
Rumah >Peranti teknologi >AI >Yang mengganggu, anjing robot sudah mempunyai keupayaan ini
Yang mengganggu, anjing robot sudah mempunyai keupayaan ini

- 王林ke hadapan
- 2023-10-03 15:33:091155semak imbas
Menggunakan rangkaian neural tunggal untuk mencapai manipulasi adalah satu kejayaan teknologi utama dalam bidang robot berkaki empat
Parkour ialah sukan lasak yang memerlukan peserta untuk melepasi halangan dengan cara yang sangat dinamik " Untuk robot "kekok", ini nampaknya sesuatu yang tidak dapat dicapai, tetapi baru-baru ini terdapat beberapa trend dalam penemuan teknologi dalam bidang kawalan robot. Beberapa minggu yang lalu, laman web ini melaporkan kajian yang menggunakan kaedah pembelajaran pengukuhan untuk membolehkan anjing robot mencapai parkour, dan mencapai keputusan yang baik. Baru-baru ini, Universiti Carnegie Mellon (CMU) telah menjalankan kajian baharu, mencadangkan kaedah baharu yang menakjubkan untuk cabaran parkour anjing robot, dan kesannya telah dipertingkatkan lagi, sehinggakan orang ramai sebulat suara mengulas sebagai "luar biasa" "Memang menakjubkan"
Penonton berkata: "Ia seperti berada dalam "Black Mirror""
