gaya yang berbeza, dan membuat kesan visual baru. AI membantu artis dan pereka mengautomasikan tugas berulang, mencadangkan elemen reka bentuk yang berbeza dan memberikan input kreatif. AI menyokong pemindahan gaya, iaitu menggunakan gaya gambar
 Bagaimana Zoom merevolusikan kerja dengan Agentic AI: Dari mesyuarat ke tonggakApr 26, 2025 am 11:09 AM
Bagaimana Zoom merevolusikan kerja dengan Agentic AI: Dari mesyuarat ke tonggakApr 26, 2025 am 11:09 AMZoom, yang pada mulanya dikenali untuk platform persidangan video, memimpin revolusi tempat kerja dengan penggunaan inovatif AIS AI. Perbualan baru -baru ini dengan CTO Zoom, XD Huang, mendedahkan penglihatan yang bercita -cita tinggi syarikat itu. Menentukan Agentic AI Huang d
 Ancaman eksistensi ke universitiApr 26, 2025 am 11:08 AM
Ancaman eksistensi ke universitiApr 26, 2025 am 11:08 AMAdakah AI akan merevolusikan pendidikan? Soalan ini mendorong refleksi serius di kalangan pendidik dan pihak berkepentingan. Penyepaduan AI ke dalam pendidikan memberikan peluang dan cabaran. Sebagai Matthew Lynch dari Nota Edvocate Tech, Universit
 Prototaip: saintis Amerika mencari pekerjaan di luar negaraApr 26, 2025 am 11:07 AM
Prototaip: saintis Amerika mencari pekerjaan di luar negaraApr 26, 2025 am 11:07 AMPembangunan penyelidikan dan teknologi saintifik di Amerika Syarikat mungkin menghadapi cabaran, mungkin disebabkan oleh pemotongan anggaran. Menurut Alam, bilangan saintis Amerika yang memohon pekerjaan di luar negara meningkat sebanyak 32% dari Januari hingga Mac 2025 berbanding dengan tempoh yang sama pada tahun 2024. Pungutan sebelumnya menunjukkan bahawa 75% penyelidik yang ditinjau sedang mempertimbangkan untuk mencari pekerjaan di Eropah dan Kanada. Beratus-ratus geran NIH dan NSF telah ditamatkan dalam beberapa bulan yang lalu, dengan geran baru NIH turun kira-kira $ 2.3 bilion tahun ini, setitik hampir satu pertiga. Cadangan belanjawan yang bocor menunjukkan bahawa pentadbiran Trump sedang mempertimbangkan untuk memotong belanjawan secara mendadak untuk institusi saintifik, dengan kemungkinan pengurangan sehingga 50%. Kegawatan dalam bidang penyelidikan asas juga telah menjejaskan salah satu kelebihan utama Amerika Syarikat: menarik bakat luar negara. 35
 Semua Mengenai Keluarga GPT 4.1 Terbuka AI - Analytics VidhyaApr 26, 2025 am 10:19 AM
Semua Mengenai Keluarga GPT 4.1 Terbuka AI - Analytics VidhyaApr 26, 2025 am 10:19 AMOpenAI melancarkan siri GPT-4.1 yang kuat: keluarga tiga model bahasa lanjutan yang direka untuk aplikasi dunia nyata. Lompat penting ini menawarkan masa tindak balas yang lebih cepat, pemahaman yang lebih baik, dan kos yang dikurangkan secara drastik berbanding t


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Versi Mac WebStorm
Alat pembangunan JavaScript yang berguna

mPDF
mPDF ialah perpustakaan PHP yang boleh menjana fail PDF daripada HTML yang dikodkan UTF-8. Pengarang asal, Ian Back, menulis mPDF untuk mengeluarkan fail PDF "dengan cepat" dari tapak webnya dan mengendalikan bahasa yang berbeza. Ia lebih perlahan dan menghasilkan fail yang lebih besar apabila menggunakan fon Unicode daripada skrip asal seperti HTML2FPDF, tetapi menyokong gaya CSS dsb. dan mempunyai banyak peningkatan. Menyokong hampir semua bahasa, termasuk RTL (Arab dan Ibrani) dan CJK (Cina, Jepun dan Korea). Menyokong elemen peringkat blok bersarang (seperti P, DIV),

EditPlus versi Cina retak
Saiz kecil, penyerlahan sintaks, tidak menyokong fungsi gesaan kod

DVWA
Damn Vulnerable Web App (DVWA) ialah aplikasi web PHP/MySQL yang sangat terdedah. Matlamat utamanya adalah untuk menjadi bantuan bagi profesional keselamatan untuk menguji kemahiran dan alatan mereka dalam persekitaran undang-undang, untuk membantu pembangun web lebih memahami proses mengamankan aplikasi web, dan untuk membantu guru/pelajar mengajar/belajar dalam persekitaran bilik darjah Aplikasi web keselamatan. Matlamat DVWA adalah untuk mempraktikkan beberapa kelemahan web yang paling biasa melalui antara muka yang mudah dan mudah, dengan pelbagai tahap kesukaran. Sila ambil perhatian bahawa perisian ini

SublimeText3 versi Inggeris
Disyorkan: Versi Win, menyokong gesaan kod!