Penyelidikan di Carnegie Mellon University membolehkan anjing robot bertindak seperti pesaing dalam laluan berhalangan, dan secara automatik melepasi halangan dan melompat antara cerun condong pada sudut yang berbeza




- Sila klik pautan berikut untuk melihat kertas kerja: https://extreme-parkour.github.io/resources/parkour.pdf
- Projek alamat: https://extreme-parkour.github.io/resources/parkour.pdf /github.com/chengxuxin/extreme-parkour
Pengenalan kaedah
Penyelidikan ini menggunakan data hujung ke hujung- rangka kerja pembelajaran pengukuhan yang didorong untuk melengkapkan anjing robot dengan keupayaan untuk "parkour". Untuk membolehkan anjing robot menyesuaikan diri mengikut jenis halangan apabila digunakan, penyelidikan ini mencadangkan kaedah penyulingan dwi novel. Strategi ini bukan sahaja boleh mengeluarkan arahan gerakan fleksibel, tetapi juga dengan cepat melaraskan arah mengikut imej kedalaman input.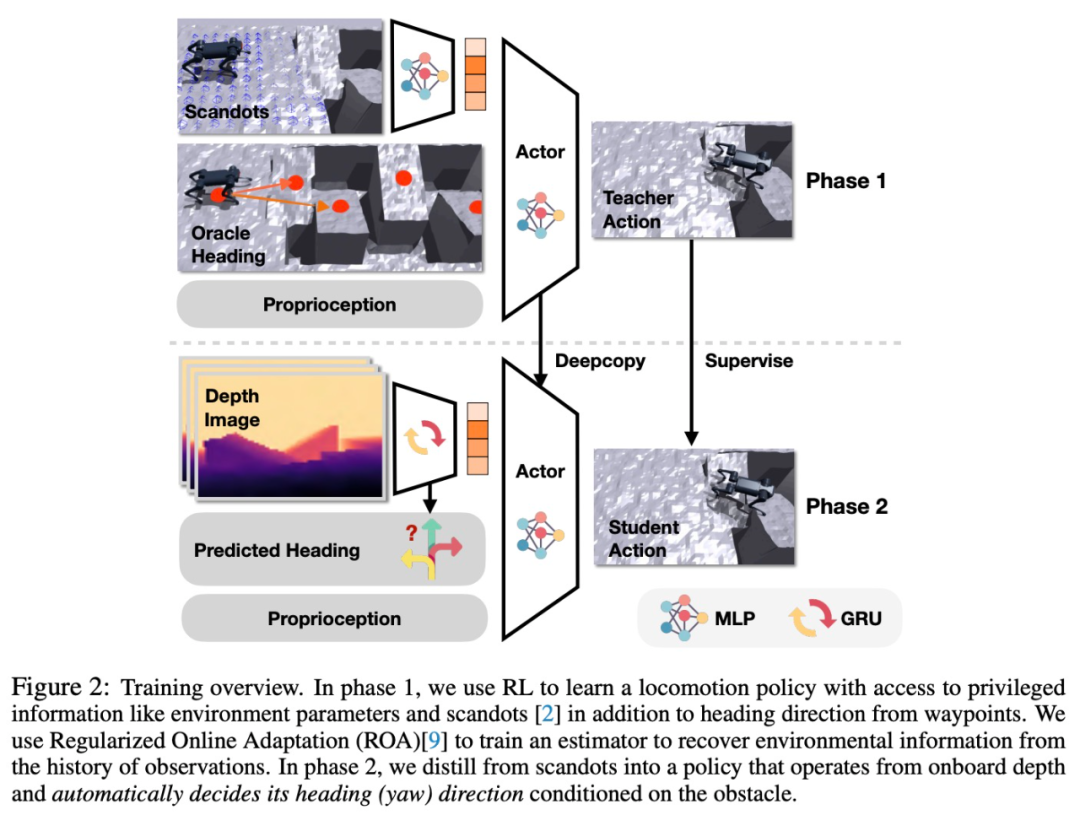
Hasil eksperimen
Matlamat penyelidikan ini adalah untuk membolehkan anjing robot menguasai 4 kemahiran, termasuk memanjat, melompat melepasi celah, berlari dan melompat di cerun, dan berdiri terbalik. Jadual 1 di bawah menunjukkan hasil perbandingan berbanding dengan beberapa kaedah lain 🎜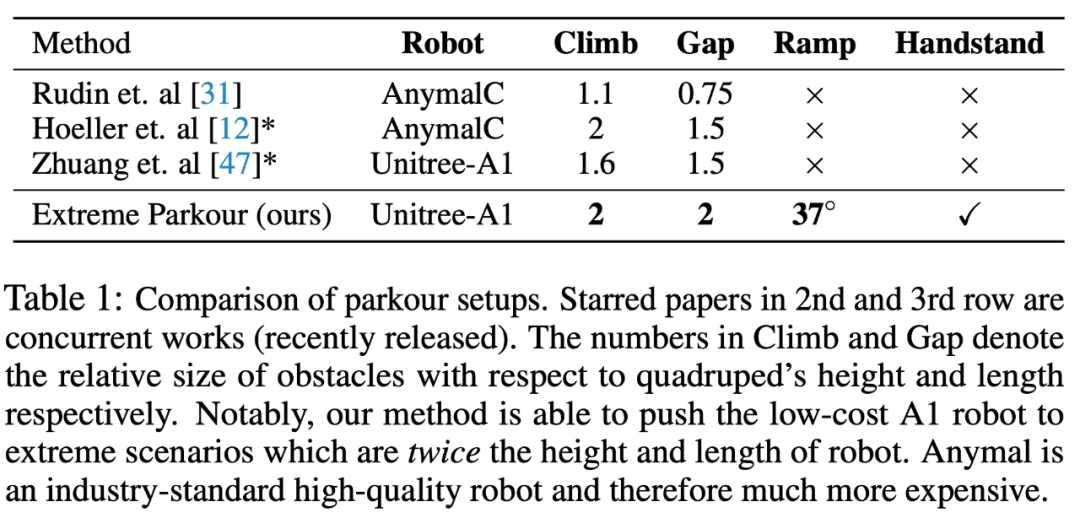
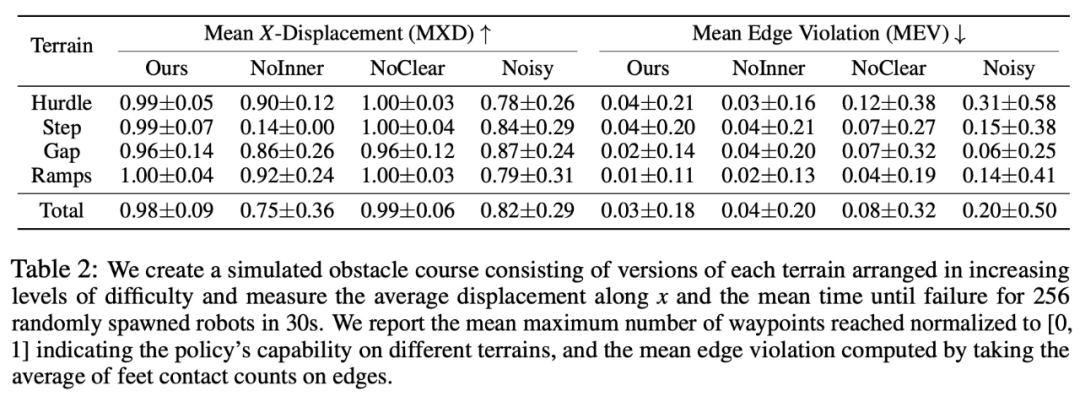
Untuk mengesahkan peranan setiap bahagian dalam sistem, kajian mencadangkan dua set garis dasar. Kajian pertama kali menguji reka bentuk ganjaran dan proses keseluruhan, dan hasilnya ditunjukkan dalam Jadual 2 di bawah:
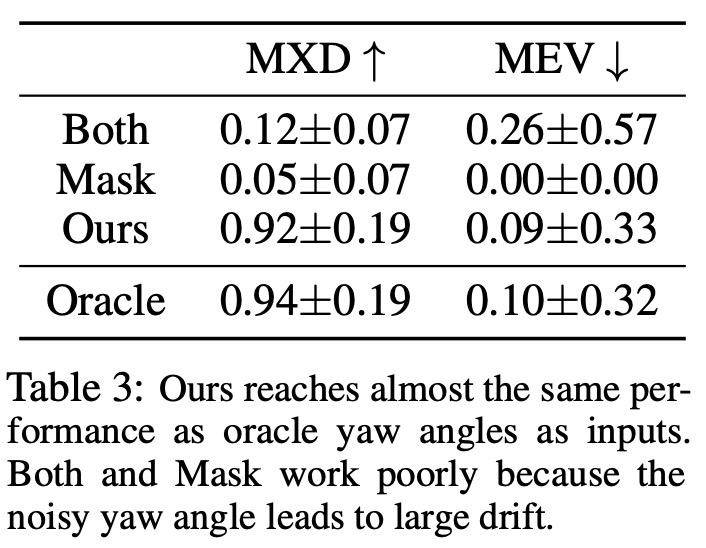
Tujuan set garis dasar kedua adalah untuk menguji persediaan penyulingan, yang termasuk BC untuk ramalan arah dan pisau untuk tindakan. Keputusan eksperimen ditunjukkan dalam Jadual 3
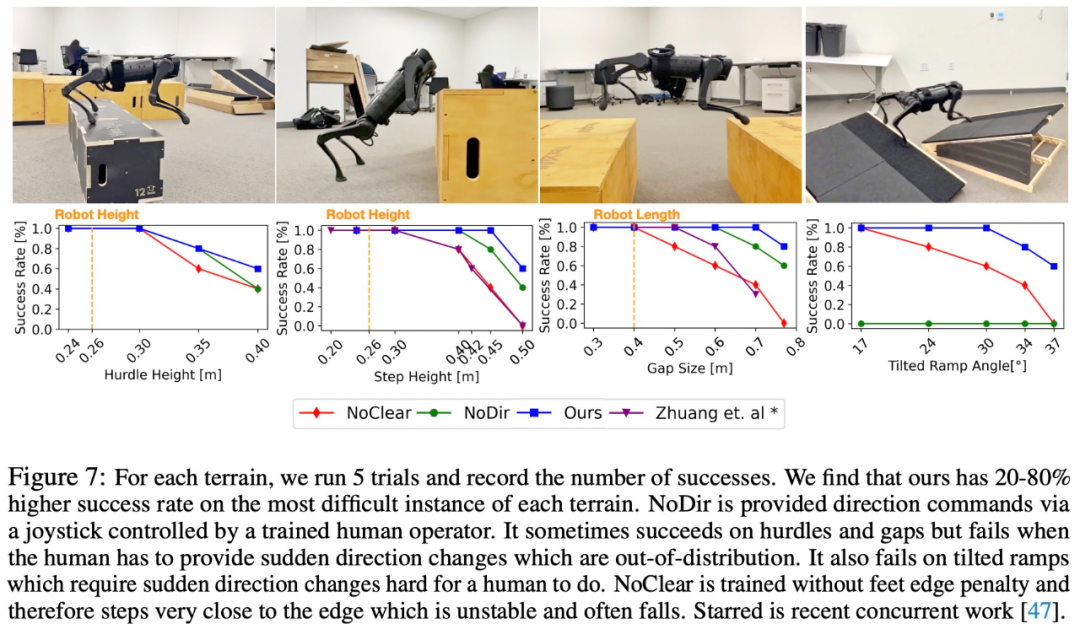
Selain itu, kajian itu juga menjalankan beberapa eksperimen kehidupan sebenar, merekodkan kadar kejayaan, dan membandingkannya dengan garis dasar NoClear dan NoDir. Keputusan percubaan ditunjukkan dalam Rajah 7
Pembaca yang berminat boleh membaca teks asal kertas untuk mengetahui lebih lanjut tentang kandungan penyelidikan.
Atas ialah kandungan terperinci Yang mengganggu, anjing robot sudah mempunyai keupayaan ini. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!